
Fターム[3D246GC14]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御時期 (1,667) | 運転者による制動時 (534)
Fターム[3D246GC14]に分類される特許
81 - 100 / 534
車両の制御装置
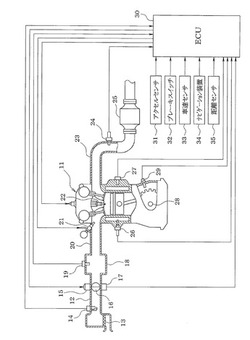
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
アンチスキッド制御装置

【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
自動二輪車用ブレーキ装置
【課題】走行環境変化に対応した前後配分にすることができるブレーキ装置を提供することを課題とする。
【解決手段】第2モード第1区間の始点から第2モード第2区間の終点までの間の途中の点Pmで、操作量に対する前輪の制動力の増加率を、変化させる。点Pmまでの操作量の増加率は、曲線の傾きα1で表すことができる。点Pm以降の操作量の増加率は、曲線の傾きα2とする。好ましくは、α1<α2に設定する。
【効果】途中までの増加率より、途中以降の増加率を大きく設定することで、操作量に車体発生源速度を一次比例させることができる。操作量に車体発生源速度を一次比例させると、制動の初期(操作量が小さいとき)においては姿勢制御優先で前後輪の制動力の変化量を小さくすることができ、制動の後半(操作量が大きいとき)においては制動作用が優先される。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
(もっと読む)
ブレーキ制御装置
【課題】 運転者に違和感を与えることなくブレーキペダル操作量に応じた制動力を得ることが可能なブレーキ制御装置を提供すること。
【解決手段】 本発明では、ブースタの倍力が無効とされる第1のストローク領域を備えた液圧制御装置に、第1のストローク領域ではドライバ要求制動力を実現するようにホイルシリンダ圧の液圧サーボを行い、第2のストローク領域では、ストローク量に対応して設定された目標ホイルシリンダ圧と目標マスタシリンダ圧との関係を維持するようにポンプや制御弁を制御することとした。
(もっと読む)
倍力装置及びこれを用いたブレーキ装置
【課題】倍力装置およびブレーキ装置において、回生協調時に液圧の変動による反力の変動を軽減してブレーキペダルの操作フィーリングを改善する。
【解決手段】ブレーキペダルで入力ロッド135を操作し、制御バルブ132で変圧室108に大気を導入し、パワーピストン106を推進してプライマリピストン160を前進させてマスタシリンダ110でブレーキ液圧を発生させる。液圧による反力の一部をリアクションディスク155を介して入力ロッド135に伝達する。プライマリピストン160に液圧を発生しない遊びストロークSを設け、反力調整バネ157Cによりプランジャ131に伝達する反力を制限する。遊びストロークSの領域で、液圧制御装置でホイールシリンダに液圧を供給して回生協調制御を行ない、反力バネ159による反力を入力ロッド133に付与する。これにより、液圧制御装置の作動によるマスタシリンダ110の液圧変動が入力ロッド135に伝達されない。
(もっと読む)
車両用ブレーキ装置
【課題】 電源の一時的な失陥でブレーキ装置の制御が不必要にシャットダウンされるのを防止する。
【解決手段】 電源71の失陥によってスレーブシリンダ42が作動不能になる異常時には、ブレーキ制御ECU72はスレーブシリンダ42およびマスタカットバルブ32,33の制御を停止し、ブレーキペダルによって作動するマスタシリンダが発生するブレーキ液圧でホイールシリンダを作動させる。ブレーキ制御ECU72は、第1監視手段M1が電源71の遮断を検出し、かつ第2監視手段M2がブレーキ制御ECU72と該ブレーキ制御ECU72とは独立に設けられた他の制御ECU73,74,75との間の通信の途絶を検出したときに、スレーブシリンダ42およびマスタカットバルブ32,33の制御を停止するので、電源71の一時的な失陥でブレーキ装置の制御が不必要にシャットダウンされるのを確実に防止することができる。
(もっと読む)
車両用ブレーキ装置
【課題】 スレーブシリンダのモータが空転したときにマスタシリンダが発生したブレーキ液圧によるバックアップが速やかに行えるようにする。
【解決手段】 スレーブシリンダ42が作動不能になる異常時には、ブレーキペダル12によって作動するマスタシリンダ11が発生するブレーキ液圧でホイールシリンダが26,27,30,31が作動する。空転検出手段は、スレーブシリンダ42のモータ44の回転速度がスレーブシリンダ42のストロークに応じて設定される基準値よりも大きいときにモータ44の空転を検出するので、モータ44の空転を確実かつ速やかに検出することができる。モータ44の空転が検出されると、制御手段がマスタカットバルブ32,33を開弁してマスタシリンダ11が発生するブレーキ液圧でホイールシリンダ26,27,30,31を作動させるので、作動不能になったスレーブシリンダ42をマスタシリンダ11で速やかにバックアップすることができる。
(もっと読む)
運転支援装置
【課題】ドライバの運転操作による目標走行経路に対する車両の追従性を向上させることができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU6は、車両の目標走行経路を生成する目標経路生成部12と、ドライバの体力を判定するドライバ体力判定部13と、ドライバの体力に応じて、アクセルペダルストロークとアクセルペダルアシスト力及びアクセルペダル反力との関係を表すアクセルペダル入出力特性を設定するアクセルペダル特性設定部15と、ドライバの体力に応じて、ブレーキペダルストロークとブレーキペダルアシスト力及びブレーキペダル反力との関係を表すブレーキペダル入出力特性を設定するブレーキペダル特性設定部16とを有している。
(もっと読む)
ハイドロブレーキ制御装置
【課題】ブレーキアシスト制御が機能している状態で、アンチロックブレーキが作動しても、所望のブレーキ制動力を維持可能とするハイドロブレーキ制御装置を提供することを目的とする。
【解決手段】運転者によるブレーキ操作部材の操作量に応じて加圧した作動流体の供給を受けて、車輪に制動力を付与するホイールシリンダと、ホイールシリンダに供給する作動流体を加圧する動力液圧源と、車輪がロックしないように作動流体のホイールシリンダへの供給を一時遮断するアンチロックブレーキと、動力液圧源で圧力が増大された作動流体をホイールシリンダに供給する場合に、アンチロックブレーキが作動すると、所定の増圧処理を行うブレーキ制御部とを備えるハイドロブレーキ制御装置とする。
(もっと読む)
ブレーキ制御装置
【課題】 ポンプの作動頻度を抑制できるブレーキ制御装置を提供する。
【解決手段】 2系統のブレーキ配管系のうちP系統に設けられ、マスタシリンダM/Cのプライマリ室15aとホイルシリンダW/Cとの間の第1ブレーキ回路(管路11,18)に配置されたゲートアウトバルブ12と、第1ブレーキ回路であってプライマリ室15aとゲートアウトバルブ12との間から分岐する還流油路部17を有する分岐油路16と、還流油路部17に設けられたストロークシミュレータバルブ27と、ストロークシミュレータバルブ27を経由しマスタシリンダM/Cからのブレーキ液が流れ込むリザーバ34と、リザーバ34を介してブレーキ液を吸入して還流油路部17から分岐油路16に吐出するポンプ35と、を備えた。
(もっと読む)
車両の制御装置
【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
走行支援装置
【課題】ドライバーの要求により合致し、ドライバーの装置のシステムへの過信を防止することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12と、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、後退時に障害物Oaとの接触を防止するようにドライバーの操作によらずに車両11の速度の制限及び減速の減速制御又は停止制御を行ない、その後に減速制御等の操作量を小さくする。このため、車両11が障害物Oaに対して減速された後に、ドライバーがさらに障害物Oaに接近したい等の理由で車両11を加速させたい状況に対応することができ、いつまでも車両11が障害物Oaに対して減速させられて、ドライバーがシステムを過信することを防ぐことができる。
(もっと読む)
車両制御装置
【課題】減速中にエンジンに対する燃料の供給を停止し、かつエンジンと駆動輪との動力の伝達を遮断する場合の制動力の変動を抑制することができる車両制御装置を提供すること。
【解決手段】エンジンと、開放することによってエンジンと駆動輪との動力の伝達を遮断するクラッチと、制御可能な制動装置と、を備え、減速時にエンジンを停止(S4)し、かつクラッチを開放する(S3)ときに、制動装置が発生する制動力を減少させる(S5,S6)。
(もっと読む)
ブレーキ制御装置
【課題】 回生協調制御時のペダルフィールの向上を図ることができるブレーキ制御装置を提供する。
【解決手段】 ブレーキ液が流入可能な液吸収シリンダ15と、マスタシリンダM/CとホイルシリンダW/Cとを接続する第1ブレーキ回路(管路11,18)とポンプPの吐出部10bと接続する第2ブレーキ回路(管路31)との接続位置と、第1ブレーキ回路上であって第2ブレーキ回路の接続位置よりもマスタシリンダM/C側に設けられたゲートアウトバルブ12との間の第1ブレーキ回路から分岐し、液吸収シリンダ15に接続する管路16と、この管路16に設けられたストロークシミュレータバルブ17と、を備える。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
ブレーキ装置及びこれを備えた軌道系車両
【課題】メンテナンスコストの低減を図ることができるとともに、常用ブレーキの故障時であっても非常ブレーキを作動させることが可能なブレーキ装置及び該ブレーキ装置を備えた軌道系車両を提供する。
【解決手段】空気バネ310の圧力に基づいて、圧縮空気源300の空気圧から非常ブレーキ時のブレーキ圧に相当する応荷重圧を生成する応荷重弁10と、常用ブレーキ時に圧縮空気源300の空気圧を出力する一方、非常ブレーキ時に応荷重圧力を出力する切換弁40と、常用ブレーキ時に切換弁40から供給される空気圧を調圧してブレーキ圧として出力するとともに、非常ブレーキ時に切換弁40から供給される応荷重圧をブレーキ圧として出力する圧力制御弁60とからブレーキ装置1を構成する。
(もっと読む)
ブレーキシステム
【課題】圧力センサを用いないブレーキシステムにおいても、温度の変化によってブレーキフィーリングに影響を与えにくいブレーキシステムを提供することを課題とする。
【解決手段】ブレーキシステムに、ブレーキ操作子12F、12Rの回動量を検出する入力側ポテンショメータ28F、28Rと、第2マスターシリンダ36F、36Rの押圧量を検出する出力側ポテンショメータ38F、38Rと、車輪制動手段のブレーキキャリパの温度又はこのブレーキキャリパの作動液の温度を検出する温度センサ42F、42Rとを設けた。
【効果】従来の2個の圧力センサを、2個のポテンショメータと1個の温度センサに置き換えた。温度センサで、ブレーキキャリパの温度又はこのブレーキキャリパの作動液の温度を検出し、この温度に基づいて制動力を補正させるようにした。結果、温度の変化によってブレーキフィーリングに影響を与えにくいブレーキシステムが提供される。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤシステムにおけるブレーキ力の増減時の応答性を簡単な構成で運転者の感覚に合うようにする。
【解決手段】ブレーキペダルのストロークを操作量として操作量制動力変換回路31に入力し、その出力信号を増加用ローパスフィルタ32と減少用ローパスフィルタ33とに入力し、各出力を最大値選択回路34により大きい方を選択し、各ローパスフィルタの出力の大きい方で制御目標値Bmaxを生成し、制御目標値Bmaxが最終的な制動力目標値となる。ブレーキ操作量に対する制動力目標値の応答遅れを、ブレーキ操作量の増加側では小さく、ブレーキ操作量の減少側では大きくすることができ、各ローパスフィルタのカットオフ周波数(時定数)を調整するという簡単な構成で、運転者に違和感の無いブレーキフィーリングを与えることができる。
(もっと読む)
81 - 100 / 534
[ Back to top ]