
Fターム[3D246HA12]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157) | 運転者の操舵状態 (1,067)
Fターム[3D246HA12]の下位に属するFターム
ハンドル舵角 (864)
ハンドル舵角速度、角加速度 (60)
ハンドル操舵トルク(操舵力) (107)
ハンドル戻し操作 (8)
Fターム[3D246HA12]に分類される特許
1 - 20 / 28
車両用操舵装置
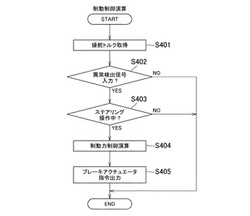
【課題】電動パワーステアリング装置の異常によるアシスト停止後もステアリング操作により車両の旋回を継続できる車両用操舵装置を提供する。
【解決手段】ABS装置30は、電動パワーステアリング装置1のECU11の制御状態量である操舵トルクτを取得する(ステップS401)。異常検出信号Spsfの入力があるか否かを判定し(ステップS402)、異常検出信号Spsfの入力がある場合(ステップS402:YES)には、続いてステアリング操作中であるか否かを判定する(ステップS403)。ステアリング操作中であると判定した場合(ステップS403:YES)には、受信した操舵トルクτに基づき、所定の転舵輪7に付与する制動力を演算する(ステップS404)。ここで、通常時の制動力に演算された制動力分が補正される。そして、その制動力を制御指令として出力(ステップS405)し、ブレーキアクチュエータ31を制御する。
(もっと読む)
車両旋回挙動制御装置

【課題】ステア特性に影響を与える左右輪間に作用させるべき差動制限力を調整する差動制限手段と、車輪への制動力を調整するブレーキ装置とを協調制御することで、車両の走行状態に関わらず、良好な車両の姿勢制御を行う。
【解決手段】前後左右輪を備えた車両1に付加すべき要求ヨーモーメント演算手段41、前輪または後輪の左右輪に対する駆動力を調整する第1のヨー運動調整手段、前輪または後輪の少なくとも一方における左右輪に対するブレーキ装置の制動力を調整する第2のヨー運動調整手段33、車両の旋回時の旋回内輪スリップ検出手段43、ヨー運動調整手段を制御する車両の旋回状態制御手段44を有し、旋回状態制御手段は、スリップ検出手段の検出結果に基づき、第1のヨー運動調整手段による駆動力差の調整と第2のヨー運動調整手段による駆動力差の調整を行い、要求ヨーモーメントへの第1および第2のヨー運動調整手段の寄与率を制御する。
(もっと読む)
衝突回避装置
【課題】本発明は、運転者が意図しない進路変更において、対象物を回避し、当該対象物との衝突を未然に防止することのできる衝突回避装置を提供する。
【解決手段】ドライバによりステアリングが操作され(S10)、ドライバによりウインカーレバーが操作されないと(S12)、自車両の進路予測を行い(S14)、自車両の走行している走行レーンが認識不可能な場合(S16)、或いは自車両の走行している走行レーンが認識可能であってもドライバのステアリング操作により走行レーンを逸脱する虞がない場合(S24)に自車両の進路上に衝突対象物があれば(S18)、スピーカより警報を発声し(S20)、更に衝突対象との衝突を回避するように操舵アシスト及びブレーキ操作アシストを作動する(S22)。
(もっと読む)
運転支援装置
【課題】ドライバの運転操作による目標走行経路に対する車両の追従性を向上させることができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU6は、車両の目標走行経路を生成する目標経路生成部12と、ドライバの体力を判定するドライバ体力判定部13と、ドライバの体力に応じて、アクセルペダルストロークとアクセルペダルアシスト力及びアクセルペダル反力との関係を表すアクセルペダル入出力特性を設定するアクセルペダル特性設定部15と、ドライバの体力に応じて、ブレーキペダルストロークとブレーキペダルアシスト力及びブレーキペダル反力との関係を表すブレーキペダル入出力特性を設定するブレーキペダル特性設定部16とを有している。
(もっと読む)
自動ブレーキ装置
【課題】自動ブレーキの不要な作動をより早い段階で抑制する。
【解決手段】ブレーキ機構2を作動させるアクチュエータ3と、アクチュエータ3の作動を制御する制御手段1とを備えた自動ブレーキ装置において、車両の前方を走行する先行車両の情報を検出する車両前方情報検出手段4,5と、前方情報に基づき車両と先行車両とが衝突する可能性を予測する衝突予測手段1aと、前方情報に基づき、先行車両が車両の走行領域から外れるか否かを予測する先行車両走行予測手段1bと、車両と先行車両とが衝突を回避できるか否かを判定する衝突回避判定手段1cと、を備える。制御手段1は、衝突予測手段1aにより衝突可能性があると予測されたら、衝突回避判定手段1cにより衝突を回避できると判定されない限りアクチュエータ3を作動させ、衝突を回避できると判定されたら、アクチュエータ3を非作動にする。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】簡単な構成のブレーキ圧発生回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動することで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、旋回内側に対応する左小旋回制御弁63または右小旋回制御弁64の一方を弁開状態に制御する。これらの制御弁63または64の一方を経て、小旋回用ポンプ57から吐出して小旋回圧供給通路60に供給するブレーキ圧油を、電磁比例リリーフ弁62によって無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御し、旋回内輪側に対応する左ブレーキ回路41または右ブレーキ回路42の一方に供給する。
(もっと読む)
車両制御装置
【課題】ドライバの走行特性に合致した逸脱判定を行うことが可能な車両制御装置を提供する。
【解決手段】車両制御装置1では、走行軌跡情報取得センサ2によって、車両10と該車両10の一側方側における認識可能な白線Lとの間の距離Xが検出される。そして、ECU5により、距離Xの平均値μ及び分散値σに基づいて、車両10が一側方側と反対の他側方側に移動した際の車両10の逸脱判定が行われる。これにより、車両制御装置1によれば、ドライバの走行軌跡の特徴を逸脱判定に好適に反映させることができる。
(もっと読む)
運転学習システム及び運転支援システム
【課題】車両の運転者が期待する制御を行う。
【解決手段】運転学習システム(10)は、車両(1)に搭載され、車両の運転者に係る運転挙動を学習する運転学習システムである。該運転学習システムは、車両が交差点を通過中であり、且つ車両が交差点を右折又は左折することを条件に、車両が交差点を右折又は左折し始めた後に、(i)運転者が車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めた時点における車両の交差点内の位置である第1位置、及び(ii)運転者がアクセルペダルを踏下し始めた時点における車両の交差点内の位置である第2位置を記録する記録手段(109)と、記録された第2位置から記録された第1位置を差し引いた差分を計算する計算手段(109)と、計算された差分と閾値とを比較した結果に応じて、運転挙動を学習する際に記録すべき項目を変更する変更手段(109)とを備える。
(もっと読む)
車両制御装置
【課題】自動制御運転の不可能な道路で自動制御運転で運転を行うのを防止することができる車両制御装置を提供する。
【解決手段】車両制御装置1は、車両の現在地を検出し、位置検出精度が所定値以下である地点を識別する特定情報を取得し、特定情報が付与されている地点が有ることを取得したとき、自動制御運転を回避すべき処理を実行するナビゲーション装置3と、検出された現在地に基づいて、道路状態に応じて前記車両の自動制御運転を行う制御装置2とを備える。
(もっと読む)
衝突安全装置
【課題】本発明は、障害物が存在するエリアを走行する場合でも円滑な走行を可能とする衝突安全装置を提供することを課題とする。
【解決手段】障害物と衝突の可能性のある部位Bに衝突吸収構造を有する移動体に搭載される衝突安全装置1であって、移動体の周辺の障害物を検出する障害物検出手段10,31と、障害物検出手段10,31で障害物を検出した場合に減速制御を行う制御手段33とを備え、制御手段33は、減速制御を行うときの速度の制御値を少なくとも移動体の障害物との衝突部位Bの衝撃吸収性能に応じて設定することを特徴とする。
(もっと読む)
同軸二輪車
【課題】より安全性を高めた同軸二輪車を提供すること。
【解決手段】本発明にかかる同軸二輪車10は、搭乗者が足を載せるステップ1a,1bを有し、同軸上に配置された一対の車輪2a,2bを駆動制御することにより、移動する。当該同軸二輪車10は、搭乗者の膝の屈伸状態を検出し、検出信号を出力する屈伸状態検出機構8と、検出信号に含まれる屈伸状態の情報に基づいて、減速させる減速手段として機能する制御部5やブレーキ11を備えている。
(もっと読む)
走行支援装置
【課題】運転者の意思に応じた走行制御を実行できる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車両周辺の環境情報から特定された制御に基づいて自車両が実行可能な走行制御が抽出され、その走行制御が複数存在する場合にその制御因子及び制御内容が運転者に対して表示される。そして、運転者が意図する一の走行制御の選択を受け付け、その一の走行制御が自車両において優先的に実行される。これにより、例えば追従対象や信号機等といった制御因子が複数存在する場合であっても、追従対象の変更や速度の変更等といった走行制御が自動で実行されずに、運転者の意思を確認してから実行されることになる。従って、運転者が不測の車両挙動に違和感を覚えることなく、運転者の意思に応じた走行制御の実行が可能となる。
(もっと読む)
選択的非線形最適化演算による車輌運転制御方法
【課題】電子制御装置のコンピュータに高負荷をかける非線形最適化演算制御等の評価関数制御を、電子制御装置によるその他の車輌運転制御を損なうことなく、且つ電子制御装置のコンピュータのグレードアップに頼ることなく実現する。
【解決手段】車輌の走行性能に関与する複数のパラメータについて評価関数の演算により得られた値にて時系列的に行う制御を、前記複数のパラメータの少なくとも一つがそれについて設定された閾値の一方の側にあるときのみ行う。
(もっと読む)
車両制御装置
【課題】運転者の旋回意思を判定し、旋回に必要な制御を早期に開始可能とする車両制御装置を提供する。
【解決手段】車輪の偏向時に車輪が路面から受ける反力トルクに基づいて運転者の旋回意思を検出する旋回意思検出器2と、車両の旋回運動を司るアクチュエータ4を制御するブレーキ制御器3とを備え、ブレーキ制御器3は、旋回意思検出器2の出力に基づき、アクチュエータ4の駆動を制御することにより、車輪の偏向時に路面から受ける反力トルクから運転者の旋回意思を検出し、運転者のハンドル操作もしくは車両状態量が発生する以前から制御を開始し、制御を早期のタイミングで実施する。
(もっと読む)
車両の運転支援装置
【課題】ドライバ固有の運転特性を考慮し、個々のドライバに見合った自然で違和感が無く、且つ必要充分な運転支援を与える。
【解決手段】カーブ曲率分散値演算部5aで演算したカーブ曲率分散値Veとハンドル角分散値演算部5bで演算したハンドル角分散値Vθとの相関関係からドライバ固有の特性係数Kvを特性係数演算部5cで演算し、この特性係数Kvに基づいて障害物に対する回避操作を開始するまでのドライバ固有の操作余裕時間Trをドライバ操作余裕時間設定部6で設定する。そして、警報判断部8において、ドライバ固有の操作余裕時間Trと回避操作余裕時間演算部7で演算した車両制御システムの回避操作余裕時間Tcとを比較し、Tc<Trのとき、警報装置9に信号を出力し、ドライバに警報を与える。これにより、運転支援装置1は、個々のドライバに見合った自然で違和感の無い、必要充分な運転支援とすることができる。
(もっと読む)
自動制動制御装置
【課題】不要な自動ブレーキの介入を排除しつつ、自動制動制御の実行領域を衝突回避限界距離以遠にも拡大することができる自動制動制御装置を提供する。
【解決手段】制動制御ユニット5は、制動制御が一旦終了した後は、設定時間(禁止時間)が経過するまでの間、拡大制動制御の実行を禁止する。これにより、自動制動制御の実行領域を衝突回避限界距離よりも自車両1側に拡大した場合にも(すなわち、本格制動制御に加えて拡大制動制御を設定した場合にも)、短時間内に不要な自動ブレーキの介入と解除とが繰り返し行われる等してドライバ等に違和感を与えたり車両挙動の不安定化を招く等の不具合を的確に抑制することができる。
(もっと読む)
運転支援装置
【課題】操作の煩わしさを抑制する共に、運転者の誤操作を防止することができる運転支援装置を提供する。
【解決手段】運転支援装置1では、ECU4によって、ブレーキアシスト機能及びクリープコントロール機能の作動可能性が取得され、取得された作動可能性に基づいて停止維持機能又はクリープコントロール機能の何れか一方がONとされる。これにより、運転支援装置1によれば、ブレーキ操作がなされていない状態において、ブレーキホールド機能又はクリープコントロール機能の何れかが、作動可能性に応じて自動的にONとされることとなる。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性を高める車両用制御装置においても、運転者の意図するドリフト走行などの車両を滑らせる挙動を実現できる車両用制御装置を提供する。
【解決手段】マイコン10に含まれる目標ヨーレート設定部12は、舵角センサ2からの舵角θと車速センサ4からの車速Vと各種定数とに基づき車両の走行安定性を高めるための目標ヨーレートYtを決定し、ヨーレートセンサ8により検出される車両の実ヨーレートYsがこの目標ヨーレートYtに一致するようFB制御演算部16は指令値D’を算出し、ゲイン乗算部18はアキシャル力センサ3からのハンドル垂直方向に加わるアキシャル力Faに応じて適宜変更されるゲインGを指令値D’に乗算した指令値Dを配分装置駆動回路20に与える。このことにより、運転者の意図に応じて走行安定性を抑制しドリフト走行などを実現可能とする。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】一般道路は勿論、高速道路においても最適な速度でカーブを走行できる新規な車両用走行制御装置および車両用走行制御方法の提供。
【解決手段】カーナビゲーションシステム20によって誘導走行している自車両の走行路前方の道路情報を検出し、その走行路が一般道路であるときは、先行車に対する追従走行を優先し、高速道路であるときは、前記カーナビゲーションシステム20のナビゲーション情報から得られる目標車速と追従走行時の車速を比較し、低いほうの車速を選択して(セレクトロー)走行するように制御する。これによって、一般道路は勿論、高速道路においても的確な速度でカーブを走行できる。
(もっと読む)
車両挙動制御装置
【課題】 車両の絶対的な挙動と、相対的な挙動の両方を適正に制御可能な車両挙動制御装置を提供すること。
【解決手段】 ブレーキペダルとは別に設けられマスタシリンダを作動させてホイルシリンダを加圧する第1の昇圧部と、マスタシリンダを介さずにホイルシリンダを加圧する第2の昇圧部と、昇圧部を制御するコントロールユニットと、を備え、コントロールユニットには、自車両と周囲との相対的な関係に基づく第1の動作指令と、自車両の絶対的な挙動に基づく第2の動作指令とが入力され、入力された指令が第1の動作指令の場合、第1の昇圧部を作動させると共に、入力された指令が第2の動作指令の場合、第2の昇圧部を作動させ、第1の動作指令が入力されて前記第1の昇圧部が作動しているときに第2の動作指令が入力された場合、第1の昇圧部に加え、第2の昇圧部を作動させる。
(もっと読む)
1 - 20 / 28
[ Back to top ]