
Fターム[3D246HA28]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 推進用モータ状態 (72)
Fターム[3D246HA28]に分類される特許
1 - 20 / 72
車体挙動安定化装置
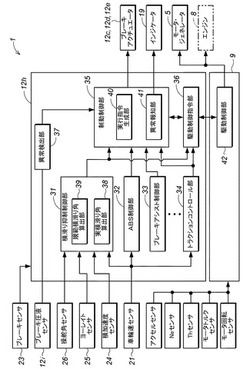
【課題】制動制御装置および駆動制御装置を用いた車体挙動安定化装置において、車体挙動安定化制御用のアクチュエータが異常となったときに車体挙動を安定化させる。
【解決手段】モータ・ジェネレータ5および/またはエンジン8の駆動力を制御することで第1の車体挙動安定化制御を実行する駆動制御指令部36と、ブレーキアクチュエータ12c〜12fを駆動制御して前後左右の車輪2・3の制動力を独立制御することで第2の車体挙動安定化制御を実行する制動制御部35と、ブレーキアクチュエータの異常を検出する異常検出部37とを備えた車体挙動安定化装置1において、異常検出部37がブレーキアクチュエータの異常を検出した場合、制動制御部35が2の車体挙動安定化制御を停止するとともに、駆動制御指令部36に対して車体挙動安定化制御の実行指令を出力し、駆動制御指令部36が単独で第1の車体挙動安定化制御を実行するようにする。
(もっと読む)
ハイブリッド車両の駆動装置

【課題】クラッチ係合状態からのダウン変速時における変速ショックの抑制と燃費の向上とを両立させるハイブリッド車両の駆動装置を提供する。
【解決手段】クラッチK0が係合された状態からの自動変速機16のダウン変速に先立って、そのクラッチK0のトルク容量を低減させると共に、電気式制動装置74及び前記電動機MGの少なくとも一方による制動力を変化させるものであることから、電気式制動装置74乃至電動機MGにより変速ショックを低減するための補償制御を実行するのに必要なトルクを、クラッチK0のトルク容量低下分だけ確保することができるため、電動機MGによる回生量の減少を抑制しつつ変速ショックの発生を好適に抑制することができる。
(もっと読む)
ハイブリッド車両の坂道でのバック防止制御方法
【課題】ハイブリッド車両に既存のEHSシステムを適用し、そのEHSシステムの動作状態を判断することで、車両のアイドルストップまたはEVモードの走行条件でも坂道発進の出発遅延及びバックする現象を防止するハイブリッド車両の坂道でのバック防止制御方法を提供する。
【解決手段】坂道発進補助装置(EHS)を備えたハイブリッド車両の坂道でのバック防止制御方法において、坂道での登坂走行の際、一旦停車してから再出発する場合、ハイブリッド制御器でEHSの作動状態を判断し、EHSが作動しているとき、そのEHSの作動を解除させる制御を行ない、EHSの作動状態判断の際、EHSの動作条件を確認して動作条件であるかを判断する動作条件判断段階、及びEHSの動作条件を満たす場合、EHSが作動して制動力が設定されているかを確認する制動力確認段階を行う。
(もっと読む)
車両の回生ブレーキ制御装置
【課題】比較的高速から低速まで一定の踏み込み量のブレーキペダル操作で減速をしても違和感の無い減速を可能とし、ABS作動時の減速感の途切れを抑えて運転者の不安感を解消することができる車両の回生ブレーキ制御装置を提供すること。
【解決手段】ABS装置と液圧ブレーキ及び回生ブレーキを備えた車両の液圧ブレーキによって発生する液圧制動力と回生ブレーキによって発生する回生制動力をABSの動作と車速に応じて制御して運転者が要求する制動力を得るとともに、回生ブレーキは、アクセルペダルの開放状態が検知されると「アクセルOFF回生制動力」を発生させ、ブレーキペダルの踏み込み操作が検知されると「ブレーキON回生制動力」を発生させ、ABS作動時に前記回生制動力をABS非作動時のそれよりも下げるよう制御する車両の回生ブレーキ制御装置において、回生制動力の低車速域の値が高車速域の値よりも大きくなるよう制御する。
(もっと読む)
車両制御装置
【課題】大型化を回避しつつ音振性能を確保し、安価でありながら適切な回生協調制御を達成可能な車両制御装置を提供すること。
【解決手段】モータを駆動源とする車両において、制動時にモータによる回生制動力と油圧による摩擦制動力とを協調させる回生協調制動力の制御において、回生協調制御により回生制動力から摩擦制動力にすり替えるときは、設定したすり替え速度範囲において、ギヤポンプの能力や音振性能への影響を及ぼさない範囲で、各制動力の変化勾配を最大変化勾配より小さな所定勾配以下に制限することで所望の制動力を得るととした。
(もっと読む)
電動乗物用のAC駆動システム
【課題】実用的な乗物用の駆動システムを提供する。
【解決手段】この駆動システムは、駆動トルクを提供するための交流(AC)モータを含んでいる。ACモータコントローラは、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、前進/ニュートラル/後退(FNR)信号、および、実用的な乗物が駆動するように設定されているか、牽引されるように設定されているかを示す走行/牽引信号を受信する。ACモータコントローラは、ACモータのためのAC駆動信号を生成し、AC駆動信号は、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、FNR信号、および走行/牽引信号に基づいている。
(もっと読む)
ブレーキ制御装置
【課題】異常が発生した場合において制動力を充分に確保することを可能とするブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、液圧制動力と回生制動力とを併用して制動力を発生させる。このブレーキ制御装置は、異常時において補助的に発生させる回生制動力の要求値を演算する制御部と、運転者のブレーキ操作に連動して変動する検出値を制御部に各々が出力する複数のセンサと、を備える。制御部は、複数のセンサのいずれかを選択し、選択されたセンサの検出値を要求値の算出の基礎として用いる。
(もっと読む)
電気自動車
【課題】 左右の車輪を個別に駆動する複数のモータを備えた電気自動車において、1輪分のモータ異常が発生した場合に、停止させることなく、車両姿勢の安定化を図って走行を可能とする。
【解決手段】 各モータ6の異常を検出するモータ異常検出手段37と、片側異常時対応制御手段38とを設ける。片側異常時対応制御手段38は、モータ異常検出手段37により、車両の同じ前後方向位置にある左右のいずれか一方の車輪2,3のモータ6にモータ停止以外の異常が検出された場合に、同じ前後方向位置にある他方の車輪2,3のモータ6を、異常の検出されたモータ6の動作状態と同じ動作状態に近づくように制御する。この制御は、他方のモータ6のトルクを強制的に減じる制御、回生ブレーキとして作用させる制御、他方の車輪2,3のブレーキ作動の制御等とする。
(もっと読む)
車両保持制御装置及び車両保持制御方法
【課題】モータの電力消費量を最小限に抑えることができる車両保持制御装置及び車両保持制御方法の提供。
【解決手段】車両の登坂状態が検出され、かつブレーキペダル17のオフ状態を検出した際に、ブレーキ油圧を保持した後に、徐々に解放する油圧ヒルホールド手段と、走行駆動力を供給可能なフロントモータ4、リヤモータ6と、各モータの駆動力を制御するモータECU11,12とを備えた車両保持制御装置であって、登坂状態の車両1のずり下がりを防止するのに必要な必要車両保持力を路面勾配と車両重量に基づいて導出するエンジンECU13を備え、モータECU11,12は、油圧ヒルホールド手段により徐々に油圧が解放されて減少する車両保持力が、エンジンECU13により導出された必要車両保持力以下になるときに、不足した車両保持力をフロントモータ4やリヤモータ6のトルクで補う。
(もっと読む)
自動車
【課題】坂道の発進の際に車両のずり下がりを抑制しつつ、シフトポジションがニュートラルポジションとされたときに運転者が予期するよう車両を動作させて運転者に違和感を与えないようにする。
【解決手段】停車したときや停車中にシフトレバーが操作された際、シフトポジションSPが前進用ポジション(D,B)のときには、前方に上り勾配のときにだけ制動力保持制御を許可し、それ以外のときには制動力保持制御を禁止し、シフトポジションSPが後進用ポジション(R)のときには、前方に下り勾配のときにだけ制動力保持制御を許可し、それ以外のときには制動力保持制御を禁止し、シフトポジションSPがニュートラルポジション(N)のときには、勾配に拘わらずに制動力保持制御の実行を禁止する。
(もっと読む)
車両の状態量計測用制御システム
【課題】駆動輪のみを回転させる台上試験において、従動輪を備える車両の状態量を治具を用いずに簡易に計測することが可能な車両の状態量計測用制御システムを提供する。
【解決手段】備えた車両の状態量計測用制御システム30は、駆動輪である左右前輪の車輪速度を検出する左右前輪速度センサ31a,31b及び従動輪である左右後輪の車輪速度を検出する左右後輪速度センサ31c,31dによって検出された左右前輪の車輪速度及び左右後輪の車輪速度に基づいて、車両を制御するENG−ECU33a,VSA−ECU33b,AHB−ECU33cを備え、ENG−ECU33a,VSA−ECU33b,AHB−ECU33cは、外部端末装置40から台上試験中である旨の信号が入力された場合には、左右後輪の擬似車輪速度を生成し、検出された左右後輪の車輪速度に代えて、生成された左右後輪の擬似車輪速度を左右後輪の車輪速度とする。
(もっと読む)
トルク異常検知装置および輸送機器
【課題】動力源に掛かる負荷トルクの異常を検知可能なトルク異常検知装置および輸送機器を提供することである。
【解決手段】トルク異常検知装置10は、動力源に掛かる負荷トルクを推定する負荷トルク推定手段12と、動力伝達手段30,30a,50,55によってシステム外部60との動力の伝達を切断する状態で、負荷トルク推定手段12によって推定される負荷トルクに基づいて動力源に掛かる負荷トルクの異常を検知する負荷トルク異常検知手段13とを有する。システム外部60との間で動力の伝達が切断されるので、システム外部60の変動や変化等による影響を受けない。よって、負荷トルクを精度良く推定でき、負荷トルク異常検知手段13は何らかの故障等が起きたことを的確に検知できる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】回生協調ブレーキ制御時のショックを抑制することを目的とする。
【解決手段】動力源としてエンジン及びモータジェネレータを備えるハイブリッド車両の制御装置であって、所定の低車速域で、車速に応じた大きさのクリープトルクを駆動トルクとして発生させるクリープトルク発生手段(S10)と、回生協調ブレーキ制御時に前記回生制動トルクが0になるまでは、車速にかかわらずクリープトルクの大きさをハイブリッド車両の駆動系のバックラッシュを抑制可能な0に近い所定のガタ詰めトルクに制限するクリープトルク制限手段(S8)と、回生制動力が0になった後は、クリープトルクをガタ詰めトルクから車速に応じた大きさのクリープトルクへと変化させるときの変化率を制限するクリープトルク変化率制限手段(S9)と、を備える。
(もっと読む)
電気自動車の制動制御方法
【課題】モータによる回生制動が不可なモータまたはバッテリーの過温時や変速段がN段に操作される場合で回生制動量の急激な減少及び油圧制動装置の油圧応答遅延にて発生する制動力減少を効果的に解消できる電気自動車の制動制御方法を提供する。
【解決手段】本発明の電気自動車の制動制御方法は、回生制動が行われる状態で変速レバーのN段操作を検出する段階と、変速レバーのN段操作を検出した時点からモータの回生制動量を線形的に減少させると同時に、制動量の補償のために油圧制動装置の油圧制動量を増加させる段階と、N段操作の検出時から設定時間が経過すると、変速機のN段変速が行われるようにする段階と、を含む。
(もっと読む)
ハイブリッド車
【課題】内燃機関を始動する際に運転者に違和感を与えるのを抑制する。
【解決手段】停車中にエンジンを始動する停車始動時において、バッテリの出力制限Woutが閾値Wref未満のときには(S120)、停車始動時の車輪(駆動輪39a,39bや従動輪)の固定に要する最低限の制動力である固定用最低限制動力Flomin以上の制動力の油圧ブレーキによる車輪への付与を伴ってエンジンをモータリングして始動する(S110,S160〜S200)。これにより、バッテリの出力制限Woutが大きく制限されている状態での停車始動時において、運転者に違和感を与えるのを車輪のより確実な固定によって抑制することができると共に、モータMG2の電力消費の抑制によってバッテリからの放電電力を低減することができる。
(もっと読む)
車両の制御装置
【課題】坂路で車両を停止させる際、制動装置を制御するソレノイドバルブの作動回数を抑制すると共に、車両の移動を抑制することができる車両の制御装置を提供する。
【解決手段】坂路においてブレーキペダル36の踏み込みが解除されても、制動手段100によって車速Vの上昇が制限されるため、規定時間Ta内ではパーキングロック可能な車速Vに制限される。したがって、パーキングレンジが選択された際に、ブレーキ油圧Pbkを制御するソレノイドバルブ50を再度作動させることが防止され、ソレノイドバルブ50の作動回数増加による耐久性低下が抑制される。また、ブレーキペダル36の踏み込みが解除されると、ホイールブレーキ46のブレーキ油圧Pbkが急激に低下せず、所定の勾配ΔPで低下するに従い制動力が発生するため、その車両の移動が抑制される。
(もっと読む)
車両の制御装置
【課題】走行抵抗が急低下したとき、加速度の急変を抑えつつ、ドライバの意図に合致した駆動力制御を行うことができる車両の制御装置を提供すること。
【解決手段】電気自動車1は、アクセル開度センサ7と、走行抵抗演算部12と、走行抵抗急低下判断部14aと、単調増加変数演算部13cと、電子コントロールユニット5と、を備えた。走行抵抗演算部12は、車両走行中、外乱による走行抵抗推定値FDを検出する。走行抵抗急低下判断部14aは、車両走行中、走行抵抗の急低下を検出する。単調増加変数演算部13cは、走行抵抗の急低下を検出したとき、アクセル開度に基づいて車両駆動力の単調増加変数を設定する。電子コントロールユニット5は、単調増加変数と走行抵抗推定値FDに基づいて目標車両駆動力を設定し、タイヤへ加える駆動力抑制により、実車両駆動力を前記目標車両駆動力に収束させる制御を行う。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
複合ブレーキの協調制御装置
【課題】制動初期における摩擦制動の応答遅れを補う回生制動が中止された場合でも、違和感を伴う減速度の急変を生じないようにする。
【解決手段】マスターシリンダ圧が発生させ始める瞬時t1より、目標制動トルクtTtotalはブレーキペダルの踏み込み応じて図示のごとくに立ち上がる。瞬時t1より、マスターシリンダ圧が設定値以上になる瞬時t2までの間、目標制動トルクtTtotalを発生可能最大回生制動トルクで賄い得てtTm=tTtotalにすべきところながら、目標回生制動トルクtTmに対し、制限された早期回生制動トルクを設定すると共に、不足分を補う目標摩擦制動トルクtTbとにより目標制動トルクtTtotalを実現する。この制限された早期回生制動トルクは、回生制動を中止せざるを得なくなって回生制動トルクが早期回生制動トルクから一気に0になった場合でも、車両の減速度が運転者に違和感を与えることのない値とする。
(もっと読む)
車両のブレーキシステム
【課題】極力少ない電磁弁の作動によって回生協調ブレーキ制御を行うことでき、かつ、失陥時に制動力を確保可能な車両のブレーキシステムを提供すること。
【解決手段】ブレーキペダル操作によってマスタシリンダ圧を発生するタンデム型マスタシリンダと、前輪系統配管と後輪系統配管とを連通すると共に、第2マスタシリンダ室と前記後輪系統配管とを遮断する第1ポジションと、前記前輪系統配管と前記後輪系統配管とを遮断すると共に前記第2マスタシリンダ室と前記後輪系統配管とを連通する第2ポジションとを有するカットバルブと、後輪に接続され、回生力を発生可能なモータジェネレータと、液漏れ検出手段により液漏れが検出されていないときは前記カットバルブを前記第1ポジションとし、液漏れが検出されたときは前記カットバルブを前記第2ポジションに切り換えるコントローラを備えた。
(もっと読む)
1 - 20 / 72
[ Back to top ]