
Fターム[3D246HA20]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157) | 後輪タイヤ舵角 (17)
Fターム[3D246HA20]に分類される特許
1 - 17 / 17
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
車両運動制御システム

【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
運動量制御装置
【課題】 制御対象の運動状態が安定するように設定されたフィードバックゲインを用いて制御対象の運動量をフィードバック制御する運動量制御装置を提供すること。
【解決手段】 運動量制御装置は、複数のアクチュエータのうちの一つのアクチュエータを単独で作動させることにより制御対象の運動量をフィードバック制御した場合に用いる最適フィードバックゲインを、複数のアクチュエータのそれぞれが単独で作動した場合についてそれぞれ取得する最適フィードバックゲイン取得部と、最適フィードバックゲイン取得部により取得された複数の最適フィードバックゲインのうち最小のフィードバックゲインを制御系のフィードバックゲインとして設定するフィードバックゲイン設定部とを備える。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】アベイラビリティ演算部5にて、アプリ情報に含まれるアプリケーションの要求に応じたアベイラビリティ変更や車両情報に応じたアベイラビリティ変更が行われるようにする。これにより、アプリケーションの要求や車両情報を反映して各制御対象のアベイラビリティを変更することが可能となり、より適切な制御対象を選択してアプリケーションの要求や車両情報に忠実な車両横方向運動制御を実行することが可能となる。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】F/B演算部7での制御対象の選択について、各制御対象のアベイラビリティである最大制御量から各制御対象のF/F要求値を引いた差から各制御対象の余裕度を演算し、この余裕度に基づいて行うようにする。これにより、余裕度がF/B要求値よりも大きな制御対象を選択して車両横方向運動制御を実行することが可能となる。したがって、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
車両運動制御システム
【課題】菱形車輪配置車両の実用性を向上させる車両運動制御システムを提供する。
【解決手段】前輪12Fと後輪12Rとの少なくとも一方を転舵させる転舵装置を制御するための制御装置が有する制御部を、左輪14Lおよび右輪14Rのいずれか一方に目標とされる駆動力と目標とされる制動力との少なくとも一方を付与できない失陥が駆制動装置に生じた場合に、その失陥に起因して生じる車両のヨーイング(ヨーモ−メントMyaw)を抑制すべく、転舵輪12F,12Rとのうちの1以上のものの転舵量を制御するように構成する。それにより、失陥に起因して生じる車両のヨーイングと逆向きのヨーモーメントを発生させ、その失陥に起因するヨーイングを低減させることが可能とされている。つまり、本車両運動制御システムによれば、上記のような駆制動装置の失陥時においても、車両の直進性を確保することが可能である。
(もっと読む)
車両の運動制御装置
【課題】ステア特性制御と安定化制御との間の制御干渉を抑制できる車両の運動制御装置を提供すること。
【解決手段】ステア特性制御としてスタビライザ制御、減衰力制御等が実行されて、車両のステア特性が車両の走行状態に応じて意図的に初期ステア特性から変更される。安定化制御では、オーバステア状態量Jos(アンダステア状態量Jus)がしきい値Tho(Thu)を超えた場合、制動トルクの調整により発生するヨーモーメントを利用してステア特性が初期ステア特性に近づけられる。ステア特性制御によりステア特性がオーバステア側(アンダステア側)に調整されている場合、しきい値Tho(Thu)が大きくされて、安定化制御が開始され難くなる。ステア特性制御によりステア特性が意図的に調整される傾向が安定化制御の介入により抑制される事態(制御干渉)が抑制され得る。
(もっと読む)
車両用転舵制御装置および車両用転舵制御方法
【課題】ブレーキ液圧の変動によらず、転舵対象車輪の車輪転舵角を安定性を良くすることのできる車両用転舵制御装置および車両用転舵制御方法を提供する。
【解決手段】ブレーキ液圧補正演算部61は、ブレーキ液圧が上昇している場合において、ブレーキ液圧が減少したときにブレーキ液圧を増加させて補正したブレーキ液圧補正値を出力する。そして、路面摩擦係数推定部63は、このブレーキ液圧補正値に基づいて路面摩擦係数を推定する。これにより、操舵制御量が安定化しスプリットμ路における運転者による修正操舵を容易にする。
(もっと読む)
電動パワーステアリング装置
【課題】リヤトーコントロール装置が故障した場合に、操舵反力を付与し得る電動パワーステアリング装置の制御を適正にしてヨーモーメントの打ち消し易くする。
【解決手段】ステップ1で故障信号Sfの入力によってリヤトーコントロール装置11の故障が判定され(Yes)、ステップ6で左右の後輪5l,5rのトー角δrl,δrrが非対称と判定された場合(No)、故障時用のヨーレイト反力成分マップを参照してヨーレイト反力成分Tbγを正常時よりも大きく設定し(ステップ7)、故障時用の操舵角反力成分マップを参照して操舵角反力成分Tbθを正常時よりも小さく設定する(ステップ8)。
(もっと読む)
車両制御装置及び車両制御方法
【課題】運転者に違和感を与えることなく車両の安定性を確保することができる車両制御装置及び車両制御方法を提供する。
【解決手段】目標ヨーレートφ´tと目標横速度Vytとに基づいて算出される目標前輪舵角θt及び目標後輪舵角δtに基づいて、前輪操舵アクチュエータ7及び後輪操舵アクチュエータ8を駆動制御して前輪操舵機構12及び後輪操舵機構15を駆動する。また、運転者による緊急操舵を検出したとき、その緊急度(緊急度判定値Kd)が高いほど各輪に付与する制動力を大きく設定する。これにより、緊急操舵時の車両の応答性を確保しつつ安定性を向上することができる。
(もっと読む)
車両制御装置及び車両制御方法
【課題】車両の安定性を確保することができる車両制御装置及び車両制御方法を提供する。
【解決手段】目標ヨーレートφ´tと目標横速度Vytとに基づいて算出される目標前輪舵角θt及び目標後輪舵角δtに基づいて、前輪操舵アクチュエータ7及び後輪操舵アクチュエータ8を駆動制御して前輪操舵機構12及び後輪操舵機構15を駆動する。また、目標後輪舵角δtが最大転舵角より小さい転舵角閾値δS以上であるとき、目標後輪舵角δtを減少補正し、補正前の目標後輪舵角δtと補正後の目標後輪舵角δ´tとの差分に基づいて、各輪に付与する制動力を制御する。これにより、後輪転舵角が最大転舵角に達する前にブレーキ制御を作動する。
(もっと読む)
加減速制御装置
【課題】運転者の加減速意図に沿う制御量で車両を加減速させる加減速制御装置を提供する。
【解決手段】加減速制御装置6は、自車両1の前後加減速度を制御する前後加減速制御部400と、前後加減速制御部400に制御介入して前後加減速度を補正する補正制御部500と、補正制御部500による制御介入を許可または禁止する制御介入許可判断部300を有する。そして、自車両1の横加々速度に基づき自車両1の前後加減速度を補正し、自車両1の前後加減速度の補正を所定条件に基づき許可または禁止する処理を行う。これにより、自車両1の動作を、より運転者の加減速意図に沿ったものとし、前後加減速度の補正制御に起因した運転者の違和感を低減する。
(もっと読む)
車両挙動制御装置
【課題】スプリットμ路における制動において低μ側の車輪の制動力を最大限に活用しつつ車両の制動距離を低減する車両挙動制御装置を提供する。
【解決手段】左右後輪2L,2Rのトー角を各々独立して制御する後輪トー角制御装置を備えた車両挙動制御装置であって、後輪トー角制御装置は、車両の制動時において後輪軸上の左右後輪2L,2Rの路面との摩擦係数の差を検出したとき、高い摩擦係数側の後輪のみトーアウト側に向きを変えるように制御することを特徴とする。
(もっと読む)
衝突回避支援装置
【課題】障害物を検知したときに、車両を効果的に減速するとともに、障害物に回避スペースがあるときは、車両を回避スペースの方向に旋回して障害物との接触を回避させる、衝突回避支援装置を提供することを目的とする。
【解決手段】左右の後輪2L、2Rのトー角を独立して制御可能なトー角変更装置120を有する車両システム100を備える車両Vにおいて、レーダ装置160が進行方向に障害物を検知したとき、障害物の左右方向に回避スペースがあるときには、操舵制御ECU130は、ブレーキ装置140を作動させるとともに、後輪2のトー角を制御して、車両Vを回避スペースの方向に旋回させる。一方、障害物の左右方向に回避スペースが無いときには、操舵制御ECU130は、ブレーキ装置140を作動させるとともに、後輪2をトーインさせて、車両Vを効果的に停止・減速させることを特徴とする。
(もっと読む)
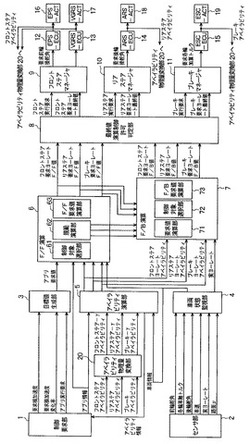
車輪の個々のブレーキング制御装置の支援による、4輪操舵装置を有する自動車の制御方法
本発明は、4輪操舵装置を有する自動車の制御方法に関する。本発明の自動車の制御方法においては、自動車の軌跡が所定の閾値を越えて逸脱したことが検出されたときには、前輪に対する第1のブレーキングトルク(Cmodel)の発生が指令され、自動車の軌跡が所定の閾値を越えて逸脱したことと、後輪の操向装置が故障していることとが検出されたときには、前輪に対する、第1のブレーキングトルク(Cmodel)とは異なる、第2のブレーキングトルク(Cesp)の発生が指令される。 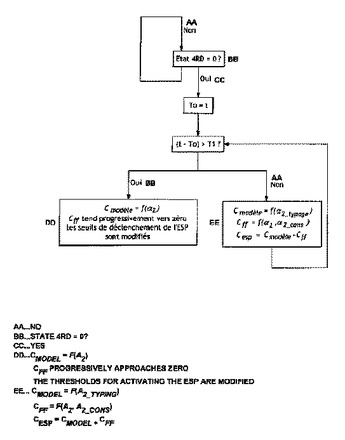 (もっと読む)
(もっと読む)
1 - 17 / 17
[ Back to top ]