
Fターム[3D246HA03]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931) | ストローク (854)
Fターム[3D246HA03]に分類される特許
201 - 220 / 854
電気駆動車両
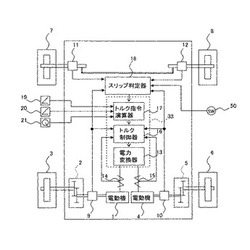
【課題】加速走行時における加速時間及び減速走行時における制動距離を短縮するとともに、電気駆動車両の振動を抑制する。
【解決手段】駆動輪3,6と、従動輪7,8と、駆動輪を駆動又は制動する電動機1,4と、電動機を制御する電動機制御器33とを備える電気駆動車両において、駆動輪及び従動輪の車輪速度を検出する車輪速度検出器9〜12と、駆動輪及び従動輪の車輪速度から駆動輪のスリップ率を演算する演算手段と、スリップ率がスリップ率判定値を超える場合に駆動輪がスリップしていると判定する判定器とを備える。判定器において、従動輪の車輪速度が設定速度より小さいとき、スリップ率判定値を、従動輪の車輪速度が設定速度より大きいときに利用される値と符号が同じで絶対値が大きい値に変更する。
(もっと読む)
液圧ブレーキ制御装置

【課題】 ドライバのブレーキ操作により発生したマスタシリンダ圧をポンプ増圧してホイルシリンダ圧を制御する際、良好なペダルフィールを実現できる液圧ブレーキ制御装置を提供する。
【解決手段】 制御弁27が設けられマスタシリンダM/CとポンプPの吸入側とを接続する第3ブレーキ回路(管路26,30)と並列に、調圧部(ストロークシミュレータバルブ16、オリフィス17)とストロークシミュレータ14とが直列に並ぶ管路15を設けた。
(もっと読む)
車両のアイドルストップ制御装置
【課題】 アイドルストップ車両において、登坂路におけるずり下がり防止を図る。
【解決手段】 運転者のブレーキ操作と車速がアイドルストップ移行条件車速閾値以下となることを含む所定のアイドルストップ条件が成立した際にエンジンを自動停止する車両のアイドルストップ制御装置において、路面勾配の大きさを検出する勾配センサ25と、運転者のブレーキ踏み込み量に応じた制動力に対し制動力増加量を付与するブレーキユニットBUFL,BUFR,BURL,BURRと、登坂路でエンジンEが自動停止した場合、検出された路面勾配が大きいほど制動力増加量をより大きくする制動力増加量設定部10cと、を備える。
(もっと読む)
制動力制御装置及び制動力制御方法
【課題】運転者がブレーキペダルの操作量を急速に減少させた際に、運転者へ与える違和感を低減することが可能な制動力制御装置及び制動力制御方法を提供する。
【解決手段】運転者によるブレーキペダルの非操作時に第一連通路を介してリザーブタンクと連通するマスタシリンダと第二連通路を介して連通し、且つ車輪に制動力を付与するホイールシリンダの液圧を、ブレーキペダルの操作量に応じてマスタシリンダで発生するマスタシリンダ圧以上の、高い液圧に増圧し、ブレーキペダルの操作量が、予め設定した操作量閾値以上から当該操作量閾値未満に減少すると、マスタシリンダ圧以上の液圧に増圧した液圧に対する、増圧量を減少させ、且つブレーキペダルの戻し方向への操作速度が予め設定した操作速度閾値以上の場合に、操作速度が操作速度閾値未満の場合よりも、増圧量の減少速度を大きくする。
(もっと読む)
自転車用回生制動制御装置
【課題】ブレーキ回生を行う制御装置において、回生制動と機械制動との間で違和感を生じにくくする。
【解決手段】回生制動制御部74は、自転車に装着可能なフロントブレーキシステムとリアブレーキシステムの変位に関連してモータ60を制御する。回生制動制御部74は、右ブレーキセンサと、左ブレーキセンサと、第1制御部75と、を備えている。右ブレーキセンサは、フロントブレーキシステムの移動位置を検出する。左ブレーキセンサは、リアブレーキシステムの移動位置を検出する。第1制御部75は、フロントブレーキシステムおよびリアブレーキシステムが変位すると、右移動位置と左移動位置とにより得られた加算位置に応じた第1回生制動力を発生するようにモータ60を制御する。
(もっと読む)
制動力制御装置及び制動力制御方法
【課題】運転者がブレーキペダルの操作量を急速に減少させた際に、運転者へ与える違和感を低減することが可能な制動力制御装置及び制動力制御方法を提供する。
【解決手段】運転者によるブレーキペダルの非操作時に第一連通路を介してリザーブタンクと連通するマスタシリンダと第二連通路を介して連通し、車輪に制動力を付与するホイールシリンダの液圧を、ブレーキペダルの操作量に応じてマスタシリンダで発生するマスタシリンダ圧以上の液圧に増圧し、ブレーキペダルの操作量が、予め設定した操作量閾値以上から操作量閾値未満に減少すると、マスタシリンダ圧以上の液圧に増圧した液圧に対する増圧量を減少させ、且つブレーキペダルの戻し方向への操作速度が予め設定した操作速度閾値以上の場合に、操作速度が操作速度閾値未満の場合よりも、第二連通路を流れるブレーキ液の流量を減少させる。
(もっと読む)
車両の制動制御装置
【課題】 機械式および電気式のブレーキ装置により車両を制動させるときにブレーキペダルにおける反力変化を適切に生じさせる車両の制動制御装置を提供すること。
【解決手段】 電子制御ユニット26は、インホイールモータ15〜18およびブレーキ機構21〜24による制動トルクの制御中において、ブレーキセンサ28によって検出されたペダル操作量を入力し車両Veを制動するために必要な要求制動トルクを決定する。そして、ユニット26は、要求制動トルクが所定値よりも大きければ、モータ15〜18による制動トルクを周期的に変動させる。一方、ユニット26は機構21〜22が発生する制動トルクをモータ15〜18による周期的に変動する制動トルクと逆位相となるように周期的に変動させる。これにより、ユニット26は機構21〜24に機械的に接続されたペダルにおける反力を周期的に変動させる。
(もっと読む)
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
電動制動装置
【課題】正常作動時のペダルシミュレート機能を有しつつブレーキ液圧を運転者の操作入力にかかわらず自動制御でき、かつ回生協調制御し得ると共に、構造を簡素化する。
【解決手段】マスターシリンダ5に、ストロークに応じて反力付与されたブレーキペダル1の空走後に変位し得る第1ピストン6と第1ピストンに向けてばね付勢される第2ピストンを設け、ブレーキペダルの変位検出値に応じてスレーブシリンダ15を電動モータ17で駆動してブレーキ液圧を発生し、マスターシリンダの両ピストン間の第1液室13を介し、また第2ピストンにより第2液室の液圧を増大して各ホイールシリンダにブレーキ液圧を供給する。適切な反力を設定でき、システム異常時には、ブレーキペダルにより両ピストンを機械的に変位させて、ブレーキ液圧を発生させることができ、従来のシミュレータ遮断弁を用いた構成のように電気的な制御を必要とせず、構成を簡素化し得る。
(もっと読む)
車両の制動制御装置
【課題】 ABS制御開始時の「G抜け感」を抑制することができる車両の制動制御装置を提供する。
【解決手段】 ABS制御の作動を予測するABS作動予測手段を設け、ブレーキコントローラ5は、ABS制御の作動が予測された場合、ABS制御の作動が予測された場合、ブレーキ液圧ユニット19の性能で決まる摩擦制動力上昇勾配に合わせた減少勾配で回生制動力をゼロまで減少させる。
(もっと読む)
電動制動装置
【課題】正常作動時のペダルシミュレート機能を有しつつブレーキ液圧を運転者の操作入力にかかわらず自動制御でき、かつ回生協調制御し得ると共に構造を簡素化し、異常時に四輪液圧バックアップを可能にする。
【解決手段】マスターシリンダ5に、ストロークに応じて反力付与されたブレーキペダル1の空走後に変位し得る大径の第1ピストン6と、第1ピストンに向けてばね付勢される小径の第2ピストンとを設け、ブレーキペダルの変位検出値に応じてスレーブシリンダ15を電動モータ17で駆動してブレーキ液圧を発生し、両ピストン間の第1液室13を介し、また第2ピストンにより第2液室の液圧を増大して各ホイールシリンダにブレーキ液圧を供給する。システム異常時には、ブレーキペダルにより両ピストンを機械的に変位させて、ピストンの径違いに応じて前後輪にブレーキ液圧を供給することができる。
(もっと読む)
車両用制動装置
【課題】回生制動による制動力を状況に応じて変えるとともに、車両の運動エネルギを好適に電気エネルギに変換できる車両用制動装置を提供することを課題とする。
【解決手段】走行用モータ3の減速比を変更可能な変速機4aを有するハイブリッド車両HVに備わり、ブレーキペダルの操作量に応じて設定される目標制動力に基づいてブレーキアシスト制御する車両用制動装置1とする。そして、走行用モータ3を回生制御して回生制動力を発生する回生ブレーキと、油圧で作動するブレーキ作動部Brで摩擦制動力を発生する油圧ブレーキと、を備え、ブレーキアシスト制御の開始条件が成立したとき、車両用制動装置1は、回生制動力が低下するように減速比を設定した後で減速比の変更を停止し、回生制動力と摩擦制動力で目標制動力を発生することを特徴とする。
(もっと読む)
制動装置、輸送用機器及び産業用機器
【課題】高い精度でディスクの減速を制御することができる技術を提供すること。
【解決手段】第1のパッドを第2のパッドに向かって移動させ、第1のパッドと第2のパッドとで挟み込んでディスクを押圧して、その回転を抑える電動アクチュエータと、前記ディスクに対するパッドの押圧力を設定するための設定信号を出力する押圧力設定部と、前記第1のパッドまたは第2のパッドに互いに異なる位置に設けられ、パッドの応力を検出する複数の圧電素子と、前記複数の圧電素子から得られた電気信号を処理して、前記ディスクに対するパッドの押圧力に対応する押圧力の検出信号を生成する信号処理部と、設定信号と検出信号との偏差を求め、この偏差に基づいて前記電動アクチュエータの操作信号を演算して出力する演算部と、を備えるように制動装置を構成する。
(もっと読む)
パーキングブレーキ制御装置
【課題】電動パーキングブレーキシステム及びアイドルストップシステムを備えた車両において、アイドルストップの解除に伴いパーキングブレーキを自動解除する際に車両が後退するおそれを低減するパーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキを電動モータで自動作動させる電動パーキングブレーキシステム、及びエンジンを自動停止させるアイドルストップシステムを備えた車両に適用され、アイドルストップの実施に伴い、パーキングブレーキを自動作動させるパーキングブレーキ制御手段(S13)と、アイドルストップを解除してエンジンを自動再始動させる要求が生じている時にパーキングブレーキを自動解除させるパーキングブレーキ解除手段(S70)と、を備える。そして、前記パーキングブレーキ解除手段は、車両の発進駆動力が所定値以上になっていることを条件(S60:YES)として、前記自動解除を許可する。
(もっと読む)
ペダル感覚シミュレータ作動装置及び遮断組立体
【課題】改善されたブレーキシステムを提供する。
【解決手段】エミュレータシリンダ202と、エミュレータシリンダ内のエミュレータ作動装置ピストン204、及びエミュレータ作動装置室222と、エミュレータ作動装置室と流体連通している入力ポート228、及び出力ポート230を含むペダル感覚シミュレータ212と、切り替えピストンと、エミュレータ作動装置ピストンに連結され、作動停止位置と作動位置との間を移動可能なポペット弁206であって、切り替えピストン208が第1の位置にあってポペット弁が作動位置にあるときに、ポペット弁が閉じて、エミュレータ作動装置室がポペット弁を通して液溜めと流体連通しないようにし、切り替えピストンが第2の位置にあって、ポペット弁が作動位置にあるときに、ポペット弁が開いて、エミュレータ作動装置室がポペット弁を通して液溜めと流体連通するようにする。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生制動力が不足する制動シーンにおいて、ポンプモータの作動を必要最小限に抑えることで、ポンプモータの耐久信頼性の向上を達成すること。
【解決手段】電動車両のブレーキ制御装置は、ブレーキ液圧発生装置1とVDCブレーキ液圧ユニット2とモータコントローラ8と統合コントローラ9を備えた。ブレーキ液圧発生装置1は、ブレーキ操作に応じた基本液圧を発生する。VDCブレーキ液圧ユニット2は、ポンプモータ21と液圧ポンプ22を有し、基本液圧の増圧・保持・減圧を制御する。モータコントローラ8は、走行用電動モータ5により発生する回生制動力を制御する。統合コントローラ9は、制動操作時、ドライバーが要求する減速度を基本液圧分と回生分の総和で達成し、不足する回生分を基本液圧の加圧分により補償する制御を行うと共に、基本液圧の加圧分による補償制御中、回生制動力が増加方向であるか減少方向であるかに応じてポンプモータ21のオン・オフ制御を行う。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力を制御することにより、ピッチ挙動やを抑制するとともに上下方向振動を適切に抑制する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、車両Ve(より具体的には車体Bo)に発生したピッチ挙動を抑制するピッチ制御の実行中において、上下加速度センサ33から信号を入力し、車体Boの上下加速度Azを検知する。そして、ユニット30は、ピッチ制御に伴って各輪11〜14に発生させる駆動力Fの分力として推定されて車体Boに入力される上下力Fzと検知した上下加速度Azのそれぞれの作用方向が同一方向(振動増幅方向)であるときには各輪11〜14に発生させる駆動力Fを低減または「0」に制御する。一方、作用方向が互いに異なる方向(振動減衰方向)であるときには、駆動力Fを、上下力Fzと上下加速度Azとを用いて決定されるゲインKを乗算して補正する。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
走行制御装置
【課題】車速制御中にドライバーによりブレーキペダルのペダル操作が行われたときに、ドライバーに違和感を与えることなく、車速制御を解除することができる走行制御装置を得ること。
【解決手段】車速制御手段により車速を減速させる制御中にドライバーによりブレーキペダル112のペダル操作が行われた場合に、ペダル操作によりマスタシリンダ111で発生されるドライバーブレーキ液圧Pdと、車速制御部131の減速度指令値Aに基づいてブレーキアクチュエータ121で発生されるアクチュエータブレーキ液圧Paとを比較して、ドライバーブレーキ液圧Pdがアクチュエータブレーキ液圧Paを上回るまで、車速制御部131からの減速指令値Aの出力を継続する。
(もっと読む)
車両駐車支援制御装置及び車両駐車支援制御方法
【課題】自車両周囲の障害物に対する運転支援をより適切に実施可能な車両駐車支援制御技術を提供する。
【解決手段】自車両周囲の障害物との距離が予め設定した制御開始距離以下となったと判定すると、その制御開始距離以下となった障害物への自車両の接近を防止して運転者の運転を支援する運転支援制御を行う際に、自車両が駐車位置に向けて移動中と判定している場合、上記運転支援制御を抑制する。
(もっと読む)
201 - 220 / 854
[ Back to top ]