
Fターム[3D246HA11]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157)
Fターム[3D246HA11]の下位に属するFターム
運転者の操舵状態 (1,067)
前輪タイヤ舵角 (59)
前輪タイヤ舵角速度、角加速度 (1)
後輪タイヤ舵角 (17)
後輪タイヤ舵角速度、角加速度
Fターム[3D246HA11]に分類される特許
1 - 13 / 13
運転支援装置
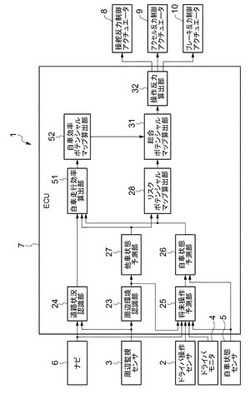
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
車両の制御装置

【課題】自動車等の車両において、適切なタイミングで運転支援制御を実行する。
【解決手段】車両の制御装置は、車両が停止する際の状況を検出する状況検出手段130と、車両が停止する際の運転者による減速タイミングを検出する減速検出手段140と、状況及び減速タイミングを互いに関連づけて学習を行う学習手段120と、学習後に、走行中の車両が学習された状況に近い状態となったことを認識する状況認識手段150と、状況に近い状態であることが認識された場合に、学習された状況に関連づけられた減速タイミングに応じて運転支援制御を行う運転支援制御手段160とを備える。
(もっと読む)
車両緊急停止装置
【課題】車両緊急停止装置に関し、乗客の誤りや故意で作動することなく、運転者の異常を検知したときに限り乗客の応答動作に基づいて車両を自動的に緊急停止することができるようにする。
【解決手段】運転者の異常を検知する運転者状態検知手段10と、運転者状態検知手段10が運転者の異常を検知したときに運転者の異常を車内及び車外に報知する車内用報知手段3及び車外用報知手段6,7と、乗客の応答動作に基づいて乗客の車両停止要求を検知する乗客側停止要求検知手段4,5と、車両を自動的に制動させる自動制動手段8と、運転者状態検知手段10によって運転者の異常が検知され且つ乗客側停止要求検知手段4,5によって乗客の車両停止要求が検知されたときに、緊急停止の必要があると判断して自動制動手段8に制動指示を行なう制御手段20とを備える。
(もっと読む)
制動シミュレーション装置
【課題】ABS制御ユニットの制御パラメータであるスリップ率を容易に設定変更を可能とする制動シミュレーション装置を提供する。
【解決手段】車両の運動を表現する車両モデルと、車両モデルとの情報の受渡しによりタイヤの運動を表現するタイヤモデルとを有するソフトウェアと、車両モデルと情報の受渡しを行う油圧系部品と、車両モデルからの情報に応じて油圧系部品を制御するABS制御ユニットとを有するハードウェアとを備え、車両モデルが有する情報のうち車両モデルから出力される車体速度と車輪回転速度とに応じて補正した補正車輪回転速度をABS制御ユニットに供給する補正手段をさらに備え、補正手段が車体速度と車輪回転速度に基づいて算出されるスリップ率をデータマップにより補正して補正スリップ率を求め、この補正スリップ率に基づいて補正車輪回転速度を算出して、ABS制御ユニットに出力するようにした。
(もっと読む)
車両の走行制御装置
【課題】 現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供する。
【解決手段】 緊急地震速報を受信し、地震対応制御を行う場合において、アクセルペダル操作量APが増加するときは、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APが補正され、補正アクセルペダル操作量APCが算出される。補正アクセルペダル操作量APCに応じてエンジンのスロットル弁開度を制御するスロットルアクチュエータ31の駆動制御が行われる。ブレーキペダル操作量BP及びステアリングホイールの操舵角STについても、ほぼ同様の処理により補正ブレーキペダル操作量BPC及び補正操舵角STCが算出される。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】
車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、車間制御ECU20がACC制御を実行しているときに、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に車間制御ECU20は、運転者のアクセル操作があったときは加速抑制制御を続行し、当該アクセル操作後に再度のアクセル操作があり、運転者が居眠りや意識低下の状態にないことが明らかであるときは加速抑制制御を解除する。これにより、安全性を確保しつつ運転者に与える違和感を軽減することができる。
(もっと読む)
車両安定化制御装置
【課題】車両がカーブを安定して通過できないと予測される場合において車両を効果的に減速し得るアンダステア抑制制御を達成する車両安定化制御装置を提供すること。
【解決手段】ナビゲーション装置の地図情報に基づくカーブ形状と、現在の車速とに基づいて、カーブ進入前後において、車両がカーブを安定して通過できる可能性(Fg)が判定される。車両がカーブを適切に通過できると判定された場合(Fg=0)、アンダステア抑制制御の開始しきい値Kjが大きい値(デフォルト値K2)に設定され、且つ、車両のヨー特性が重視されるように各車輪の制動力が配分される第1特性(デフォルト特性Bm**)が選択される。一方、車両がカーブを適切に通過できないと判定された場合(Fg=1)、しきい値Kjが相対的に小さい値(K1)に調整され、且つ、車両の減速特性が重視されるように各車輪の制動力が配分される第2特性(Bg**)が選択される。
(もっと読む)
運転支援装置
【課題】操舵力制御と制駆動力制御との制御分担比を適切に設定する運転支援装置を提供する。
【解決手段】自車両前方の環境情報に基づいて自車両を操向する運転支援装置を、自車両前方の環境を認識する環境認識手段110と、環境認識手段を用いて自車両の目標操向量を算出する目標操向量算出手段140と、操舵輪タイヤが発生するタイヤ力を算出するタイヤ力算出手段170と、操舵輪タイヤの限界タイヤ力を推定する限界タイヤ力推定手段167と、操舵機構に付与される操舵力を制御する操舵力制御手段200と、左右輪の制駆動力差を制御する制駆動力制御手段190と、目標操向量を所定の制御分担比で割り振ることにより操舵力制御手段の目標操舵力及び制駆動力制御手段の目標制駆動力差を設定するとともに、タイヤ力の限界タイヤ力への接近に応じて、制駆動力制御手段の操舵力制御手段に対する制御分担比を増加させる制御分担比設定手段180とを備える構成とする。
(もっと読む)
作業車両
【課題】作業習慣や好みに応じて作業を選択する場合、煩わしい操作に時間を空費する課題を解決する。
【解決手段】少なくとも四輪駆動の使用の有無、旋回時におけるブレーキ力、後進時に作業機を自動的に上昇させるバックアップ制御の使用の有無の組み合わせから構成した複数の作業モードを、スイッチのON、OFF操作で切替選択ができる構成としている作業車両において、作業習慣や好みに基づいて使用する作業モードを、予め選択して登録できる構成とし、この登録した内容を選択することにより、予め登録している作業モードが自動的に設定される構成としたことを特徴とする作業車両の構成とする。
(もっと読む)
衝突防止支援装置
【課題】最適なタイミングで自動ブレーキを開始する衝突防止支援装置を提供することを目的とする。
【解決手段】車両の周囲に存在する障害物と車両との衝突を予測する衝突予測手段と、運転者が把持するステアリングホイールのリム部の把持状態を検出する把持状態検出手段と、障害物と車両とが衝突すると予測された場合、運転者の操作に依らない自動的な制動動作を開始する自動ブレーキタイミングを把持状態検出手段により検出された把持状態に応じて決定する自動ブレーキタイミング決定手段と、自動ブレーキタイミング決定手段により決定された自動ブレーキタイミングで制動動作を実行する制動手段とを備える衝突防止支援装置。
(もっと読む)
車両制御装置
【課題】電動パワーステアリング装置等のタイヤに発生する力を測定可能な装置から得られる車両の走行状態情報を用いて車両挙動を制御する場合に、各走行制御装置おいて車両の挙動を連続的に制御することのできる車両制御装置を得る。
【解決手段】電動パワーステアリング制御装置8が、実路面反力トルク検出器15と、ハンドル操舵角検出器18と、車速検出器11と、規範路面反力トルク演算手段19と、実路面反力トルク信号及び規範路面反力トルク信号に応じて車両の走行状態を判定する車両挙動判定手段21と信号出力手段(通信手段)30を備え、車両挙動判定結果だけでなく、その元信号である実路面反力トルク信号及び規範路面反力トルク信号をあわせて他の走行制御装置に出力することにより、制御量の変動がステップ的にならず、連続的な制御となり、運転者に違和感を与えない。
(もっと読む)
車輌の走行制御装置
【課題】乗員の車輌走行嗜好や運転者の運転意図に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分し、車輌の走行を適正に且つ効果的に制御する。
【解決手段】車輌を安定的に走行させるための車輌の目標ヨーモーメントMtが演算され(S20)、運転者特定ボタンの操作に基づき運転者が特定され(S130)、特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され(S140)、制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され(S150)、配分率ωs1、ωbに基づき転舵角制御の目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbが演算され(S160)、それぞれ目標ヨーモーメントMts及びMtbに基づき転舵角可変装置24及び制動装置36が制御される(S400〜430)。
(もっと読む)
航空機の電気ブレーキシステムのための自動ブレーキインターロック
航空機のための電気自動ブレーキインターロックシステムは、ブレーキの不用意な(命令されていない)適用を防止する自動ブレーキ電力インターロックメカニズムを含む。自動ブレーキ電力インターロックは、自動ブレーキ作動データが正当な自動ブレーキ適用条件を示さない際はいつでも、ブレーキアクチュエータから動作電力を取除く。インターロック処理は、不用意な自動ブレーキコマンドが生成された場合でも、ブレーキアクチュエータが当該不用意な自動ブレーキコマンドに基づき動作することができないように自動ブレーキコマンド処理と並行して行なわれる。この点において、ブレーキアクチュエータは、以下の2つの動作が同時に起こらないならば、ブレーキを自動的に適用することができない。すなわち、動作電力が、電気ブレーキアクチュエータを有効にするよう与えられる場合と、正当な自動ブレーキ適用条件に応答して自動ブレーキ作動制御が命令される場合とである。 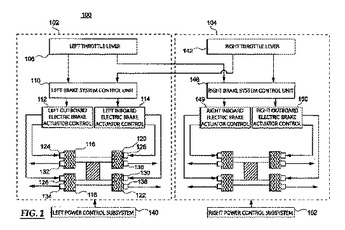 (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]