
Fターム[3D246HA51]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 切換スイッチ、選択スイッチ (189)
Fターム[3D246HA51]に分類される特許
1 - 20 / 189
車両の制駆動力制御装置及び制駆動力制御方法
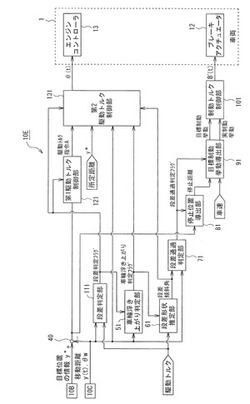
【課題】段差を通過して間もない位置に車両を停止する必要があっても、急な速度変化が発生することを抑制可能とすることを目的とする。
【解決手段】車両の制動力及び駆動力を制御して、取得した目標位置に車両を誘導または駐車する車両の制駆動力制御する際に、段差を通過する際に生じる目標位置に対する車両の相対速度の変動に応じて駆動力指令値を増大する。但し、上記段差を乗り越えるために、当該段差に接触した車輪の上方への変位である車輪の浮き上がりと判定すると、上記付加駆動力分の指令値が小さくなるように、上記駆動力指令値の上昇を抑制する。そして、駆動力指令値の抑制中に制動指令を制動装置に出力する。
(もっと読む)
車体速度制御装置

【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
車両の制動制御装置
【課題】旋回方向内側の車輪に制動力を付与させる旋回時制動制御の終了条件の成立に伴って該制動力を減少させる際に、車両の乗員が感じる旋回方向外側への飛び出し感を小さくすることができる車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、小回り制御の終了条件が成立した場合(ステップS13:YES)に取得されたステアリングの操舵角Aに基づき、旋回方向外側への力が大きいほど、旋回方向内側の車輪に対する制動力の減少速度Vbが低速度となるように減少制御を行う(ステップS21)。
(もっと読む)
車両の制動制御装置
【課題】車両の旋回時に、旋回方向内側の車輪に制動力を付与させる旋回時制動制御が運転手の意図に反して行われることを抑制できる車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、作動ボタンがオン状態である場合(ステップS10:YES)、車両の車体速度VS及びステアリングの操舵角Aを取得する(ステップS11,S12)。そして、ブレーキ用ECUは、取得した車体速度VS及び操舵角Aに基づき、規定時間Tthの間、車両の走行状態が直進状態であることが継続中であるという第1の条件が成立した場合(ステップS19:YES)、作動ボタンをオン状態からオフ状態に自動的に変更させる(ステップS20)、又は作動ボタンの操作状態をオフ状態に変更することを促す。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
パーキングブレーキ装置
【課題】手動操作でパーキングブレーキを作動させた後にパーキングブレーキを解除する際に、操作レバーの解除位置への移動をアシストして、操作者の負担を低減できるパーキングブレーキ装置を提供する。
【解決手段】パーキングブレーキを操作する操作レバーと、操作レバーと遊嵌状態で連結されたレバー連結部を有し、レバー連結部を介して手動操作とは別に操作レバーを移動可能なアクチュエータと、アクチュエータに加わる負荷を検出する負荷検出手段と、アクチュエータを駆動制御する制御部と、制御部へパーキングブレーキの作動または解除の指示を出す操作スイッチとを備え、操作スイッチからパーキングブレーキの解除指示が出されたとき、制御部はアクチュエータをパーキングブレーキの作動方向に駆動させ、負荷検出手段が操作レバーとレバー連結部の係合による負荷を検出した時点で、アクチュエータをパーキングブレーキの解除方向へ駆動する。
(もっと読む)
ハイブリッド車両の坂道でのバック防止制御方法
【課題】ハイブリッド車両に既存のEHSシステムを適用し、そのEHSシステムの動作状態を判断することで、車両のアイドルストップまたはEVモードの走行条件でも坂道発進の出発遅延及びバックする現象を防止するハイブリッド車両の坂道でのバック防止制御方法を提供する。
【解決手段】坂道発進補助装置(EHS)を備えたハイブリッド車両の坂道でのバック防止制御方法において、坂道での登坂走行の際、一旦停車してから再出発する場合、ハイブリッド制御器でEHSの作動状態を判断し、EHSが作動しているとき、そのEHSの作動を解除させる制御を行ない、EHSの作動状態判断の際、EHSの動作条件を確認して動作条件であるかを判断する動作条件判断段階、及びEHSの動作条件を満たす場合、EHSが作動して制動力が設定されているかを確認する制動力確認段階を行う。
(もっと読む)
加減速度制御装置、加減速度制御方法
【課題】アクセル操作子にブレーキ操作子の機能を統合した場合の減速操作性を向上させる。
【解決手段】操作量Saに応じて目標加減速度Gaを設定し、操作量Sbに応じて目標加減速度Gbを設定する。そして、目標加減速度Ga設定手段で設定した目標加減速度Gaと目標加減速度Gb設定手段で設定した目標加減速度Gbとを加算した目標加減速度に応じて、車両の加減速度を制御する(S104、S105)。そして、統合操作制御モードの場合(S101の判定が“No”)、操作量Saが0よりも大きな閾値thであるときには目標加減速度Gaを0とし、操作量Saが閾値thよりも小さいほど目標加減速度Gaの実数を負側に小さくする(S106)。また、操作量Sbが大きいほど目標加減速度Gbの実数を負側に小さくする(S107)。
(もっと読む)
車両制動装置
【課題】より快適なフィーリングを実現し、エネルギー効率の低下と燃費の悪化を招くことを防止することができる車両制動装置を提供すること。
【解決手段】車両制動装置は、選択スイッチにより車両制御手段2cの動作が選択されないで、減速指令がある場合に、減速指令により定まる制動要求減速度が所定減速度以下である場合、ポンプが基礎油圧又は操作油圧を増圧して制御油圧を発生させる増圧制動処理を実行しない制動処理手段5aを備えることを特徴とする。
(もっと読む)
車両運転支援装置
【課題】ドライバーの運転操作の経年的な衰えを検出し、検出した衰えに応じた車両運転の支援を行う。
【解決手段】ドライバーの年齢別およびブレーキ操作開始時の車速別に、車両のブレーキ操作開始から車両停止までの期間における、車両の減速挙動を表す減速挙動データ(制動距離、減速度の標準偏差)を、減速時学習データとして記録し、当該減速時学習データが記録された後、車両のブレーキ操作開始時(ステップ210)に、減速時学習データ中の最新の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、学習データ中の最新よりも過去の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、を比較し(ステップ220)、その比較結果に基づいて、ドライバーの運転能力が所定基準以上に衰えているか否かを判定し(ステップ230、240)、判定結果に応じて制動力を変化させる。
(もっと読む)
異常時対応運転制御の要否判定方法および異常時対応運転制御の要否判定に基づく運転制御装置
【課題】運転者の体調に異常があるときに実行する異常時対応運転制御の要否を的確に判定する方法を提供し、また該判定を異常時対応運転制御の的確な始動+に生かす。。
【解決手段】運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせる。押圧力としては、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された押圧力を使用する。運転者による異常時対応運転制御の始動は、上記の要否判定が要と判定されたとき許可する。
(もっと読む)
電動乗物用のAC駆動システム
【課題】実用的な乗物用の駆動システムを提供する。
【解決手段】この駆動システムは、駆動トルクを提供するための交流(AC)モータを含んでいる。ACモータコントローラは、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、前進/ニュートラル/後退(FNR)信号、および、実用的な乗物が駆動するように設定されているか、牽引されるように設定されているかを示す走行/牽引信号を受信する。ACモータコントローラは、ACモータのためのAC駆動信号を生成し、AC駆動信号は、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、FNR信号、および走行/牽引信号に基づいている。
(もっと読む)
先行車追従走行装置
【課題】燃費の悪化が抑制でき、且つ、先行車に対する追従性も良好な先行車追従走行装置を提供する。
【解決手段】先行車追従制御において、摩擦ブレーキ開始閾値式(L1)、エンジンブレーキ開始閾値式(L2)、加速制御終了閾値式(L3)を用いて、摩擦ブレーキ開始閾値、エンジンブレーキ開始閾値、加速制御終了閾値を逐次算出する。そして、エンジンブレーキ開始閾値と加速制御終了閾値の間を等速領域とし、KdB_cの現在値が等速領域にあれば等速制御を行う。等速制御を行うことができる結果、加減速の頻度が低下するので、燃費の悪化が抑制できる。また、減速の頻度が少なくなることにより、割り込み車が加速した場合や、先行車が減速後、再加速した場合に、先行車に追従するための加速が少なくて済むので、追従性も良好となる。
(もっと読む)
衝突回避装置
【課題】ユーザーが煩わしさを感じることのないPCS制御を行うことのできる衝突回避装置を提供する。
【解決手段】検出手段と、検出された物体を衝突判断対象物とし、当該衝突判断対象物と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断対象物と自車両との衝突を回避するための衝突回避制御を行う制御手段と、衝突回避制御を解除する解除手段と、自車両の位置を示す情報および自車両の車両情報の少なくとも一方の情報を取得する車両情報取得手段と、衝突回避制御の態様を変更する変更手段と、解除手段によって衝突回避制御が解除されたときの自車両の位置を示す情報を解除時位置情報として、解除手段によって衝突回避制御が解除されるときの自車両の車両情報を解除時車両情報として車両情報取得手段から少なくとも一方を取得し記憶する記憶手段とを備える。
(もっと読む)
車両の衝突予防安全装置
【課題】衝突予防機能を害することなく低消費電力に寄与することができる車両の衝突予防安全装置を提供する。
【解決手段】自車前方の先行車を認識すると共に当該先行車との距離を測定する先行環境認識部による認識結果などを用いて車両の衝突予防安全処理を行う衝突予防安全装置において、自車が高速道路の合流地点以外を走行中であり、周囲所定範囲に他車が存在せず、自車の前方に見通し可能な第1距離以上の道路が存在しているという条件を満足するとき、自車の前方の道路の距離に応じて先行環境認識部による先行車の認識及び測距の処理を軽減する制御を行う。
(もっと読む)
制動力制御装置
【課題】緊急停止時に車両の移動を速やかに規制することが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12は、車両10の駐車時に車両10の移動を規制する移動規制手段22、62a〜62dを備える。移動規制手段22、62a〜62dは、緊急ブレーキ制御手段118が作動して車両10が停車したと判定したとき、運転者による駐車操作がなくても、車両10の移動を規制する。
(もっと読む)
車両の運転支援制御装置
【課題】降坂時定速走行制御による定速走行を、たとえエンジンブレーキでは制動力が不足するような領域でも精度良く安定して行うことができ、ドライバに対して的確な路面情報を伝えつつ、変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を実行する際は、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定車速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、制動力が不足すると判定した場合は、Nレンジ位置にさせると共に、車輪の接地荷重配分に応じて不足する制動力を設定する。また、制動力が不足すると判定した場合には、トランスファクラッチトルクTlsdを略0に近い値に設定させ、制動力が十分であると判定した場合には車輪の接地荷重配分に応じて設定させる。
(もっと読む)
車両用運転支援装置
【課題】勾配路での変速機のダウンシフトが行われない場合にも、ブレーキの自動介入時間を増加させることなく良好な車速制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ACCの実行中にブレーキの自動介入制御が設定時間t0以上継続したことを判定したとき、目標加速度aを予め設定された負側の値Bまで変化させ、変化させた目標加速度aを、基本目標加速度a0が正側の設定値a0thを越えるまでの間維持する割込制御を行う。
(もっと読む)
クルーズコントロールシステム
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】道路状況に応じた設定車速を設定する。
【解決手段】自車両の速度が設定車速と一致するように車両を制御する装置において、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更する。ドライバが前記操作手段を操作することによって前記設定車速を変更してから所定時間以内は、前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化した場合でも、前記設定車速を前記第2の制限速度に変更する処理を抑制する。制限速度が前記第1の制限速度から前記第2の制限速度に変化したことをドライバに報知する。
(もっと読む)
1 - 20 / 189
[ Back to top ]