
Fターム[3D246HA03]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931) | ストローク (854)
Fターム[3D246HA03]に分類される特許
61 - 80 / 854
加減速度制御装置、加減速度制御方法

【課題】アクセル操作子にブレーキ操作子の機能を統合した場合の減速操作性を向上させる。
【解決手段】操作量Saに応じて目標加減速度Gaを設定し、操作量Sbに応じて目標加減速度Gbを設定する。そして、目標加減速度Ga設定手段で設定した目標加減速度Gaと目標加減速度Gb設定手段で設定した目標加減速度Gbとを加算した目標加減速度に応じて、車両の加減速度を制御する(S104、S105)。そして、統合操作制御モードの場合(S101の判定が“No”)、操作量Saが0よりも大きな閾値thであるときには目標加減速度Gaを0とし、操作量Saが閾値thよりも小さいほど目標加減速度Gaの実数を負側に小さくする(S106)。また、操作量Sbが大きいほど目標加減速度Gbの実数を負側に小さくする(S107)。
(もっと読む)
ブレーキ制御装置

【課題】構造をより簡単化できるブレーキ制御装置を提供する。
【解決手段】回生制動装置を備えた車両に用いられるブレーキ装置であって、ブレーキ操作状態検出部5と、第1ブレーキ回路11Pと、第2ブレーキ回路19Pと、第3ブレーキ回路21FLと、第4ブレーキ回路22Pと、ポンプP、流入弁、流出弁、リザーバ24P、と第4ブレーキ回路上であって、リザーバと第3ブレーキ回路との接続位置との間に設けられ、回生制動装置の作動状態に応じて作動するカットオフ弁28Pを備えた。
(もっと読む)
電動ブレーキ制御システム
【課題】車両電源の失陥によりブレーキ操作中に電動アクチュエータへの電源電圧が低下した際、急激なブレーキ液圧低下の抑制と急激なペダル踏力増加の緩和を達成すること。
【解決手段】ドライバーによるペダル操作量を検出し、倍力モータ24をアシスト制御することで、倍力されたブレーキ液圧をマスタシリンダ68により発生させる電動倍力ブレーキ装置6を有する。この電動ブレーキ制御システムにおいて、電源電圧検出回路10と、コントローラ21と、を備える。電源電圧検出回路10は、車両電源1の電源電圧を検出する。コントローラ21は、車両電源1の失陥によりブレーキ操作中に倍力モータ24への電源電圧Vが低下した際、検出される電源電圧Vが、低電圧判定基準値V1になってから倍力機能が停止する最低作動電圧値V0になるまでの間に、ブレーキ液圧を徐々に低下させるように倍力モータ24を制御する(図4)。
(もっと読む)
ブレーキ装置
【課題】装置の大型化、高コスト化を招くことなく、急制動時に十分な制動力を応答性よく付与することができるブレーキ装置を提供する。
【解決手段】ブレーキ装置において、機械式調圧部15cは複数のパイロット圧入力ポートを有し、機械式パイロット圧発生部は複数の前記パイロット圧入力ポートのうち電動式パイロット圧発生部15bが接続されているポートとは異なるパイロット圧入力ポートに接続され、ブレーキ操作部材11の操作量に応じたパイロット液圧を発生させる。機械式パイロット圧発生部は、マスタピストン13cと同マスタピストン13cが摺動するマスタシリンダ13とを有して構成され、マスタピストン13cとマスタシリンダ13とにより形成されているマスタ室13fの液圧を、パイロット液圧として発生させる。
【選択図】 図11 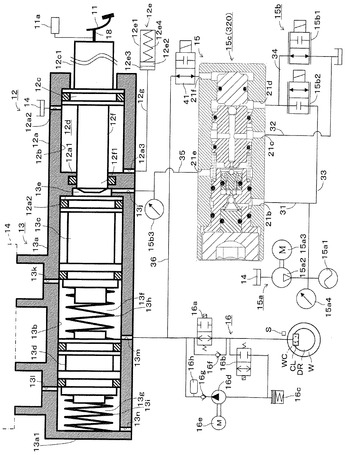 (もっと読む)
(もっと読む)
加減速度制御装置、加減速度制御方法
【課題】アクセル操作子にブレーキ操作子の機能を統合する場合の操作性を向上させる。
【解決手段】アクセルペダル8の操作位置Sに応じて車両の加減速度を制御すると共に、増加操作の場合と減少操作の場合とで、操作位置Sに応じた加減速度の制御特性を変化させる。増加操作の場合には、アクセルペダル8の操作位置Sが非操作位置S0から最大操作位置SMAXまで増加するときに、目標加減速度Gが0から予め定められた正側の最大加減速度GMAXまで増加する往路制御特性に従う。減少操作の場合には、アクセルペダル8の操作位置Sが減少操作検知時操作位置Sdから非操作位置S0まで減少するときに、目標加減速度Gが減少操作検知時加減速度Gdから予め定められた負側の最小加減速度GMINまで減少する復路制御特性に従う。
(もっと読む)
車両制動装置
【課題】より快適なフィーリングを実現し、エネルギー効率の低下と燃費の悪化を招くことを防止することができる車両制動装置を提供すること。
【解決手段】車両制動装置は、選択スイッチにより車両制御手段2cの動作が選択されないで、減速指令がある場合に、減速指令により定まる制動要求減速度が所定減速度以下である場合、ポンプが基礎油圧又は操作油圧を増圧して制御油圧を発生させる増圧制動処理を実行しない制動処理手段5aを備えることを特徴とする。
(もっと読む)
車両用ブレーキ装置
【課題】フィードバック制御からフィードフォワード制御への切替え時に、ホイールシリンダ液圧が急に下がらないように制御して運転者がブレーキ操作時に違和感を感じないようにすること。
【解決手段】モータ回転数推定部132で、FB制御からFF制御への切替え時に、FB制御目標回転数よりも余裕回転数だけ高いFF制御目標回転数に応じて徐々に上がるモータ回転数を推定し、流量演算部133で、その推定モータ回転数に応じた液圧ポンプでの汲み上げ流量に応じて徐々に増加する液圧制御弁の通過流量を推定する。制御電流補正演算部134で、電気モータがFF制御目標回転数で回転されて液圧制御弁を通過するブレーキ液が漸増しても、ホイールシリンダ液圧が変化しないように、液圧制御弁に印加する制御電流を演算して制御する。
(もっと読む)
車両用ブレーキ制御装置
【課題】制御弁を駆動しなくても、ブレーキ操作時に予め摩擦材と被摩擦材との間のクリアランスを減少させて、ブレーキの遊びが減少させられるようにする。
【解決手段】ダイアフラム233を備えた調圧リザーバ20を備え、ドライバがブレーキ操作を開始したときに、モータを駆動してポンプを作動させることでダイアフラム233を変形させ、その変形分のブレーキ液をW/C4、5側に移動させることで、ブレーキ液の遊びを減少させる。これにより、単にポンプを作動させるだけで、差圧制御弁を駆動しなくてもブレーキ操作時に予め摩擦材であるブレーキパッドと被摩擦材であるブレーキディスクとの間のクリアランスを減少させることが可能となる。
(もっと読む)
車両用ブレーキ装置
【課題】制御液圧を発生する液圧ポンプを駆動する電気モータの耐久性の向上が可能な車両用ブレーキ装置を提供すること。
【解決手段】ブレーキ操作に応じた制動力を得るための制御液圧の変化量から液圧ポンプ37,47の吐出流量を求め、求めた液圧ポンプ37,47の吐出流量に液圧制御弁31,41が正常に作動可能なリリーフ流量を加算することで、必要最小限の液圧ポンプ37,47の吐出流量を求めている。液圧ポンプ37,47は電気モータMにより駆動されるので、求めた必要最小限の液圧ポンプ37,47の吐出流量は、電気モータMの最低必要回転数に相当する。よって、必要制御液圧に達した後は、電気モータMの回転数を高回転から低回転に低減させることができるので、電気モータMの耐久性を向上させることができる。
(もっと読む)
ストロークシミュレータおよびそれを用いた車両用ブレーキ装置
【課題】反力特性のストロークの速度依存性の影響を抑制できるストロークシミュレータを提供する。
【解決手段】ピストン2aの外周面とシリンダ2bとの間にシール部材2aeを配置し、ピストン本体2aaの外周面と両シール部材2aeおよびシリンダ2bの内壁面によって構成される空間内に機能性流体2eを配置する。そして、ピストン2aの移動と共に機能性流体2eも移動させられるようにする。このような構成において、ピストン2aとシリンダ2bとの間に配置した機能性流体2eの粘度を磁場もしくは電場によって制御し、シリンダ2bの内周面を対向面としたせん断抵抗に基づいてブレーキペダル1のストロークに対する反力を発生させる。
(もっと読む)
ブレーキ制御装置
【課題】回生制動力から摩擦制動力へのすり替えの応答性をより高めることができるブレーキ制御装置を提供する。
【解決手段】ブレーキ回路(管路22P,22S,25FL,25FR)上であってソレノイドアウトバルブ26FL,26FRよりもポンプPの吸入部10aに設けられると共に、ブレーキ回路(管路21P,21S,22P,22S)に接続するリザーバ24P,24Sと、ポンプMP、MSが回転駆動されているときに吐出弁20P,20Sからのブレーキ液の吐出を制限するポンプ吸入遮断バルブ29P,29Sと、を備えた。
(もっと読む)
隊列走行制御装置
【課題】製造コストの増加を抑えつつ、先頭車両におけるフルブレーキ制動時の隊列走行の安定化を図ることができる隊列走行制御装置を提供することを目的としている。
【解決手段】手動又は自動運転される先頭車両1aに後続車両1bを自動追従させる隊列走行制御装置において、前走車両1aにおけるブレーキチャンバ32に加圧される最大エア圧よりも、自車両1bにおけるブレーキチャンバ32に加圧される最大エア圧を高い値に設定する調圧弁(比例制御弁)34aと、調圧弁34aを迂回するバイパス通路34eと、を備えたエアブレーキ手段(エアブレーキシステム)20a,20bと、隊列走行時、調圧弁34aを介してエアをブレーキチャンバ32に供給し、非隊列走行時、バイパス通路34eを介してエアをブレーキチャンバ32に供給するように切り替える隊列走行制御手段(統合コントローラ)10と、を備えた。
(もっと読む)
液圧ブレーキシステムおよび液圧ブレーキ制御方法
【課題】2系統の前後配管において、液圧系統および電気系統の少なくとも一方に異常が発生しても制動距離が延びるのを抑制する。
【解決手段】液圧系統および電気系統の両正常時、第1および第2電磁開閉弁14,15
が開き、第3および第4電磁開閉弁18,19が閉じて前後配管となる。ブレーキ液が、
左右前輪ブレーキシリンダ8,9に対して第1系統で、また左右後輪ブレーキシリンダ1
0,11に対して第2系統で供給・排出される。液圧系統または電気系統の異常時、開閉
弁14,15が閉じ、開閉弁18,19が開いて、X配管となる。ブレーキ液が、左前輪ブレーキシリンダ8と右後輪ブレーキシリンダ11に対して第1系統で、また右前輪ブレーキシリンダ9と左後輪ブレーキシリンダ10に対して第2系統で供給・排出される。
(もっと読む)
ブレーキ倍力装置
【課題】 ブレーキ倍力装置とホイルシリンダとの間にブレーキ液圧制御ユニットが介在したとしても、良好なペダルフィーリングを得ることが可能なブレーキ倍力装置を提供すること。
【解決手段】 液圧制御ユニットの作動時と非作動時とで倍力装置の制御を異ならせ、液圧制御ユニットが作動したとしても入力部材の変位が小さくなるように制御することとした。
(もっと読む)
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置
【課題】磁気式回転角検出装置に外乱磁界が作用して回転角検出誤差を生じる状態を的確に判定すること。
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
(もっと読む)
ブレーキ装置
【課題】ブレーキ装置において、ノックバックによる応答性の低下を防止しつつ、ディスクロータ及びブレーキパッドの偏摩耗を防止する。
【解決手段】通常は、ブレーキペダル19の操作によってマスタシリンダ4で発生した液圧をディスクブレーキ2に直接供給して制動力を発生させる。また、コントローラ14によって液圧ポンプモータ7を作動させてディスクブレーキ2に液圧を供給することによって制動力を発生させることができる。急旋回等によってノックバックが生じた場合、ピストン16の後退を許容することにより、ブレーキパッド17及びディスクロータ18の偏摩耗を防止する。その後、ノックバックの要因が解除されたとき、コントローラ14によって液圧ポンプモータ7を作動させ、ピストン16を前進させてパッドクリアランスを調整することにより、応答性の低下を防止する。
(もっと読む)
ストロークシミュレータ、このストロークシミュレータを有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステム
【課題】ストロークシミュレーション機能の作動開始を一層スムーズに行うことで良好なペダルフィーリングを得るとともに、ストロークシミュレータをコンパクトに形成する。
【解決手段】ストロークシミュレータであるペダル感覚シミュレータ部3は、入力が加えられてストロークする入力軸4と、入力軸4のストロークによりストロークするシミュレータ作動ピストン14と、シミュレータ作動ピストン14のストロークにより、入力軸4のストロークに基づいた反力をシミュレータ作動ピストン14に加えるシミュレータ作動液圧が発生されるシミュレータ作動液圧室15と、シミュレータ作動液圧室15に作動液を供給、排出制御することでシミュレータ作動液圧を入力軸4のストロークに基づいて制御する液圧作動制御装置28とを有する。
(もっと読む)
駆動装置および駆動制御方法
【課題】制動装置の摩擦材の状態を精度高く推定し、推定された摩擦材の状態に基づいて車両の駆動力を適切に制御する。
【解決手段】ECUは、回生制動パワーPrgを算出するステップ(S100)と、発熱量Jを算出するステップ(S102)と、磨耗量ABを算出するステップ(S104)と、磨耗量ABがしきい値AB(0)よりも大きい場合に(S106にてYES)、駆動力制限制御を実行するステップ(S108)と、乗員に通知するステップ(S110)と、磨耗量ABがしきい値AB(0)以下である場合に(S106にてNO)、通常駆動力制御を実行するステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
制動機構の作動状態判定装置
【課題】固着の発生した制動機構の作動状態を速やかに判定し、判定した作動状態を報知する制動機構の作動状態判定装置を提供する。
【解決手段】作動状態判定装置20の電子制御ユニット21は、ブレーキペダルストローク量検出センサ22によって検出されたブレーキペダルストローク量Hbとブレーキ液圧検出センサ23によって検出されたブレーキ液圧Pbとを入力する。そして、ユニット21は、入力したストローク量Hb及びブレーキ液圧Pbが、運転者によるブレーキペダルBの操作に伴って摩擦パッド13が固着の発生した状態によりディスクロータ11の摩擦面に変位する状況に応じて区画された固着領域に含まれるか否かを判定する。この判定により、ストローク量Hb及びブレーキ液圧Pbが固着領域に含まれるときは、ユニット21は、報知装置24を介して運転者に固着の発生した作動状態を報知する。
(もっと読む)
61 - 80 / 854
[ Back to top ]