
Fターム[3D246HA63]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車輪状態 (1,921)
Fターム[3D246HA63]の下位に属するFターム
Fターム[3D246HA63]に分類される特許
1 - 11 / 11
車両のブレーキ制御装置
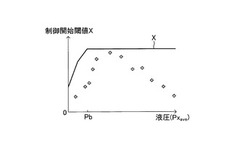
【課題】 作動液の脈動が発生した場合に、ブレーキ操作フィーリングを成立させながらリニア制御弁の過度の作動を抑えて信頼性を確保する。
【解決手段】 作動液の液圧が低い場合には、液圧の脈動振幅が小さくなるという特性がある。また、作動液の液圧が低い場合には、液圧剛性が低くなってブレーキ応答が遅れる。そこで、作動液の脈動が発生した場合には、検出液圧の脈動の中心値を表す液圧Pxaveに基づいて、液圧Pxaveが低い場合には高い場合に比べて小さな制御開始閾値Xを設定する。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法

【課題】走行条件や車両条件に応じてブレーキ力を制御し、滑走の発生頻度を低減させることを可能とするブレーキ制御装置およびブレーキ制御方法を得ること。
【解決手段】複数の車両により構成される列車を制動させるブレーキ力を演算するブレーキ力演算部5と、車両の車輪の滑走を検知した際の車両のブレーキノッチ位置および走行速度を含む走行情報、および滑走情報を記録し、走行情報と滑走情報とに基づいて滑走予測を行い、ブレーキ力に対する車両毎、台車毎、あるいは軸毎の分担ブレーキ力の割合を示すブレーキ分担率を演算する滑走抑制制御部12と、ブレーキ力とブレーキ分担率とに基づいて分担ブレーキ力を設定し、基礎ブレーキ装置にブレーキ制御信号を出力するブレーキ力設定部6と、を備える。
(もっと読む)
車両の制振制御装置
【課題】 通常の制振制御に復帰したときのハンチングの発生を抑制することで制振制御の実行頻度の向上を図ることが可能な車両の制振制御装置を提供すること。
【解決手段】 車体バネ上振動を抑制するような補正トルクに基づいて制駆動トルク発生手段に対し補正トルク指令値を出力するにあたり、補正トルクの振幅が所定振幅以上の状態が所定時間継続しているときは、通常時補正トルク指令値よりも小さな値のハンチング時補正トルク指令値を出力し、その後、補正トルクの振幅が所定振幅以下となる状態が第1の所定時間継続したときは、補正トルク指令値の出力をハンチング時補正トルク指令値から通常時補正トルク指令値に復帰させ、第1の所定時間が経過する前に補正トルクの振幅が所定振幅を超える状態が所定時間継続したときは、ハンチング時補正トルク指令値の出力を継続する。
(もっと読む)
車両横滑り運動状態量推定装置
【課題】摩擦係数や車両の運動状態、あるいは路面のバンク角が変化する過渡期を含めて車両の横滑り運動の状態量の推定精度を高めることができる車両横滑り運動状態量推定装置を提供する。
【解決手段】車輪2−iと路面との間の摩擦特性モデルを含む車両モデルを用い、各車輪2−iの路面反力モデル値を求めると共に横滑り運動状態量モデル値を求める手段と、路面反力モデル値の合力によって車両に発生する横加速度モデル値と横加速度検出手段15,22fの出力が示す横加速度検出値との偏差Accy_errを求める手段と、上記合力によって車両に発生するヨー軸周りの角加速度モデル値と角加速度検出手段13,22cの出力が示す角加速度検出値との偏差γdot_errを求める手段と、偏差Accy_err及びγdot_errに応じて横滑り運動状態量モデル値を補正してなる値を横滑り運動状態量の推定値Vgy_estmとして決定する手段とを備える。
(もっと読む)
車両の車体速度演算装置、及び車両の車体速度演算方法
【課題】車両の進行方向前側に配置された前輪に対して制動力が付与される場合に演算される車両の推定車体速度の正確性の向上に貢献できる車両の車体速度演算装置、及び車両の車体速度演算方法を提供する。
【解決手段】ECUは、前輪にのみ制動力が付与される状態で、リアリフト状態であると判定された場合には、リアリフト状態であると判定される直前の車体減速度よりも大きな値の演算用減速度DVSEを読み出す(ステップS81)。そして、ECUは、前回に演算した推定車体速度VSから演算用減速度DVSEを演算し、該演算結果を今回の推定車体速度VSに設定する(ステップS82)。一方、リアリフト状態であると判定されていない場合、ECUは、各車輪のうち少なくとも一方の車輪の車輪速度に基づき推定車体速度VSを演算する。
(もっと読む)
車両の振動抑制装置
【課題】車体の上下方向の振動を抑制する場合に、エネルギの効率が低下することを抑制することのできる車両の制御装置を提供する。
【解決手段】車体に懸架装置を介して取り付けた前輪および後輪と、前輪の駆動力および制動力、かつ、後輪の制動力および駆動力をそれぞれ独立して制御する制御装置とを有し、前輪に駆動力または制動力を与え、かつ、後輪に駆動力または制動力を与えることにより、車体のピッチングを抑制するピッチング抑制制御、またはバウンシングを抑制するバウンシング抑制制御のいずれか一方をおこなう、車両の振動抑制装置において、バウンシング抑制制御またはピッチング抑制制御の少なくとも一方で、前輪または後輪に制動力を与えるか否かを判断する判断手段(ステップS2)と、前輪または後輪に制動力を与えると判断された抑制制御をおこなうことを禁止する禁止手段(ステップS3)とを備えている。
(もっと読む)
車両の制動制御方法とその装置及び制動状態の判定方法
【課題】制動時の状態が安定状態か否かを確実に判定するとともに、不安定状態にある場合には、スリップ率を小さくして、低摩擦路面での制動距離を短縮する。
【解決手段】車輪に加わる制動力を制御する制動力制御手段18において、上記制動力を周期Δtでステップ状に増加させるとともに、上記周期Δtで、車輪速センサ11で検出した車輪速Vwの2階微分(d2Vw/dt2)の符号の正負から制動状態が安定状態にあるかどうかを判定する判定手段15を設け、制動状態が不安定であると判定された場合には、車輪に加える制動力を減少させるようにした。
(もっと読む)
車両制御装置
【課題】車体モデルと、シャーシモデルと、タイヤモデルとに分離・階層化された車両モデルを用いながら、タイヤの振動状態を精度良く推測する。
【解決手段】
車両モデルにおけるタイヤモデル20は、後輪タイヤモデル21と、前輪タイヤモデル22と、これらの後輪タイヤモデル21と前輪タイヤモデル22とを仮想的に連結する仮想連結要素モデル23とからなる。これにより、タイヤモデル20とシャーシモデル24とを分離しながら、前輪タイヤと後輪タイヤとの間で作用する振動状態の影響を考慮することができるようになり、前輪タイヤ及び後輪タイヤに生じる振動を精度良く推測することが可能になる。
(もっと読む)
自動車や他の車両の走行運転の制御方法
本発明は、個々の車輪および/又は動力伝達系の構成要素に付設された回転センサを介して、所定の走行状態が検出され、制御装置で評価され、車両の所定の機能に対する制御指令や警報信号に転換される、自動車などの走行運転の制御方法に関する。このようにして、例えばABS装置(アンチロックブレーキシステム)、ASR装置(アンチスリップレギュレーションシステム)あるいはEBS装置(電子制御ブレーキシステム)が制御される。
本発明は、従来公知の回転数センサに代えて、回転方向センサを利用することを提案する。回転方向センサは、実際回転方向の検出のほかに、そもそも回転運動が存在するか否かも検出できる。回転方向センサにより、車両の多くの機能を簡単に制御できる。また、回転方向を求めるために従来利用されていた種々のパラメータによる確定計算法を省くことができる。
(もっと読む)
レール車両の制御装置
本発明は、レール車両(2)の制御装置であって、ブレーキ制御装置が設けられており、該ブレーキ制御装置が、ブレーキアクチュエータに制御命令を送るための電子的なブレーキ制御機器を有しており、且つ/又は滑り防止センサ(10)から電子的な滑り防止用制御機器(8)に送られる少なくとも1つの回転速度信号に関連して、少なくとも1本の軸(14)の車輪(12)の車輪スリップを制御する滑り防止装置(1)が設けられており、且つ/又はローリング監視装置が設けられており、該ローリング監視装置が、電子的なローリング監視用制御機器と、少なくとも若干の車輪の回転速度を回転速度信号の形で検出するための少なくとも1つのローリング監視センサとを有しており、更に、例えば脱線、過熱回転された軸受け、不安定な走行等の危機的な状況及び損傷に関して走行装置を監視し且つ/又は診断するための走行装置監視装置(36)が設けられており、該走行装置監視装置が電子的な走行装置監視用制御機器(34)を有している形式のものに関する。
本発明では、電子的な走行装置監視用制御機器(34)が、電子的な滑り防止用制御機器(8)及び/又は電子的なブレーキ制御機器及び/又は電子的なローリング監視用制御機器と一緒に、1つの構成ユニット(38)にまとめられている。  (もっと読む)
(もっと読む)
静的タイヤ・データを利用した車両安定性制御
車両の安定性を制御するシステムおよび方法は、電子制御ユニット(14)によって受信される静的タイヤ・データに少なくとも部分的に基づいて車両安定性制御サブシステム(16、18、20、21)を制御する電子制御システム(12)を含む。  (もっと読む)
(もっと読む)
1 - 11 / 11
[ Back to top ]