
Fターム[3D246GB39]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 回生ブレーキとの統合制御 (485)
Fターム[3D246GB39]に分類される特許
21 - 40 / 485
ストロークシミュレータ、このストロークシミュレータを有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステム
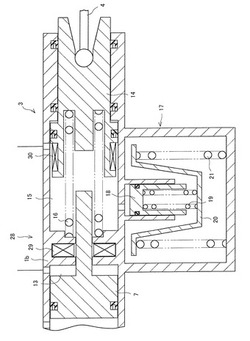
【課題】作動開始時により一層小さな入力で入力軸を作動開始させることができるようにして、ストロークシミュレーション機能の作動開始をより一層スムーズに行う。
【解決手段】入力軸4の作動開始時に補助動力部28の電磁石29がN極に励磁されることで、この電磁石29とS極に励磁された永久磁石30との間の吸引力により補助動力がシミュレータ作動ピストン14に前進方向に加えられる。これにより、入力軸4の作動開始時の入力が小さくなる。また、入力軸4の後退ストローク時に電磁石29がS極に励磁されることで、電磁石29と永久磁石30との間の反発力により補助動力がシミュレータ作動ピストン14に後退方向に加えられる。このとき、電磁石29への通電を制御することで、所望のヒステリシスが得られる。
(もっと読む)
車両のブレーキ制御装置

【課題】 不感帯幅の拡大にともなうブレーキ操作フィーリングの低下を抑制しつつリニア制御弁の耐久性を向上させる。
【解決手段】 ブレーキECU100は、停車中であってブレーキペダルが保持操作状態であるときにリニア制御弁の作動量が正常範囲か否かを判定しておく。そして、ブレーキペダルが保持操作状態であり(S12:Yes)、車両が走行中であり(S15:Yes)、液圧の脈動が検出されているときに(S17:Yes)、リニア制御弁の作動判定結果が正常である場合(S19:Yes)に、制御開始閾値を通常制御開始閾値よりも大きくする(S20)。
(もっと読む)
ブレーキ制御装置
【課題】 回生制動力を有効に行うことができるブレーキ制御装置を提供すること。
【解決手段】 回生制動装置の作動時にポンプによってリザーバ内に貯留したブレーキ液をホイルシリンダへ送る回生協調増圧制御部と、回生制動装置の作動時にホイルシリンダに送られたブレーキ液をポンプアウト弁を経由しポンプを介してリザーバへ流入させる回生協調減圧制御部とを設けた。
(もっと読む)
ブレーキ制御装置
【課題】
ドライバの違和感を抑制することができるブレーキ制御装置を提供すること。
【解決手段】
ドライバによるブレーキペダル2の操作に対してマスタシリンダ4の圧力の上昇が抑制される無効ストローク動作中に、マスタシリンダ4内のブレーキ液を用いてホイルシリンダ5の圧力を調整する際、マスタシリンダ4とホイルシリンダ5を接続する第1ブレーキ回路(供給通路11)上に設けられたノーマルオープン型の電磁弁(ゲートアウト弁20)に対し、弁体200が閉弁する所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、連続して所定電流Iinitialより低い電流Ibalance(t)を通電する第2通電部72と、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)へ漸近させて移行する移行通電部73とを備えた。
(もっと読む)
電動油圧式ダイナミックブレーキシステムおよび制御方法
【課題】ダイナミック動作する電動油圧式ブレーキシステムの簡素化。
【解決手段】第1のチャンバ122とブレーキ液リザーバ14との間の接続部は、電磁弁50を備えている。制御回路40は、選択または指定された制動モードに従ってリザーバ14の電磁弁50と高圧畜圧器60の電磁弁70とを制御する。ダイナミック制動段階は、閾値速度に減速するまで車輪ブレーキFR1−4からマスタシリンダ10を遮断しながらエネルギー回生を伴うステップと、その後、停止まで第1のチャンバ122だけを高圧畜圧器60とESPモジュール30とに接続することによって、高圧畜圧器60の加圧下で上記モジュールにブレーキ液を供給するとともに、機械的な制動のために車輪ブレーキFR1−4を供給するステップとの2つのステップに分けられる。
(もっと読む)
車両用のブレーキ装置
【課題】回生協調に対応しブレーキ応答遅れを抑制することができるブレーキ装置を提供する。
【解決手段】ブレーキ装置は、回生トルク取得部により取得された回生トルクに応じたブレーキ液圧である制御液圧を発生させる制御液圧発生部15bと、ブレーキペダル11の操作量に応じたブレーキ液圧である反力液圧を発生させる反力液圧発生部12と、反力液圧発生部12に接続される反力液圧入力室20aと、制御液圧発生部15bに接続される制御液圧入力室20cと、サーボ室13eに接続されるサーボ液圧出力室20bと、が形成され、反力液圧から制御液圧を差し引いた液圧に応じたサーボ液圧をサーボ液圧出力室20bに発生させる機械式レギュレータ15cと、を備えている。
(もっと読む)
車両の制御方法及び制御装置
【課題】回生制動装置10と油圧式制動装置30とを備えた車両において、回生制動が付与されている車輪21にスリップが発生したときに、G抜け感の発生を抑制しつつ、上記車輪21のスリップを出来る限り早期に解消する。
【解決手段】回生制動が付与されている少なくとも1つの車輪21のスリップ率が第1所定値以上になったときに、回生制動が付与されている全車輪21に対する回生制動装置10による回生制動力を第1速度で減少させかつ油圧式制動装置30による油圧制動力を増加させ、該油圧制動力の増加後に、スリップ率が上記第1所定値以上になった車輪21に対して、油圧式制動装置30によるアンチロックブレーキ動作を実行させ、回生制動装置30による回生制動力を第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更する。
(もっと読む)
車両用制動力制御装置
【課題】車輪の制動力低下量の過不足をきたすことなく制動スリップを効果的に低減すること。
【解決手段】摩擦制動と回生制動との協調制御により各車輪の制動力を制御する車両用制動力制御装置であり、アンチスキッド制御が開始されると、当該時点に於いて発生している回生制動力とアンチスキッド制御による制動力低下要求量との大小関係に応じて、摩擦制動力の目標増減量を決定し、回生制動力を低減すると共に目標増減量に基づいて摩擦制動力を増減する。回生制動力が制動力低下要求量よりも大きく、制動スリップが高いときには、摩擦制動力の目標増減量を0に決定する。
(もっと読む)
車両用制御装置
【課題】道路の一区間(学習対象区間)の走行により得られる回生エネルギー量を精度良く推定することができる車両用制御装置を提供する。
【解決手段】学習手段70は、前記回生エネルギー学習制御において、車両6が道路の一区間である学習対象区間を走行しているときに蓄電装置56が少なくとも一時的に満充電状態であった場合には、学習データとして記憶する回生エネルギー量EGYrsを、蓄電装置56が終始満充電状態ではなかったと仮定して算出する。従って、蓄電装置56が満充電状態であればそのときの実際の回生エネルギー量EGYrsは零又は略零であるところ、そのように回生エネルギー量EGYrsが零又は略零であるとしては前記学習データは記憶されず、推定回生エネルギー量EGYersを精度良く推定するのに適した前記学習データを記憶することが可能である。
(もっと読む)
車両のブレーキ制御装置
【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧アクチュエータと、統合コントローラとを備え、統合コントローラは、停車時モータオフ制御部と、昇圧勾配制限部とを有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータを停止し、車両停止中、VDCモータの停止状態を維持したままとする。昇圧勾配制限部は、車両停止状態からの車速発生により停車時モータオフ制御を終了するとき、ドライバのブレーキペダルリリース前の目標減速度と、そのときのホイールシリンダ圧による実減速度と、の差異が大きくなるほど、VDCモータの作動再開に伴うホイールシリンダ圧の上昇勾配を小さくする。
(もっと読む)
車両のブレーキ制御装置
【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧アクチュエータ2と、統合コントローラ9と、を備え、統合コントローラ9は、停車時モータオフ制御部(ステップS9)と、昇圧勾配制限部(ステップS15〜ステップS20)と、を有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータ21を停止し、車両停止中、VDCモータ21の停止状態を維持したままとする。昇圧勾配制限部は、停車時モータオフ制御を終了すると、ホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする。
(もっと読む)
車両用ブレーキ装置
【課題】一制動期間内でABS制御手段が作動し終了した後に再始動する見込みを増加させない範囲で回生制動力を発生し、従来よりも回生効率を向上した車両用ブレーキ装置を提供する。
【解決手段】液圧ブレーキ装置と、回生ブレーキ装置と、目標取得手段、協調制御手段、およびアンチロックブレーキ制御手段を有する制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、ブレーキ操作部材が継続して操作されている一制動期間内でアンチロックブレーキ制御手段が作動したときに、ABS制御期間が終了して協調制御手段が再始動した時点(時刻t4)の目標制動力FRを回生許可制動力FHと演算する最終値演算手段と、一制動期間内でABS制御期間が終了して協調制御手段が再始動した(時刻t4)以降に作動し、目標制動力FRが回生許可制動力FH未満であるときにのみ回生制動力FEの発生を許可する回生許可手段と、をさらに有する。
(もっと読む)
車両制御装置
【課題】 ペダル吸い込まれ感をより低減できる車両制御装置を提供する。
【解決手段】 ブレーキペダルBPのストローク量を検出するストロークセンサ42と、ストローク量がSTrmax未満の場合、最大回生制動力Frmaxと等しい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第1回生制動力算出部32aと、ストローク量がSTrmax以上の場合、最大回生制動力Frmaxより小さい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第2回生制動力算出部32bと、要求回生制動力Frreqに基づいて実際に発生された回生制動力の検出値である実行回生制動力Frと液圧制動力との和が車両に必要な制動力である要求総制動力Freqとなるように、要求総制動力Freqと実行回生制動力Frとの差分を要求液圧制動力Fwcreqとして算出する制動制御部32cと、を有するBCU32を備えた。
(もっと読む)
ストロークシミュレータ、このストロークシミュレータを有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステム
【課題】反力シミュレータ部材の付勢力による跳ね返り抵抗感を抑制してより一層良好な操作フィーリングを得る。
【解決手段】入力軸4の入力によりシミュレータ作動ピストン14が作動してシミュレータ作動液圧室15内に発生した液圧で、第1および第2反力シミュレータピストン18,
20が下動する。このとき、第1および第2反力シミュレータスプリング19,21の付
勢力で液圧室15内の液圧が入力に基づいた液圧となり、この液圧がピストン14を介して入力軸4に反力として伝達される。ピストン20の下動でその摺動抵抗力付与部材変形作動部20aが反力シミュレータピストン摺動抵抗力付与部材29を押圧変形する。これにより、ピストン20の作動に応じて変化する摺動抵抗力がピストン20に付与される。
(もっと読む)
自動車の回生制動システム
【課題】制動制御の正確度を向上させることができ、構造が簡単で、製造費が安作動効率を向上させることができる自動車の回生制動システムを提供する。
【解決手段】本発明の実施例による自動車の回生制動システムは、油圧で作動する自動車の回生制動システムにおいて、運転者の操作によって直接的に油圧を生成する第1シリンダー、自動車の制動に必要な油圧を生成して、ホイールに伝達する第2シリンダー、運転者が要求する制動力を認識して、油圧を生成する油圧生成器、及び前記第1シリンダーで生成された油圧を前記第2シリンダーに選択的に供給するように、前記第1シリンダーと前記第2シリンダーとの間に挿入される第1バルブ、を含むことを特徴とする。
(もっと読む)
車両の回生ブレーキ制御装置
【課題】比較的高速から低速まで一定の踏み込み量のブレーキペダル操作で減速をしても違和感の無い減速を可能とし、ABS作動時の減速感の途切れを抑えて運転者の不安感を解消することができる車両の回生ブレーキ制御装置を提供すること。
【解決手段】ABS装置と液圧ブレーキ及び回生ブレーキを備えた車両の液圧ブレーキによって発生する液圧制動力と回生ブレーキによって発生する回生制動力をABSの動作と車速に応じて制御して運転者が要求する制動力を得るとともに、回生ブレーキは、アクセルペダルの開放状態が検知されると「アクセルOFF回生制動力」を発生させ、ブレーキペダルの踏み込み操作が検知されると「ブレーキON回生制動力」を発生させ、ABS作動時に前記回生制動力をABS非作動時のそれよりも下げるよう制御する車両の回生ブレーキ制御装置において、回生制動力の低車速域の値が高車速域の値よりも大きくなるよう制御する。
(もっと読む)
車両制御装置
【課題】大型化を回避しつつ音振性能を確保し、安価でありながら適切な回生協調制御を達成可能な車両制御装置を提供すること。
【解決手段】モータを駆動源とする車両において、制動時にモータによる回生制動力と油圧による摩擦制動力とを協調させる回生協調制動力の制御において、回生協調制御により回生制動力から摩擦制動力にすり替えるときは、設定したすり替え速度範囲において、ギヤポンプの能力や音振性能への影響を及ぼさない範囲で、各制動力の変化勾配を最大変化勾配より小さな所定勾配以下に制限することで所望の制動力を得るととした。
(もっと読む)
ブレーキ制御システム
【課題】回生ブレーキの回生効率をより高める。
【解決手段】車両100の運動エネルギを利用して発電を行う回生ブレーキ101と、車両の運動エネルギを熱エネルギに変換する機械的ブレーキ200と、ブレーキペダル204を踏み込んでから機械的ブレーキ200が作動する前に回生ブレーキ101を作動させ、回生ブレーキ101の発電負荷が大きいほど、ブレーキペダル204を踏み込んでから機械的ブレーキ200が作動するまでの該ブレーキペダル204の踏込量を大きくし且つ回生ブレーキ101の発電電圧を低くする制御手段20と、を備える。
(もっと読む)
車両の協調ブレーキ制御装置
【課題】コストアップや重量増加を招くことなく、運転者が要求する大きさの制動力を確保しつつブレーキ鳴きの発生を確実に防ぐことができる車両の協調ブレーキ制御装置を提供すること。
【解決手段】液圧制動力を発生する液圧ブレーキ5と回生制動力を発生する回生ブレーキ4を協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置18において、前記液圧ブレーキ5の最低液圧を設定し、前記液圧ブレーキ5を使用する場合には該液圧ブレーキ5を前記最低液圧以上の液圧で作動させる。具体的には、回生ブレーキ4の最高回生制動力を設定し、運転者が要求する制動力に対する最高回生制動力の不足分を液圧制動力で補い、該液圧制動力を発生させる液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ回生制動力を減少させる。
(もっと読む)
加減速度制御装置、加減速度制御方法
【課題】アクセル操作子にブレーキ操作子の機能を統合する場合の操作性を向上させる。
【解決手段】アクセルペダル8の操作位置Sに応じて車両の加減速度を制御すると共に、増加操作の場合と減少操作の場合とで、操作位置Sに応じた加減速度の制御特性を変化させる。増加操作の場合には、アクセルペダル8の操作位置Sが非操作位置S0から最大操作位置SMAXまで増加するときに、目標加減速度Gが0から予め定められた正側の最大加減速度GMAXまで増加する往路制御特性に従う。減少操作の場合には、アクセルペダル8の操作位置Sが減少操作検知時操作位置Sdから非操作位置S0まで減少するときに、目標加減速度Gが減少操作検知時加減速度Gdから予め定められた負側の最小加減速度GMINまで減少する復路制御特性に従う。
(もっと読む)
21 - 40 / 485
[ Back to top ]