
Fターム[3D246GC14]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御時期 (1,667) | 運転者による制動時 (534)
Fターム[3D246GC14]に分類される特許
21 - 40 / 534
車両のブレーキ制御装置
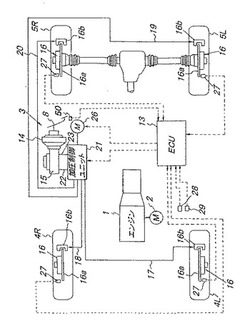
【課題】車両の走行中にエンジンが自動停止し、その後にエンジンを再始動するためにクランキングを行っているときにエンジンの吸気負圧が減少した場合であっても、所要の制動力を発生させることができる車両のブレーキ制御装置を提供すること。
【解決手段】エンジン自動停止・再始動制御手段と、作動中のエンジン1の吸気負圧を利用して運転者のブレーキ踏力をアシストするブースタ(踏力アシスト手段)14と、電動モータ26によって駆動されるポンプによってブレーキ液圧を加圧する加圧制御ユニット21と、を備えた車両のブレーキ制御装置(ECU)13において、再始動条件の成立後にエンジン1の再始動のためのクランキングを行っているときのブースタ14の負圧が設定値以上であるときにはクランキングを中止し、加圧制御ユニット21によってブレーキ液圧を加圧してブースタ14によるアシスト力の不足を補うようにする。
(もっと読む)
非常用制動システム

【課題】アクセルペダルとブレーキペダルを踏み間違えたときに瞬時に車両の挙動を安全側に制御する非常用制動システムを提供する。
【解決手段】この非常用制動システムは、ブレーキペダル26と間違えてアクセルペダル20を踏むなどして車両10が暴走してしまうような状況に陥ったときに、空いている左足で操作できるようにされた非常用ブレーキペダル30を踏み込むことにより、車輪ブレーキ22を作動させるとともにオートマティックトランスミッション14をニュートラルに切り換え、エンジン12から車輪への駆動力を遮断するように構成されている。
(もっと読む)
車両挙動制御システム
【課題】車両の挙動を安定化させることができる車両挙動制御システムを提供することを目的とする。
【解決手段】車両2の各車輪3に生じる制動力を個別に調節可能な制動装置7と、制動装置7を制御して車輪3のスリップ状態を制御するABS制御及び車両2の旋回状態を制御する旋回制御を実行可能な制御装置8とを備え、制御装置8は、ABS制御及び旋回制御の作動中に、車両2に作用する横方向加速度の絶対値が予め設定された所定加速度以下である場合に制動力の増加勾配を制限する一方、横方向加速度の絶対値が所定加速度より大きい場合に制動力の増加勾配を制限せず、さらに、制御装置8は、旋回制御における旋回制御量の絶対値が予め設定された所定制御量より大きい場合には制動力の増加勾配を制限しない。
(もっと読む)
車両の制動制御装置
【課題】機械式ブレーキによる制動トルクの応答遅れに拘らず合算トルク(MGトルク+ECBトルク)が適切に制御されるようにしてすり替えショックを抑制する。
【解決手段】すり替え過渡時に車両の制動トルクT2が要求制動トルクT1からずれた場合に、そのずれ(制動トルク偏差ΔT)が小さくなるようにモータジェネレータMGによる制動トルク(MGトルク)がフィードバック補正されるため、油圧ブレーキ62による制動トルク(ECBトルク)の応答遅れに拘らず要求制動トルクT1に応じて合算トルク(MGトルク+ECBトルク)が適切に制御されるようになり、車両の制動トルクT2の瞬間的な低下によるすり替えショックが抑制される。特に、モータジェネレータMGによる制動トルク(MGトルク)は応答性に優れているため、油圧ブレーキ62による制動トルク(ECBトルク)の応答遅れに拘らずすり替えショックを適切に抑制することができる。
(もっと読む)
車両用ブレーキ装置の制御装置
【課題】倍力制動装置を小型化しつつ、倍力制動装置で発生できる制動力以上の制動力を得られるようにする。
【解決手段】ブレーキ操作量が増大する要求制動力の増大時に、要求制動力が、ポンプで制動用液圧を発生する車輪別制動手段によるポンプアップ許可制動力を超えたときに、該ポンプの駆動を開始し、要求制動力が倍力制動装置で発生される制動用液圧(マスタ圧)の上限値付近に設定された設定値に達したときに、マスタ圧を前記ポンプで昇圧した制動液圧をホイールシリンダに供給するポンプアップ制御を行う(S3,S4,S6,S7,S8)。
(もっと読む)
車両停止判定装置
【課題】 精度良く車両停止状態を判断可能な車両停止判定装置を提供すること。
【解決手段】 本発明の車両停止判定装置にあっては、運転者の操作以外によってエンジンの停止・再始動が行われる動力源と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、前記車輪速検出手段により検出された従動輪車輪速が回転停止を第1所定時間以上継続し、かつ、駆動輪車輪速が回転停止を前記第1所定時間より長い第2所定時間以上継続したときは車両停止と判定する車両停止判定手段と、を備えた。
(もっと読む)
車両操作支援装置
【課題】障害物の移動状態に応じた車両の操作支援を実行可能な車両操作支援装置を提供すること。
【解決手段】自車に対する障害物を検知し、その検知結果を用いて少なくとも障害物と自車との相対速度及び相対距離を検出する障害物検知手段M1を備え、検出の結果に基づいて障害物に対する回避支援を行う車両操作支援装置Uにおいて、自車速度と相対速度と相対距離とに基づいて、障害物が回避支援の対象となるか否かを判定する回避支援対象判定手段M2を備え、相対速度が自車速度と略等しい場合に、障害物を、少なくとも車両進行方向に移動していない停止障害物であると判定し、相対速度が自車速度と異なる場合にて、相対速度と相対距離とに基づいて算出した衝突余裕時間の単位時間当たりの減少量が所定の減少量以上の場合は、障害物を急接近障害物と判定し、所定の減少量未満の場合は、障害物をその他の障害物と判定する。
(もっと読む)
車両のブレーキ制御装置
【課題】 不感帯幅の拡大にともなうブレーキ操作フィーリングの低下を抑制しつつリニア制御弁の耐久性を向上させる。
【解決手段】 ブレーキECU100は、停車中であってブレーキペダルが保持操作状態であるときにリニア制御弁の作動量が正常範囲か否かを判定しておく。そして、ブレーキペダルが保持操作状態であり(S12:Yes)、車両が走行中であり(S15:Yes)、液圧の脈動が検出されているときに(S17:Yes)、リニア制御弁の作動判定結果が正常である場合(S19:Yes)に、制御開始閾値を通常制御開始閾値よりも大きくする(S20)。
(もっと読む)
ブレーキ制御装置
【課題】
ドライバの違和感を抑制することができるブレーキ制御装置を提供すること。
【解決手段】
ドライバによるブレーキペダル2の操作に対してマスタシリンダ4の圧力の上昇が抑制される無効ストローク動作中に、マスタシリンダ4内のブレーキ液を用いてホイルシリンダ5の圧力を調整する際、マスタシリンダ4とホイルシリンダ5を接続する第1ブレーキ回路(供給通路11)上に設けられたノーマルオープン型の電磁弁(ゲートアウト弁20)に対し、弁体200が閉弁する所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、連続して所定電流Iinitialより低い電流Ibalance(t)を通電する第2通電部72と、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)へ漸近させて移行する移行通電部73とを備えた。
(もっと読む)
電動油圧式ダイナミックブレーキシステムおよび制御方法
【課題】ダイナミック動作する電動油圧式ブレーキシステムの簡素化。
【解決手段】第1のチャンバ122とブレーキ液リザーバ14との間の接続部は、電磁弁50を備えている。制御回路40は、選択または指定された制動モードに従ってリザーバ14の電磁弁50と高圧畜圧器60の電磁弁70とを制御する。ダイナミック制動段階は、閾値速度に減速するまで車輪ブレーキFR1−4からマスタシリンダ10を遮断しながらエネルギー回生を伴うステップと、その後、停止まで第1のチャンバ122だけを高圧畜圧器60とESPモジュール30とに接続することによって、高圧畜圧器60の加圧下で上記モジュールにブレーキ液を供給するとともに、機械的な制動のために車輪ブレーキFR1−4を供給するステップとの2つのステップに分けられる。
(もっと読む)
車両の制御方法及び制御装置
【課題】回生制動装置10と油圧式制動装置30とを備えた車両において、回生制動が付与されている車輪21にスリップが発生したときに、G抜け感の発生を抑制しつつ、上記車輪21のスリップを出来る限り早期に解消する。
【解決手段】回生制動が付与されている少なくとも1つの車輪21のスリップ率が第1所定値以上になったときに、回生制動が付与されている全車輪21に対する回生制動装置10による回生制動力を第1速度で減少させかつ油圧式制動装置30による油圧制動力を増加させ、該油圧制動力の増加後に、スリップ率が上記第1所定値以上になった車輪21に対して、油圧式制動装置30によるアンチロックブレーキ動作を実行させ、回生制動装置30による回生制動力を第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更する。
(もっと読む)
車両のヨーモーメント発生旋回効率化装置
【課題】急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行えるヨーモーメント発生旋回効率化装置を提供する。
【解決手段】左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20に適用される。操舵手段18の指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う制御手段9を設ける。
(もっと読む)
車両のエンジン自動停止制御装置
【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
車両用制動支援装置
【課題】坂路にて自車両の停止中に自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止する。
【解決手段】車両用衝突回避制動支援装置1は、障害物との接近に関するリスクポテンシャルを算出するリスクポテンシャル演算部31と、走行路の勾配を検出する外乱推定部32と、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する制動力演算部40とを備える。
(もっと読む)
車両のブレーキ制御装置
【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧アクチュエータ2と、統合コントローラ9と、を備え、統合コントローラ9は、停車時モータオフ制御部(ステップS9)と、昇圧勾配制限部(ステップS15〜ステップS20)と、を有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータ21を停止し、車両停止中、VDCモータ21の停止状態を維持したままとする。昇圧勾配制限部は、停車時モータオフ制御を終了すると、ホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
ストロークシミュレータ、このストロークシミュレータを有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステム
【課題】反力シミュレータ部材の付勢力による跳ね返り抵抗感を抑制してより一層良好な操作フィーリングを得る。
【解決手段】入力軸4の入力によりシミュレータ作動ピストン14が作動してシミュレータ作動液圧室15内に発生した液圧で、第1および第2反力シミュレータピストン18,
20が下動する。このとき、第1および第2反力シミュレータスプリング19,21の付
勢力で液圧室15内の液圧が入力に基づいた液圧となり、この液圧がピストン14を介して入力軸4に反力として伝達される。ピストン20の下動でその摺動抵抗力付与部材変形作動部20aが反力シミュレータピストン摺動抵抗力付与部材29を押圧変形する。これにより、ピストン20の作動に応じて変化する摺動抵抗力がピストン20に付与される。
(もっと読む)
車両制御装置
【課題】 ペダル吸い込まれ感をより低減できる車両制御装置を提供する。
【解決手段】 ブレーキペダルBPのストローク量を検出するストロークセンサ42と、ストローク量がSTrmax未満の場合、最大回生制動力Frmaxと等しい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第1回生制動力算出部32aと、ストローク量がSTrmax以上の場合、最大回生制動力Frmaxより小さい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第2回生制動力算出部32bと、要求回生制動力Frreqに基づいて実際に発生された回生制動力の検出値である実行回生制動力Frと液圧制動力との和が車両に必要な制動力である要求総制動力Freqとなるように、要求総制動力Freqと実行回生制動力Frとの差分を要求液圧制動力Fwcreqとして算出する制動制御部32cと、を有するBCU32を備えた。
(もっと読む)
車両用制動力制御装置
【課題】車両がスプリットμ路を走行する際の前一輪のアンチスキッド制御に起因して車両に作用する余分なヨーモーメントを低減しつつ、従来の制動力制御装置の場合に比して後輪の横力が不足する虞れを低減する。
【解決手段】必要に応じて各車輪の制動力を相互に独立に制御可能な制動装置を有する車両用制動力制御装置に係る。一方の前輪に於いてアンチスキッド制御が開始され(ステップ150)、左右の路面の摩擦係数が異なる走行路に関し予め設定された条件が成立していると判定されると(ステップ200)、一方の前輪とは左右反対側の前輪の制動力の増大を抑制すると共に、左右の後輪のうち少なくとも一方の前輪とは左右反対側の後輪の制動力の増大を抑制する(ステップ500又は700)。一方の前輪とは左右反対側の前輪の制動力の増大抑制度合は後輪の制動力の増大の抑制が行われない場合の抑制度合に比して小さい。
(もっと読む)
作業車の牽引構造
【課題】被牽引車両の牽引時に牽引車両が減速しても牽引車両または被牽引車両の脱線を防ぐことができる作業車の牽引構造を提供する。
【解決手段】牽引車両1と被牽引車両2は連結棒3で連結されており、被牽引車両2は、この連結棒3を介して牽引車両1により牽引される。被牽引車両2には、被牽引車両減速手段4が設けられている。この被牽引車両減速手段4は、牽引車両1の減速時に被牽引車両2を減速することにより連結棒3の突き上げを抑制するものである。
(もっと読む)
21 - 40 / 534
[ Back to top ]