
Fターム[3D246GB27]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795)
Fターム[3D246GB27]の下位に属するFターム
緊急時制動補助(ブレーキアシスト) (205)
予備制動、警告のための制動 (43)
余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB27]に分類される特許
141 - 160 / 250
車両用走行支援装置および車両用走行支援方法
【課題】障害物回避制御を行う場合に、運転者の違和感を抑制すること。
【解決手段】回避経路情報演算手段が、自車両が障害物と車幅方向で重なり始めるときに、自車両のヨーレートが障害物から自車両が遠ざかる向きとなるように回避経路の情報を算出する。車両挙動制御手段が、算出した回避経路の情報に基づき、当該回避経路に沿って自車両が走行するように自車両の挙動を制御する。このため、自車両が障害物と車幅方向で重なり始めたときに、自車両を障害物から遠ざかる向きに回頭させることができる。そして、自車両が障害物に近づく方向に向かうような感覚を運転者に与えることを防止できる。この結果、障害物回避制御を行う場合に、運転者の違和感を抑制できる。
(もっと読む)
車両退避装置

【課題】意識低下した運転者の状態に応じた適切な車両誘導を行う車両退避装置を提供すること。
【解決手段】車両の運転者が意識低下した状態であるか否かを判断し(S10)、車両の運転者が意識低下した状態であると判断された場合に眠気により意識低下しているか否かを判断し(S12)、運転者が眠気以外によって意識低下していると判断された場合に意識回復動作を行わずに車両誘導を行い(S14)、運転者が眠気によって意識低下していると判断された場合に意識回復動作を行いながら車両誘導を行う(S24)。これにより、運転者が眠気によって意識低下している場合には眠気を解消させることができ、運転者が病気などにより意識低下している場合には意識回復動作を行わず、安静にして運転者の状態の悪化を抑制することができる。
(もっと読む)
車両制御装置
【課題】走行シーンに合わせた適切な車両制御を行う。
【解決手段】車両1が後退動作中である場合、制御部4が、車両1の進行方向と接近車両が走行している道路の延在方向とがなす角度に応じて制動制御作動距離を設定する。これにより、車両1後方に接近車両が通過可能なスペースがなく、運転者が後退操作を早く終了させることを望んでいる可能性が高いシーンでは遅いタイミングで制動制御が行われるようになるので、制動制御に対して運転者が感じる煩わしさや違和感を低減させることができる。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】運転者による車線変更の行動に、車線逸脱防止制御の作動を合致させる。
【解決手段】車線逸脱防止装置は、走行車線に対して逸脱傾向が発生している方向への運転者の車線変更の意思を検出した場合、その車線変更のリスクの度合いを判定し、リスクが高いと判定した場合、車線逸脱防止制御を作動させて、リスクが低いと判定した場合、車線逸脱防止制御を作動させないようにする(ステップS4〜ステップS5)。
(もっと読む)
車両制御装置
【課題】運転者が適切な位置に車両を駐車させることができなくなったり、車両制御に対し運転者が煩わしさを感じたりすることを防止する。
【解決手段】制御部4が、車両1よりも障害物側に設定された目標停止位置まで後退して停止する後退制御処理を、車両1から障害物までの距離が最終目標停止距離以下となるまで繰り返し実行することにより、障害物に対し車両1を段階的に後退させる。これにより、従来の車両制御装置のように、運転者が適切な位置に車両を駐車させることができなくなったり、車両制御に対し運転者が煩わしさを感じたりすることを防止できる。
(もっと読む)
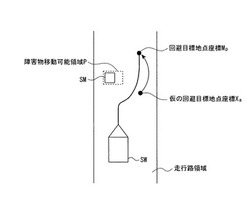
走行制御装置、及び走行制御方法
【課題】自車両の車線変更などの横移動を抑制するタイミングを最適化する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定横位置XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、走行車線に対する自車両の現在横位置Xeを検出し(ステップS6)、この現在横位置Xeが側方物体に近いほど、後刻横位置Xfが所定横位置XLに達しやすくなるように、後刻横位置Xfを補正する。すなわち、現在横位置Xeが側方物体に近づくほど、1よりも大きい値になる補正ゲインαを算出し(ステップS7)、推定した後刻横位置Xfに補正ゲインαを乗じることで、この後刻横位置Xfを補正する(ステップS8)。
(もっと読む)
走行支援装置
【課題】レーンマーカ等の道路情報を検出できない道路でも該道路情報を検出できる道路でも、周辺車両との接触の危険性を判断し、適切なタイミングで適切な対処を行う衝突防止支援装置を提供すること。
【解決手段】自車両と周辺に存在する周辺走行車両を検出する第1のセンサと、道路上のレーンマーカを検出する第2のセンサと、前記自車両と前記周辺走行車両との位置関係を算出する第1の算出部と、前記位置関係に基づいて、前記周辺走行車両が前記自車両に衝突する確率の分布を示す危険度を算出する第2の算出部と、前記危険度に基づいて、制御閾値を設定する設定部と、前記第2のセンサが前記レーンマーカを検出していない場合は、自車両と周辺走行車両との位置関係に基づいて制御閾値を設定し、前記第2のセンサが前記レーンマーカを検出している場合には、当該レーンマーカ及び前記位置関係に基づいて前記制御閾値を設定する設定部を備えること。
(もっと読む)
補助制動装置
【課題】緊急時に大きな制動力を効果的に得る。
【解決手段】
緊急制動判定装置16により緊急制動が必要である判定された場合、制動部材12内の火薬の爆発によって制動部材12が拡大し、下側が道路に接触することによって制動力が発生する。また、押しつけ制御機構により制動部材を上下に移動することで、道路への押しつけ力を制御する。従って、緊急時に、火薬の爆発による制動部材の拡大および押しつけ制御機構による押しつけ力によって制動力を得ることができる。
(もっと読む)
車両用制駆動力制御装置
【課題】 ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる車両用制駆動力制御装置を提供する。
【解決手段】 エンジン39の出力により駆動する左右前輪FL,FRと、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、少なくともエンジン39に対してHU31が制動力を与えているときはエンジン39のブレーキトルクを低減させる。
(もっと読む)
ブレーキ制御装置およびその制御方法
【課題】 ペダルストロークを確保しつつ部品点数の増加を抑制したブレーキ制御装置を提供する。
【解決手段】 コントロールユニットは、車両の状態に応じてアウト側ゲート弁を閉弁方向に制御し、液圧源を駆動することによりホイルシリンダ圧を増圧する自動ブレーキ増圧制御を実行し、自動ブレーキ増圧制御中にブレーキ操作が検出された場合、液圧源の駆動量を増加させることとした。
(もっと読む)
運転支援装置
【課題】周囲環境に応じた安全性の高い運転を促しつつ、停止位置で車両を確実に停止させることができる運転支援装置を提供する。
【解決手段】運転支援装置1では、自車両10の車速が制限速度以下の場合、警報条件として通常の第1条件が適用され、この第1条件下で停止支援が実行される。自車両10の車速が制限速度を超えている場合、警報条件として第1条件よりも厳しい第2条件が適用され、この第2条件下で停止支援が実行される。よって、自車両10の車速が制限速度を超えている場合、第2条件K2下で停止支援が実行され、制限速度を遵守させるような運転が促されつつ停止位置で車両が停止されることとなる。
(もっと読む)
車両制御装置
【課題】 ドライバの制動意思に合致した減速開始タイミングを実現できる車両制御装置を提供する。
【解決手段】 コントロールユニット4は、アクセル状態検出部2によりアクセル操作量の減少またはアクセルオフが検出され、かつ、走行進路状況検出部3により走行進路に減速対象が検出された場合には、ブレーキ制御部5を作動させる。
(もっと読む)
ブレーキ制御装置
【課題】複数系統のブレーキ液路を介して各ホイールシリンダに供給されるブレーキ液のブレーキ液圧をブレーキ液路毎に検出できると共に、それらの検出結果に基づき所望どおりにブレーキ液圧を的確に制御することができるブレーキ制御装置を提供する。
【解決手段】マスタシリンダ17から第1ブレーキ液路18及び第2ブレーキ液路19を介して供給されるブレーキ液のブレーキ液圧に応じた制動力を対応する車輪に付与するホイールシリンダ20a〜20dと、各ホイールシリンダ20a〜20dに供給されるブレーキ液のブレーキ液圧を検出するホイールシリンダ圧センサ71と、そのセンサ71の検出対象を各ブレーキ液路18,19間で相互に切り替え可能な切り替え弁69とを設けた。
(もっと読む)
車両の運転支援装置
【課題】交差点に進入する車両の自車両に対する認識度を的確に判断し、交差点における自車両の情報を適切に加味して安全性を確保しつつスムーズな交通の流れを維持して自然で適切な運転支援を行う。
【解決手段】対象車両のドライバの顔向き方向に応じて対象車両のドライバの顔向き度Fiを設定し、対象車両のドライバの顔向き度Fiを基に自車両の被認知度Riを演算し、自車両の被認知度Riを基に自車両のリスクRiskiを演算して、自車両の被認知度Riが閾値Ricより高く且つ対象車両が1台しか存在しない場合、自車両が対象車両に対して優先走行の関係にある場合は、自車両のリスクRiを減少補正する。また、自車両の被認知度Riが閾値Ric以下、或いは、対象車両が複数存在する場合、自車両のリスクRiskiが閾値Riskltより高い場合はライトを点灯させる。
(もっと読む)
運転支援装置
【課題】自車両周辺の移動体が規定されている交通ルールを違反した場合でも自車両に対して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】移動体の交通ルールに基づいて運転支援を行う運転支援装置1であって、任意の領域において移動体が遵守する可能性の高い交通ルールを取得する交通ルール取得手段11,12,13を備え、交通ルール取得手段で取得した交通ルールに基づいて運転支援を行うことを特徴とし、特に、任意の領域において規定されている交通ルールと交通ルール取得手段で取得した交通ルールとが整合しない交通ルール逸脱領域を取得する領域取得手段13、あるいは、任意の領域において規定されている交通ルールと交通ルール取得手段で取得した交通ルールとが整合しない場合には交通ルール取得手段で取得した交通ルールに修正する交通ルール修正手段を備える構成とするとよい。
(もっと読む)
車両用ブレーキシステム
【課題】助手席の乗員によるブレーキ操作装置の操作によりブレーキが作用させられるブレーキシステムの不都合を解決する。
【解決手段】運転席側ブレーキ操作装置と助手席側ブレーキ操作装置とを含む液圧ブレーキシステムにおいて1以下のアシスト係数を設定し、助手席乗員による助手席側ブレーキペダルの踏込みにより得られる踏力に掛け、それにより得られる助手席側踏力と、運転者による運転席側ブレーキペダルの踏込みにより得られる踏力とのうち、大きい方の踏力に基づいて液圧制御弁装置のリニアバルブへの供給電流を決定する(S14〜S17)。助手席側踏力に基づいて液圧ブレーキが作用させられても、実際より減少させられた助手席側踏力に基づいて供給電流を決定することができるため、助手席乗員により運転者が意図しない制動が行われても、助手席乗員の操作に応じたブレーキの作用力が得られるとともに運転者が感じる違和感や不満が少なくて済む。
(もっと読む)
乗員保護装置
【課題】緊急状態を予測した際に効率的に電力を確保して供給することを目的とする。
【解決手段】衝突判断ECU22によって衝突が予測された場合(衝突予測時間が所定時間t1未満となった場合)に、電源制御ECU40が、モータジェネレータ44を発電器として機能させて回生電力を発生させ、該回生電力を各種アクチュエータ(シートアクチュエータ28、プリテンショナアクチュエータ30、及びブレーキアクチュエータ34等)に供給するように、電源制御セレクタ42を制御する。
(もっと読む)
車両走行制御装置及びその方法
【課題】車両が衝突した場合に適切な処理を車両に施す。
【解決手段】車両走行制御装置50は、車両10の衝突を検出する衝突検出センサ16、18により衝突が検出されたとき、走行速度制限部22Aにより車両10の最高走行速度を制限速度に制限するようにしているので、衝突発生後の車両10を適切な速度で走行移動させることができる。衝突時の車両の最高走行速度は、例えば、運転中に直ちに停車できる徐行速度程度に制限する。
(もっと読む)
車両の障害物検知装置
【課題】自車両の発進時に駆動輪が空転して自車両が走行できない状況を想定し、この状況下で、自車両前方の障害物が静止物であることを精度良く確実に判定できる、車両の障害物検知装置を提供する。
【解決手段】レーダユニット2により自車両Cに対して自車両前方の障害物の相対位置と相対速度とが検知され、その障害物検知情報に基づいて自車両Cの作動機器が制御されるが、更に、自車両Cの駆動輪の回転の有無と自車両Cの移動の有無が検知され、駆動輪の回転が検知された場合であって、自車両Cの移動が検知されない場合、検知された障害物の自車両に対する相対速度に変化がない障害物は静止物であると判定される。
(もっと読む)
ブレーキ制御装置
【課題】車両が駐車から発進する時に運転者の誤操作、たとえばギヤを入れ間違えて発信すれば不測の事態が起こりうる。
【解決手段】ブレーキ制御装置において、電動パーキングブレーキは、電動アクチュエータの駆動により車輪14に制動力を付与する。電動パーキングブレーキ制御部は、電動パーキングブレーキを制御する。周囲状態検出部は、車両10の周囲の状態を検出する。シフト位置検出部は、操作レバーの位置を検出する。障害物検出部は、シフト位置検出部が検出した操作レバーの位置から車両10の発進方向を特定し、特定した発進方向の障害物を検出する。回避判定部は、発進方向の障害物を車両10が回避可能かどうかを判定する。車両10が発進方向の障害物を回避不能な場合に、電動パーキングブレーキ制御部は、電動パーキングブレーキを作動状態にし、または電動パーキングブレーキの作動状態の解除を禁止する。
(もっと読む)
141 - 160 / 250
[ Back to top ]