
Fターム[3D246GB31]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | カーブに備えた安全車速への減速 (114)
Fターム[3D246GB31]の下位に属するFターム
減速度の制御 (58)
Fターム[3D246GB31]に分類される特許
1 - 20 / 56
車両の走行制御装置
【課題】制動条件の異なる2以上の制御モードを協調して車両を走行制御する際に、制御モードの切替を適切に行うことを可能とする。
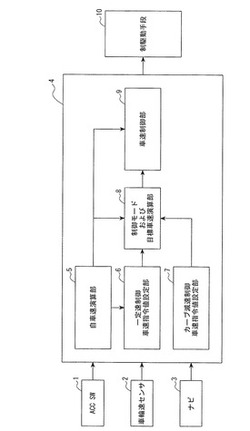
【解決手段】互いに異なる制動条件で車両を制駆動制御する2以上の制御モードを協調制御して、走行状態に基づき採用する制御モードを切り替える車両の走行制御装置4である。走行路の勾配の状態に応じて、カーブ減速制御モードから一定速制御モードへの切替の閾値を変更する。具体的には、下り勾配であるほど、上記閾値を高くする。
(もっと読む)
車両用運転操作支援装置

【課題】車両を減速させる運転操作支援の制御において違和感が生じることなく運転操作支援を行う。
【解決手段】ナビゲーション装置3からの道路情報に基づいて進路上にカーブが有る場合に、カーブ開始位置の目標地点の目標速度まで減速させるための高低2つの減速ラインを設定し、車速の高低に応じていずれか一方の減速ラインで減速させるために車速が減速ラインを超えていたらナビゲーション装置や画面表示可能な装置で減速の表示を行い、さらにアクセル反力を発生させたり、ブレーキによる制動を行ったりし、かつ目標地点近傍にそれらの制御を解除する不感帯を設ける。目標地点に近付いて複数の減速ライン間が狭まることにより、隣接する減速ラインを交互に制御の基準として異なる種類の制御が行われることによる運転者に与えてしまう違和感を防止し得る。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
【課題】アクセルペダル誤操作を検出して車輪にブレーキトルクを発生させる技術において、ドライバがステアリングを適切に操作できない場合でも、車両が危険領域に進入してしまう可能性を従来よりも低減する。
【解決手段】アクセルペダルの誤操作を検出したとき、現在のタイヤ舵角で左側制動輪および右側制動輪にブレーキトルクを発生させたときに車両が安全領域から逸脱すると判定した場合には、車両の右側制動輪のみまたは左側制動輪のみにブレーキトルクを発生させる。これにより車両は、左右の両制動輪にブレーキトルクを発生したときの軌跡よりも、右側または左側にカーブする。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
車両制御装置
【課題】複数種類の走行制御による所定区間の相互に異なる分割要求に対して、記憶容量の制限を考慮しつつ適切に所定区間を分割することができる車両制御装置を提供する。
【解決手段】複数種類の走行制御による前記リンクの相互に異なる分割要求に対して、前記リンクが分割された分割区間毎に前記走行負荷情報を記憶する為のメモリ部82の記憶容量が不足する場合に、分割調停部84によりその異なる分割要求が取捨選択されてその異なる分割要求が調停されるので、メモリ部82の記憶容量の制限を考慮しつつ適切にそのリンクを分割することができる。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段と、自車両の位置を取得する自車位置取得手段と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段と、を有し、車両運動制御演算手段は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算する。
(もっと読む)
車両制御装置
【課題】データ量を抑えることができ、実現性の向上を図ることができる車両制御装置を提供する。
【解決手段】車両制御装置1では、運転者の通常ブレーキの減速度αnormalに基づいてカーブの入口に到達したときの車速Vcurve及びカーブへの進入時における最大車速Vthreshを求め、車速Vcurveが最大車速Vthreshよりも大きい場合に、運転支援制御を実施させている。このように、運転者の通常ブレーキの減速度αnormalを記憶するだけで、適切な運転支援を行うことができるため、運転者毎にカーブ等のパラメータを記憶する必要がない。したがって、データ記憶容量に記憶されるデータ量を抑えることができ、実現性の向上を図ることができる。
(もっと読む)
車両制御装置
【課題】車速制御中にドライバがブレーキ操作を行ったときに受ける違和感を防止する車両制御装置を提供することを課題とする。
【解決手段】自車両の車速を制御する車両制御装置であって、自車両のドライバのブレーキ操作を検出するブレーキ操作検出手段と、車速制御中に自車両のドライバがブレーキ操作を行ったときに当該ブレーキ操作における踏力が閾値以下の場合に車速制御の解除を禁止し、通常の車速制御とは異なるブレーキ操作時の車速制御に切り替え、自車両のドライバがブレーキ操作を終了した場合にブレーキ操作時の車速制御から通常の車速制御に切り替える制御切替手段を備えることを特徴とする。
(もっと読む)
目標充電電力設定装置、方法およびプログラム
【課題】回生ブレーキによって車両を減速させる場合に運転者の意志に応じた回生ブレーキを発生させることは不可能であった。
【解決手段】車両の運転者の減速操作によって目標位置において目標車速となるように前記車両を減速させた場合の車速の推移を示す操作減速車速情報を取得し、バッテリに対して目標充電電力を充電する回生ブレーキによって前記目標位置において前記目標車速となるように前記車両を減速させる場合の車速の推移を示す回生減速車速情報を取得し、前記目標位置において前記目標車速となるように前記車両を減速させる場合の車速が、前記操作減速車速情報が示す車速と前記回生減速車速情報が示す車速との間で推移するように前記車両を減速させるために前記バッテリに対して充電すべき電力を新たな目標充電電力として設定する。
(もっと読む)
車両制御装置
【課題】自動制御運転の不可能な道路で自動制御運転で運転を行うのを防止することができる車両制御装置を提供する。
【解決手段】車両制御装置1は、車両の現在地を検出し、位置検出精度が所定値以下である地点を識別する特定情報を取得し、特定情報が付与されている地点が有ることを取得したとき、自動制御運転を回避すべき処理を実行するナビゲーション装置3と、検出された現在地に基づいて、道路状態に応じて前記車両の自動制御運転を行う制御装置2とを備える。
(もっと読む)
制駆動力制御装置
【課題】カーブ走行時における車両の走行状態を運転者の感覚に沿ったものとすることができる制駆動力制御装置を提供すること。
【解決手段】カーブ走行時の車両の制駆動力を制御する制駆動力制御装置であって、カーブの入口側において車両に前後方向の減速度が作用した状態で旋回を開始した後の減速時に、車両に作用する横加速度と前後方向の減速度とが予め設定された第一の関係となるように制駆動力を制御(S90)可能であり、第一の関係は、入口側において旋回を開始したときに車両に作用している横加速度および前後方向の減速度に基づく。制駆動力の制御を実行するか否かは、過去のカーブ走行時に運転者が運転操作をして車両に作用した横加速度と前後方向の減速度との関係である第二の関係に基づき判定される(S60)。
(もっと読む)
車両制御装置および車両制御方法
【課題】走行実績のある走行情報を使用して、安全な運転計画を生成することが可能な車両制御装置および車両制御方法を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車の走行実績のある走行情報(前後Gx、横Gy、および位置情報等を含む)を入力し、走行実績のある前後Gxおよび横Gyに基づいて、運転計画の対象となる道路の路面μを推定し、推定した路面μに基づいてタイヤ発生力を算出し、算出したタイヤ発生力を超えない条件で運転計画を生成する。
(もっと読む)
電気自動車の車輪スリップ制御装置
【課題】電気自動車の駆動輪がロックする傾向にあるときに、電気自動車の運転状態に応じて駆動輪のスリップを適正に制御するようにした車輪スリップ制御装置を提供する。
【解決手段】車両ECU(24)は、駆動輪(16,18)がロックする傾向にあるときに、電動機(6)をモータ作動または発電機作動に切り換えて制御することにより、駆動輪(16,18)の路面に対するスリップ率を目標スリップ率に近付ける。このとき、ハイブリッド電気自動車(1)が直進運転状態にある場合には、車両ECU(24)が第1スリップ率を上記目標スリップ率とする。一方、ハイブリッド電気自動車(1)が旋回運転状態にある場合には、車両ECU(24)が上記第1スリップ率よりスリップ率の増大側に設定された第2スリップ率を上記目標スリップ率とする。
(もっと読む)
車両の速度制御装置
【課題】簡素化された道路データベースを用いて、車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の速度制御装置の提供。
【解決手段】道路データベースにて、道路のカーブ内における屈曲度一定区間Cr#を定義するため、屈曲度一定区間Cr#の端点位置である第1位置Px#、及び、屈曲度一定区間Cr#の一定屈曲度Rm#が予め記憶されている。車両位置Pvhに基づいて、車両前方における車両が走行している道路上に存在する屈曲度一定区間Cr#のうちで車両に対して最も近い位置に存在する基準屈曲度一定区間が決定される。車両の実車速Vxa、基準屈曲度一定区間Cr#の第1位置Px#、及び、基準屈曲度一定区間Cr#の一定屈曲度Rm#に基づいて、運転者による加減速操作がなされない場合においても、車両がカーブを適正に通過するためにカーブ減速制御が実行される。
(もっと読む)
車両運転システム
【課題】通常走行時の車両速度を学習し、エンジンが燃料を無駄に消費することを抑えられる車両運転システムを提供する。
【解決手段】車両の位置を検出する車両位置検出手段(GPSセンサ3)と、車両速度を検出する車両速度検出手段(車速センサ4)と、既に走行したことがある経路における車両の速度情報が記憶される記憶手段(記憶媒体8)と、現在の車両の位置における車両速度が記憶されている過去の車両速度の統計値(平均値X)に対して基準値以上に高い車両速度超過領域を判定する判定手段と、車両速度超過領域に入ったことを運転者に知らせる注意喚起手段及び車両速度超過領域にて車両速度を抑える車両速度制御手段の少なくとも一方と、を備える構成とした。
(もっと読む)
車両制御装置
【課題】 ドライバの制動意思に合致した減速開始タイミングを実現できる車両制御装置を提供する。
【解決手段】 コントロールユニット4は、アクセル状態検出部2によりアクセル操作量の減少が検出され、かつ、カーブ検出部8により走行進路にカーブが検出された場合には、ブレーキ制御部5を作動させる。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感となる不必要な予圧制御(予備制御)を抑制する。
【解決手段】
車輪の制動トルクを制御する制動手段と、車両の操舵角速度を取得する操舵角速度取得手段と、操舵角速度取得手段の取得する操舵角速度に基づいて基準横加速度を決定する決定手段と、車両の実横加速度を取得する実横加速度取得手段とを備える。決定手段は、操舵角速度が大きいほど基準横加速度を小さい値に決定し、或いは、操舵角速度が小さいほど基準横加速度を大きい値に決定する。実横加速度取得手段が取得する実横加速度が基準横加速度を超えたときに、制動手段を介して車輪への制動トルク付与を開始する。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】カーブの勾配に応じて変化する車両の挙動やカーブの状況を考慮した適切な運転支援を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置50は、車両の進行方向に存在するカーブの勾配及び旋回方向を特定し、当該特定した勾配及び旋回方向に基づき、カーブを走行する車両が当該カーブの走行車線から逸脱する可能性の高い逸脱方向を特定する逸脱方向特定部53aと、逸脱方向特定部53aが特定した逸脱方向におけるカーブの状況を特定し、当該特定した状況に基づき支援内容を決定し、当該決定した内容の支援を行う支援部53bとを備える。
(もっと読む)
車両運転支援装置
【課題】擦れや汚れ等のために路面の白線種別を認識できない場合でも、その白線種別を容易に推定して、自律的な車両制御を行えるようにする。
【解決手段】路面状態検出装置1として、リアカメラ6と、自車両の走行車線を区分する白線の種別を認識する白線種別認識部8と、白線種別記憶部9、および白線種別推定部10と、白線種別に基づいて車両制御を行う車両制御装置とを備えている。自車両の現在の走行車線を区分する白線種別を画像処理によりリアルタイムで認識し、その認識した白線種別を走行履歴のかたちで白線種別記憶部9に記憶しておく。白線種別を認識ができないときには、白線種別推定部10が白線種別記憶部9に記憶されている過去の白線種別を現在の白線の種別として推定し、それに基づいて速度制御を行う。
(もっと読む)
1 - 20 / 56
[ Back to top ]