
Fターム[3D246GC14]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御時期 (1,667) | 運転者による制動時 (534)
Fターム[3D246GC14]に分類される特許
101 - 120 / 534
液圧ブレーキシステム
【課題】液圧ブレーキシステムの制御系の異常時の走行安全性の向上を図る。
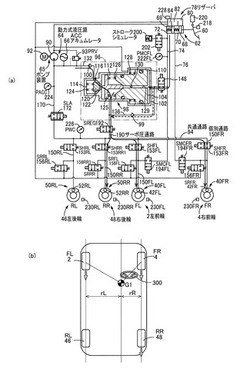
【解決手段】車両の重心G1が左右方向の中心から右側にある場合には、重心G1から右側の前後輪の接地点までのアームが、左側の前後輪の接地点までのアームより短くなる。それに対して、制御系の異常時に、メカ式増圧装置96の出力液圧が右前輪4,右後輪48,左前輪2のブレーキシリンダに供給されるため、右側の前後輪4,48に加えられる制動力の合計が左側の前後輪2,46に加えられる制動力の合計より大きくなる。その結果、車両にヨーモーメントが生じ難くすることができる。
(もっと読む)
電動車両のブレーキ制御装置

【課題】回生協調ブレーキ制御時、マスターシリンダ圧発生開始ポイントのメカバラツキ影響を排除した制動目標値を設定することにより、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。統合コントローラ9は、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、ブレーキ操作によりマスターシリンダ圧の発生が開始されるブレーキペダルストローク位置を検出し、検出された実マスターシリンダ圧発生開始ポイントでの目標減速度が、上乗せ制動分の最大値(回生ギャップ)になるように、ストローク変化に対して滑らかに変化する目標減速度特性を設定する(図4)。
(もっと読む)
ブレーキ制御装置
【課題】電動モータを駆動源とする車両用のブレーキ制御装置において、故障診断情報の不揮発性メモリへの書込み処理の確実性を高める。
【解決手段】ブレーキペダル100の操作に基づき、マスタ圧制御装置3により電動モータ20を制御し、回転−直動変換装置25を介してアシストピストン40を推進してマスタシリンダ9でブレーキ液圧を発生させる。通常は車両電源Eから電力を供給し、車両電源Eの異常時には補助電源12から電力を供給する。マスタ圧制御装置3は、故障検出時に故障診断情報を一旦、揮発性メモリに書込み、システムシャットダウン時に、その故障診断情報を不揮発性メモリに書込む。また、車両電源Eから補助電源12への切換時には、補助電源12の電力供給開始直後に揮発性メモリの故障診断情報を不揮発性メモリに書込む。これにより、故障診断情報を不揮発性メモリに確実に書込むことができる。
(もっと読む)
電動ブレーキアクチュエータ取付構造
【課題】車両用ブレーキシステムの電動ブレーキアクチュエータを、パワープラント収納室に収納して強固な部位に取り付けられる電動ブレーキアクチュエータ取付構造を提供することを課題とする。
【解決手段】操作者のブレーキ操作が入力される入力装置14と、少なくともブレーキ操作に応じた電気信号でブレーキ液圧を発生させるモータシリンダ装置16と、が車両1に備わって構成される車両用ブレーキシステムにおける電動ブレーキアクチュエータ取付構造であって、モータシリンダ装置16が、車両1の左右両側において前後方向に延設されるフロントサイドメンバ7に取り付けられることを特徴とする。
(もっと読む)
センサ異常判定装置
【課題】ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供する。
【解決手段】第1監視部102は、非接触式の第1ストロークセンサ46aの第1出力電圧を監視する。第2監視部104は、非接触式の第2ストロークセンサ46bの第2出力電圧を監視する。異常判定部122は、監視結果を受け取り、第1ストロークセンサ46aまたは第2ストロークセンサ46bに異常が生じたか否かを判定する。判定制御部124は、異常判定部122による判定処理の実行を制御する。第1監視部102には、監視可能な上限監視電圧V1が設定されている。第1電圧判定部126は、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定し、可能性があれば、判定制御部124が、異常判定部122による判定処理を停止する。
(もっと読む)
ブレーキ液圧制御装置
【課題】液圧ユニットのブラケットへの支持箇所を減らし、振動を抑制することのできるブレーキ液圧制御装置を提供する。
【解決手段】アンチロックブレーキ制御を行う液圧ユニット10を備え、車体60,61に取付けられるブレーキ液圧制御装置70において、液圧ユニット10の第1の面30dに略垂直に形成された第2の面30eを支持する第1支持部42と、第1の面30d及び第2の面30eの各々と略垂直に形成された第3の面30bを支持する第2支持部43と、第1支持部42及び第2支持部43が取付けられるブラケット41とを備え、車体60に固定するための第1固定部41gを有する第2板部41bと、車体61に固定するための第2固定部41fを有する第3板部41cとを有し、第1固定部41gと第2固定部41fと液圧ユニット10の重心とが略一直線上に位置するようにした。
(もっと読む)
車両用制動制御システム
【課題】走行路の路面摩擦係数μの変化に対する制動制御のロバスト性を向上できる車両用制動制御システムを提供すること。
【解決手段】この車両用制動制御システム1は、流体圧Pに応じた制動力を車輪11FRに付与するホイールシリンダ22FRと、車輪加速度DVWに基づいてホイールシリンダ22FRの流体圧Pを制御する制御装置4とを備えている。そして、制御装置4が、急制動の開始後かつABS制御の開始前に、所定の流体圧Pをホイールシリンダ22FRに付与して車輪加速度DVWの復帰レベルΔDVWを取得し、この車輪加速度DVWの挙動に基づいて流体圧Pの制御目標値を算出している。
(もっと読む)
ハイブリッド車両
【課題】減速回生中のシフトダウンに関し、運転者の違和感を減少し、また、電力の回収漏れを抑制すること。
【解決手段】第1及び第2変速機構と、前記第1変速機構に接続された電動機と、前記第1及び第2変速機構と断続される内燃機関と、を備えたハイブリッド車両において、運転者の制動要求中、前記電動機による減速回生を行う減速回生制御手段と、運転者の制動要求により前記減速回生制御手段が前記減速回生を行っている場合であって、前記第1変速機構により実現される所定の変速段を選択中に、前記制動要求に係る制動要求量が所定量減少した場合は前記第1変速機構により実現される、前記所定の変速段よりも低速側の変速段に切り替える一方、減少しない場合は前記所定の変速段を維持するシフト制御手段と、を備えたことを特徴とする。
(もっと読む)
電動車両の発進時ずり下がり防止制御装置
【課題】充電制限により回生制動が得られなくても、車両のずり下がりを確実に防止し得る装置を提供する。
【解決手段】充電制限中のDレンジ停車状態で瞬時t1以降、アクセル開度APO(モータトルクTTMA0)を増大させて行う発進操作中(当初はモータトルク指令値TTMA=TTMA0)、車両速度VSP≦-0.5km/hが0.1sec継続するt2に、ずり下がり防止制御を開始(flag_RSAON=1)。一方でTTMAを一定変化率β1で低下させt3に0となし、他方でブレーキトルク指令値TTBRK(ブレーキ液圧指令値TPMC)を一定変化率α1で、TTMA0と同じトルク値となるよう増大させ、摩擦制動により、ずり下がりを防止する。VSP=0が0.1sec継続する、ずり下がり防止完了時t5より、TTMAを一定変化率β2でTTMA0に復帰させ、TTBRK(TPMC)を一定変化率α2(=-β2)で0へ低下させる。
(もっと読む)
電動パーキングブレーキ装置
【課題】モータの惰性駆動による更なるケーブルへの張力付与を防止することで、アクチュエータとブレーキアッセンブリとの耐久性を向上させること。
【解決手段】ブレーキ作動を行なう場合、PWM回路により初期デューティ比を出力して電動モータを駆動し(時刻t1)、この初期デューティ比からデューティ比を上げて目標デューティ比を出力する(時刻t2)。予め設定した所定ブレーキ力よりΔL1より低い終了前目標ケーブル張力値TSにケーブルの張力が到達すると(時刻t3)、電動モータの回転数を低下させるべくデューティ比を目標デューティ比から終了前デューティ比へと下げる。ケーブル張力が所定ブレーキ力に達すると、デューティ比を0%として電動モータを停止させる(時刻t4)。
(もっと読む)
アンチロックブレーキ制御装置
【課題】ABS制御を実行する車輪の回転速度のみに基づいて、実際の路面状態に沿ったABS制御を実行することができるアンチロックブレーキ制御装置を提供する。
【解決手段】アンチロックブレーキ制御手段65は、検知された回転速度Vに基づいて算出された前輪減速度Gが第1スリップ検出閾値G1を超えることで前輪WFのロック状態を判定すると共に、乗員の操作により生じているブレーキ圧を開放制御してロック状態を解消する。ブレーキ圧の開放制御に伴って前輪WFの回転が復帰する際に発生する復帰加速度Gfに基づいて、少なくとも路面摩擦の大きさに起因すると共に自動二輪車1の停止しやすさの指標となる推定減速度Gsを導出する路面摩擦推定手段66を具備する。アンチロックブレーキ制御手段65は、推定減速度Gsに応じて目標前輪回転車速Vmを算出し、ABS制御中は回転速度Vが目標前輪回転速度Vmに収束するようにブレーキ圧を制御する。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】ドライバがブレーキアシスト制御を解除するという意思がないにも拘わらず、ブレーキペダル踏み込み量の変化に伴って目標減速度が得られなくなることを防止する。
【解決手段】ブレーキアシスト制御中に、ドライバがブレーキアシスト制御を解除するという意思がなければ、W/C圧を目標減速度相当圧P1に一定に維持する。具体的には、踏み戻し判定やブレーキオフ状態、もしくは、踏み増し判定などが為されなければ、M/C圧の変動分をキャンセルできるように嵩上げ量Prを設定することで、ブレーキアシスト制御中はW/C圧を目標減速度相当圧P1にする。そして、踏み増し判定にてブレーキペダルの踏み増しが判定されると、嵩上げ量をブレーキオフ時と比べて勾配を大きくして減少させる。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】回生協調ブレーキ制御時のショックを抑制することを目的とする。
【解決手段】動力源としてエンジン及びモータジェネレータを備えるハイブリッド車両の制御装置であって、所定の低車速域で、車速に応じた大きさのクリープトルクを駆動トルクとして発生させるクリープトルク発生手段(S10)と、回生協調ブレーキ制御時に前記回生制動トルクが0になるまでは、車速にかかわらずクリープトルクの大きさをハイブリッド車両の駆動系のバックラッシュを抑制可能な0に近い所定のガタ詰めトルクに制限するクリープトルク制限手段(S8)と、回生制動力が0になった後は、クリープトルクをガタ詰めトルクから車速に応じた大きさのクリープトルクへと変化させるときの変化率を制限するクリープトルク変化率制限手段(S9)と、を備える。
(もっと読む)
制動装置
【課題】運転者に違和感を与えることがなく、またペダル踏み間違いやシフトレバーの入力ミス等による運転者の意思に反した車両挙動を高精度に検出するとともに、最適なタイミングで最適な制動力を付与できる制動装置を提供する。
【解決手段】走行状態判定部が前進位置を判定するとともに、アクセルペダルの踏み込み速度が第1速度閾値Vf以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに所定制動力で車両を制動し、走行状態判定部が後退位置を判定するとともに、アクセルペダルの踏み込み速度が第2速度閾値Vb以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに、所定制動力で車両を制動することを特徴とする。
(もっと読む)
車両用制御装置
【課題】自動変速機により、アップシフトが行われている際に、ドライバからの制動要求があった場合に、制動要求に応じた制動力を適切に発生させることのできる車両用制御装置を提供すること。
【解決手段】モータジェネレータ20と、前記モータジェネレータと駆動輪54との間に介装され、締結要素の締結解放により複数の変速段を達成する自動変速機40と、摩擦力により制動力を発生する摩擦ブレーキと、を備える車両に対して制御信号を出力する車両用制御装置であって、ドライバからの制動要求に応じて、前記モータジェネレータによる回生制動および前記摩擦ブレーキによる摩擦制動を制御することで、回生協調制御を行う回生協調制御手段と、前記自動変速機により、アップシフトが行われている場合に、前記モータジェネレータによる回生制動を禁止する禁止手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
オートマチックトランスミッション制御装置
【課題】摩擦ブレーキと回生ブレーキとを協調させて車両を制動する協調回生ブレーキが備えられた車両において、車両の減速中にショックが発生することを防止可能なオートマチックトランスミッション制御装置を提供する。
【解決手段】摩擦ブレーキと回生ブレーキとを協調させて車両を制動する協調回生ブレーキが備えられた車両のオートマチックトランスミッションを制御する装置であって、減速中にダウンシフトの開始タイミングになったか否か判定するダウンシフト判定部(S2)と、ダウンシフトの開始タイミングになったときは、通常のシフト時間で変速した場合に、モータージェネレーターのトルクの低下に合わせて摩擦ブレーキの制動力を上昇できるか否かを判定する摩擦制動上昇判定部(S5)と、上昇できないと判定されるときは、通常よりも長い時間をかけて変速するようにダウンシフトを開始するシフト制御部(S6)と、を備える。
(もっと読む)
車両用制動制御装置
【課題】本発明は、精度良くブレーキペダルストロークセンサのゼロ値を示す基準値の補正を行うことのできる車両用制動制御装置を提供する。
【解決手段】初期学習許可判定にて初期学習開始条件が成立し、更にイグニッションスイッチがON後(i)に初期学習開始条件が成立すると初期学習を開始する(ii)。初期学習を継続し、ブレーキペダルストロークセンサの基準値がブレーキペダルのゼロ点の初期学習終了範囲内となるまで初期学習を行う(iii)。また、ブレーキペダルストロークセンサの基準値が初期学習終了範囲内で初期学習時間維持されると初期学習を終了する(iv)。正規学習開始条件が成立し、正規学習開始条件が成立すると正規学習を行う(v)。
(もっと読む)
エンジン制御装置
【課題】ブースタ負圧によるブレーキ補助力確保の確実性向上、及びアイドルストップ期間の拡大による燃費向上の両立を図ったエンジンの制御装置を提供する。
【解決手段】エンジンの吸気負圧をブースタ負圧として導入し、運転者によるブレーキペダル踏力をブースタ負圧で補助するブースタ装置と、車速がゼロになるのを待たずしてエンジンの自動停止を許可させるアイドルストップシステムと、を備えた車両に適用され、エンジンの自動停止時において、ブースタ負圧が所定の閾値TH1未満になった場合に、エンジンを自動再始動させてブレーキ補助力を回復させるブレーキ用再始動手段と、エンジンの運転時のブースタ負圧の低下量Δpave(ブレーキ補助力が低下していく履歴)に基づき、エンジンの自動停止禁止の是非を判定するアイドルストップ禁止判定手段S23と、を備える。
(もっと読む)
回生制動制御装置
【課題】本発明は、ブレーキフィーリングを向上することのできる回生制動制御装置を提供する。
【解決手段】ペダル回生最大トルク演算ブロック(B18a)では、入力された車速におけるブレーキペダル操作で発生しうる最大の回生トルクであるペダル回生最大トルクが演算される。また、ゲイン演算ブロック(B18b)では、ブレーキペダルストローク量が所定操作量以下の少ない領域においてはブレーキペダルストローク量の変化量に対するゲインの変化量を少なくし、ブレーキペダルストローク量が所定操作量より多い領域においてはブレーキストローク量の変化量に対するゲインの変化量を多くしている。そして、ペダル回生最大トルクとゲインとを乗算し、ペダル回生トルクが演算され、切換ブロックに供給される。
(もっと読む)
101 - 120 / 534
[ Back to top ]