
Fターム[3D246HA29]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | デフ(LSD)、トランスファの状態 (8)
Fターム[3D246HA29]に分類される特許
1 - 8 / 8
駆動力分配装置
【課題】 電動モータにより歯車手段の回転を制御して駆動力を分配する際に、2つの出力軸に大きな回転差が発生しても歯車手段の歯車や各回転要素の回転速度が許容回転速度を超えることがない駆動力分配装置を提供する。
【解決手段】 遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第1の許容回転速度を超えた場合、ブレーキ指示をONにして左右の後輪6に制動力を働かせ、遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第2の許容回転速度を超えた場合、エンジン2の出力が低減され、左右駆動力分配装置11の歯車等の部品(軸受け)の回転速度の上昇を抑制し、左右の後輪6に大きな回転差が発生しても歯車や各回転要素の回転速度が許容回転速度を超えないようにする。
(もっと読む)
リターダの制御装置、車両およびリターダ制御方法、並びにプログラム

【課題】走行条件に係らず補助ブレーキとしての機能を充分に発揮させ、ECUの共通化を図ること。
【解決手段】リターダの動作中に生じる自車両の減速度を計算する補助ブレーキ力計算部71および減速度計算部72を有し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも小さいときには、所定の閾値を、放熱手段(ドラム)の回転速度の変化に対応させて可変的に設定し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも大きいときには、所定の閾値を、一定値に設定し、温度検出手段によって検出された放熱手段(ドラム)の温度が、回転速度検出手段によって検出された放熱手段(ドラム)の回転速度に対応する所定の閾値を超える温度であるときに、電気エネルギの発生を低減させる制御を行うリターダの制御装置を構成する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及びトラクション制御が同時に実行される場合に、車輪速度を検出する装置の異常に起因して基準車輪速度が不適切な値になりトラクション制御が不適切に実行されることを防止する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されているときには、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに基づいて車輪の駆動スリップを判定するための基準車輪速度Vwbを設定する。
(もっと読む)
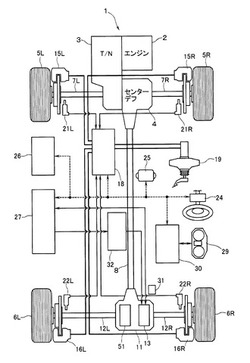
四輪駆動車の制御装置
【課題】駆動系に付加される捩れトルクを低減して、駆動系部品の耐久性を向上する。
【解決手段】センターデフロック状態での旋回走行中に、駆動系に蓄積された捩れに伴う発生捩れトルクTh(DS捩れトルクThDS)が所定トルク(DS許容トルクTy)以上となる駆動系の捩れ状態となった場合は、前輪14にホイールブレーキ装置96によるブレーキトルクTBが加えられるので、例えば前輪14にかかるDS捩れトルクThDSの一部をホイールブレーキ装置96によるブレーキトルクTBで分担することができる為、駆動系(フロントDS34)に実質的に付加されるDS捩れトルクThDSが低減される。よって、駆動系部品の耐久性が向上される。その為、例えば駆動系部品の耐久性を確保する為に駆動系部品を大型化したりする必要が無く、駆動系部品の小型化や軽量化を図ることができる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右の駆動輪に駆動力を配分制御してヨー運動を制御する際に、ヨー運動の制御初期の応答性を確保しながら、過制御により車両が不安定になるのを防止する。
【解決手段】 駆動源からの駆動力を左右の駆動輪に配分する駆動力配分量を車両の横方向挙動の状態量に基づいて制御する際に、前記駆動力配分量を、操舵角速度算出手段32で算出した操舵角速度θ′と横加速度変化率算出手段31で算出した横加速度変化率YG′とに基づいて補正するので、操舵角θよりも立ち上がりの変化が大きい操舵角速度θ′によりヨー運動の制御初期の応答性を確保しながら、車両の実際のヨー運動の状態を表す状態量である横加速度変化率YG′を用いることで、車両の横方向の運動性能の変化をフィードバックして駆動力配分制御に反映させ、これにより駆動力配分制御が過制御に陥るのを効果的に防止することができる。
(もっと読む)
車両の旋回挙動制御装置
【課題】旋回走行時における制動力制御を正確に行い、走行安定性能を向上させる。
【解決手段】車両の左右駆動輪の制動力を独立して制御可能に構成して、実ヨーレイトと車速及び操舵角から演算した目標ヨーレイトとの差に応じて旋回内輪の制動圧Puまたは旋回外輪の制動圧Poを設定し、車両がアンダーステア状態である場合には、旋回内輪の制動圧Puからデフにおけるフリクションによる拘束トルクTdを減算して旋回内輪の制動圧Pu’を求め(S60)、車両がオーバーステア状態である場合には、旋回外輪の制動圧Poにデフにおける拘束トルクTdを加算して旋回外輪の制動圧Po’を求める(S100)。そして、求めた旋回内輪の制動圧Pu’または旋回外輪の制動圧Po’で左右駆動輪を制動する(S110)。
(もっと読む)
車両の挙動制御装置
【課題】車両の挙動がドリフトアウト(アンダーステア)傾向に移行しつつある状態でも車両挙動を抑制することができ、期待する抑制方向の逆方向にはモーメントが働かないようにして車両挙動制御が阻害されることがない車両の挙動制御装置を提供する。
【解決手段】駆動可能な左右後輪23の差動を制限するディファレンシャルロックと、差動制限しているか否かを検出する4輪駆動制御部13と、アンダーステア状態か否か判断する走行状態判断部15とを備え、アンダーステア状態のときに、後輪23の旋回内輪側へ制動力を付与して車両の挙動を制御するVDC装置16を有し、車両走行時、左右後輪23への差動制限を行っていることを検知し、且つ、アンダーステア状態にあってVDC装置16による旋回内輪への制動力付与時には、後輪23の旋回外輪側へ、路面と当該輪とのグリップ力が低下するように制動力を付与する制動力付与部12を有する。
(もっと読む)
車両の挙動制御装置
【課題】制御量に対する制御指標の不感帯を適正なものとし、車両の挙動制御の向上を図った車両の挙動制御装置を提供する。
【解決手段】目標挙動設定手段により設定された目標挙動γtと挙動検出手段により検出された実挙動γrとの偏差の相関値Δγが制御指標とされ、挙動制御手段により挙動調整機構は該制御指標に応じて求めた制御量TR/Dに基づき制御されるが、該挙動制御手段は、制御指標の0値近傍に不感帯を有しており、該不感帯の所定幅|γDZ|を、車速VBが第1所定値V1未満の低車速域では該第1所定値V1以上第2所定値V2未満の中車速域よりも広く設定するとともに、車速VBが第2所定値V2以上の高車速域でも上記中車速域よりも広く設定する。
(もっと読む)
1 - 8 / 8
[ Back to top ]