
Fターム[3D246HA79]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109)
Fターム[3D246HA79]の下位に属するFターム
ヨー角 (48)
ヨーレート (774)
ヨー角加速度、ヨーモーメント (63)
車体スリップ角 (59)
車体傾斜 (132)
車体速度 (1,392)
車体加減速度 (1,415)
車高、重心高 (28)
重量 (143)
Fターム[3D246HA79]に分類される特許
41 - 55 / 55
自動化された伝動装置および電気的に作動されるパーキングブレーキシステムを備えた車両用の操作装置
本発明は、車両ユーザの操作命令を入力するための少なくとも1つの機械的な操作素子と、操作命令を伝動装置およびパーキングブレーキシステムに対する制御命令に変換するための制御ユニットとからなる、自動化された伝動装置および電気的に作動されるパーキングブレーキシステムを備えた車両用の操作装置に関する。操作素子(1)が連続する少なくとも2つのロックポジション(B,C)とニュートラルポジション(A)とリセットポジション(D)とを有し、第1のロックポジション(B)においてはパーキングブレーキ装置を作動させるためのパーキングブレーキシステム(4)に対する操作命令が形成され、第2のロックポジション(C)においてはパークロック装置を作動させるための伝動装置に対する操作命令が形成される。  (もっと読む)
(もっと読む)
車両の重心位置推定装置及び重心位置/ヨー慣性モーメント推定装置。

【課題】 車両の重心の水平方向位置を車輪の接地荷重値を用いず推定する装置を提供すること。
【解決手段】 本発明の車両に於ける重心の位置を推定する装置は、車両のヨー角加速度の大きさが所定の基準値より小さいとき、車両の車輪と路面との間にて路面から車輪へ水平方向に作用するタイヤ発生力に起因する車両の車体に発生するヨーモーメントの釣り合いに基づいて車両の重心の水平方向位置を推定することを特徴とする。推定された重心位置を用いて、車両のヨー慣性モーメントも推定されてよい。
(もっと読む)
車両の車速制御装置

【課題】所定の設定速度に制御しつつ旋回限界を超えずに安定した旋回を確保可能な車両の車速制御装置を提供する。
【解決手段】先行車との目標車間距離に対応する所定の設定車速に応じた第1の目標車速指令値Vacc を演算し、その第1の目標車速指令値Vacc となるように車両の速度制御を行う先行車追従制御と、車両が安定して走行可能な限界旋回状態に近づいたと判定すると車両の安定した旋回走行を維持するために必要な目標減速度を演算しその目標減速度に応じた制動力を車両に負荷する旋回安定制御を行う。このとき、上記旋回安定制御が演算した目標減速度に応じた第2の目標車速指令値Vcop と、上記先行車追従制御が演算した第1の目標車速制令値とのいずれか小さい値側の目標車速指令値となるように排他的に車両の速度を制御する。
(もっと読む)
車両制御装置
【課題】車体モデルと、シャーシモデルと、タイヤモデルとに分離・階層化された車両モデルを用いながら、タイヤの振動状態を精度良く推測する。
【解決手段】
車両モデルにおけるタイヤモデル20は、後輪タイヤモデル21と、前輪タイヤモデル22と、これらの後輪タイヤモデル21と前輪タイヤモデル22とを仮想的に連結する仮想連結要素モデル23とからなる。これにより、タイヤモデル20とシャーシモデル24とを分離しながら、前輪タイヤと後輪タイヤとの間で作用する振動状態の影響を考慮することができるようになり、前輪タイヤ及び後輪タイヤに生じる振動を精度良く推測することが可能になる。
(もっと読む)
車両
【課題】制動時に車体傾斜を伴い易い車両であっても、姿勢の傾きによって乗員に与える不安を抑制しつつ急制動し得る車両を提供すること。
【解決手段】本発明の車両によれば、車体に設けられている左右一対の車輪は、トウ角調整装置によってそれぞれ独立してトウ角を調整できると共に、車輪位置移動装置によって車体に対する相対的な位置を移動させることができるように構成され、制動手段によるトウ角調整装置及び車輪位置移動装置の作動によって、車輪にトウ角が付与されると共に、車輪の位置を車体に対して相対的に進行方向へ移動される。よって、制動時には、車輪のトウ角と車体に対する相対的位置との両方が調整されるので、制動時に生じる姿勢の傾きによって乗員に与える不安感を抑制することができる。
(もっと読む)
車両用操舵装置
【課題】雪道などの滑り易い路面で車両挙動が不安定となる状態やその予兆を、格別なセンサを追加せずに検出して、車両挙動検出に基づく車両安定化制御を可能にした車両用操舵装置を得る。
【解決手段】実路面反力トルク検出器15と、モータ角速度検出器13と、車速検出器11と、実路面反力トルク、モータ角速度および車速の各検出値から車両挙動の不安定状態を検出する車両挙動推定手段17とを備えている。車両挙動状態の推定結果Stability(s)に基づき、車両挙動を安定化するためのアシストトルクを付与して、車両挙動を安定化する。
(もっと読む)
車輪速度補正装置
【課題】定常円旋回などの定常旋回走行時であっても、異径タイヤ装着等によって生じる左右輪の車輪速度差の誤差を補正可能とする。
【解決手段】左右輪の実速度比に基づいて旋回半径R1を算出し、この旋回半径R1と車速から車体の横加速度を算出する(ST2〜ST4)。次に、実速度比に基づいて算出した算出横加速度が、タイヤグリップ限界等を考慮して設定した上限値(0.5G)を超えているか否かを判定し、算出横加速度が上限値を超えているときには、横加速度が上限値になるように後輪左右の基準速度比を逆算して左右輪の車輪速度の補正係数を算出し、この補正係数を用いて車輪速センサの各出力信号(生データ)を学習補正する(ST5〜ST8)。このように車体の横加速度(旋回半径)に基づいて学習補正を行うことによって、定常旋回走行時に後輪左右の車輪速度の誤差を低減する補正を実施することができる。
(もっと読む)
自動走行車両および追尾システム
【課題】安定した隊列走行を実現すること。
【解決手段】先導車両に追従して自動走行する自動走行車両であって、前方車両との車間距離に応じて走行速度を制御する制御装置を具備する自動走行車両を提供する。
(もっと読む)
車両挙動制御装置
【課題】サスペンション装置に特殊な機構を設けることなく、非制動時の乗り心地を良好に維持しつつ制動時のピッチングを効果的に抑制し得る車両挙動制御装置の提供。
【解決手段】この装置は、アンチダイブジオメトリ及びアンチリフトジオメトリを有する前後輪サスペンションを備えた車両に適用される。アンチリフトジオメトリによるアンチリフト効果の大きさはアンチダイブジオメトリによるアンチダイブ効果の大きさよりも大きい。通常、制動中において前後輪の制動力配分が基本配分に調整される。一方、急激な制動操作が開始された場合、制動開始からの所定の短期間においてのみ、前後輪の制動力配分が基本配分に代えて基本配分よりも後輪の制動力配分が大きい第1配分に調整される。これにより、アンチリフト効果の大きさの増大量がアンチダイブ効果の大きさの減少量よりも大きくなって車両全体としてみればアンチピッチングモーメントが増大する。
(もっと読む)
車両挙動制御装置
【課題】サスペンション装置に特殊な機構を設けることなく、直進時の乗り心地を良好に維持しつつ旋回時の不快なロール挙動を効果的に抑制し得る車両挙動制御装置の提供。
【解決手段】この装置は、アンチダイブジオメトリ及びアンチリフトジオメトリを有する前後輪サスペンションを備えた車両に適用される。制動操作非実行時において直進状態から急激な操舵操作が開始された場合、操舵操作開始からの所定の短期間においてのみ、旋回外側前輪及び旋回内側後輪に制動力が付与される。一方、制動操作実行時では、通常、4輪の制動力が基本制動力に制御されるが、直進状態から急激な操舵操作が開始された場合、操舵操作開始からの所定の短期間においてのみ、前輪側では旋回外側が後輪側では旋回内側の制動力が大きくなるように左右輪の制動力に左右差がそれぞれ設けられる。これらにより、アンチロールモーメントが発生し、ロール角が増大し難くなる。
(もっと読む)
走行制御装置
【課題】複数種類の車両走行制御それぞれに対応した検出結果に基づいて走行制御を行うことができる走行制御装置を提供する。
【解決手段】ナビゲーションシステム12、前方ミリ波レーダ30、近距離ミリ波レーダ32、前方画像センサ40及び後方/側方/周辺画像センサ42の複数のセンサ類を備え、LKA部221、ACC部222、PCS部241の複数の走行制御システムを備えた走行支援システム1において、センサの優先順位は走行制御の全てについて固定されているのではなく、走行制御の種別それぞれに対応して優先順位が設定され、LKA部221等のそれぞれは優先順位に従ってセンサ類それぞれの検出結果を適用して車両を制御するため、複数種類の車両走行制御それぞれに対応した検出結果に基づいて走行制御を行うことができる。
(もっと読む)
トラクタにおけるトレーラ運転の検出方法および制御装置
【課題】トラクタがトレーラ運転内に存在しているかどうかを確実に検出可能な、特に走行動特性制御方法の一部としての、改善されたトラクタにおけるトレーラ運転の検出方法を提供する
【解決手段】 本発明は、特にトラクタおよびトレーラからなる連結車を安定化させるためのトレーラ横揺れ論理を有する走行動特性制御装置の一部としての、トラクタにおけるトレーラ運転の検出方法並びに方法を実行するための制御装置において、トレーラ運転の検出が、走行状態を表わす実際信号と、対応の目標信号との比較により行われるように設計される。
(もっと読む)
選択的アンチロック制動システム
車両の車輪(60)から車両の駆動系を選択的に切断するように構成されているアンチロックブレーキ(42)を備えた車両のオートマチック機械式トランスミッションシステム(10)である。該システムは、前記車両の少なくとも一つの運転状態を検知するための第1センサ(33,35,39)、前記車両の車輪ロックアップコンディションを検知するための第2センサ(54)と、ロジック制御ユニット(72,70,56)とを具備する。前記ロジック制御ユニットは、前記第1および第2センサから信号を受信するように構成されている。該ロジック制御ユニットが、該第1センサが前記車両の第1所定運転状態と通信して該第2センサが車輪ロックアップコンディションと通信した時に前記車輪からの前記駆動系の解離を指示する。あるいは、該ロジック制御ユニットが、前記車両の第2所定運転状態と車輪ロックアップコンディションとが通信された時に該駆動系と該車輪との嵌合を指示する。 (もっと読む)
原動機を備えた車両のブレーキ装置作動方法
【課題】原動機を備えた車両の発進をスムーズにし、同時に安全性も最大限に向上させるための、パーキングブレーキの解除時間を短縮したパーキングブレーキの作動方法を提供すること。
【解決手段】車輪回転数センサ12,13により検出された回転数が入力される電子制御ユニット6と、制御ユニット1と、該制御ユニット1により作用力が負荷されるドラムブレーキ4とから成る、原動機を備えた車両用のパーキングブレーキの作動方法であって、前記電子制御ユニット6が、前記制御ユニット1を前記パーキングブレーキを解除するよう制御する前記パーキングブレーキの作動方法において、前記車両が発進しようとし、且つ、前記パーキングブレーキが作用している状態で、前記電子制御ユニット6が、前記車両が位置する場所の進行方向に対する勾配に応じて前記パーキングブレーキの作用力を軽減するよう前記制御ユニットを制御する。 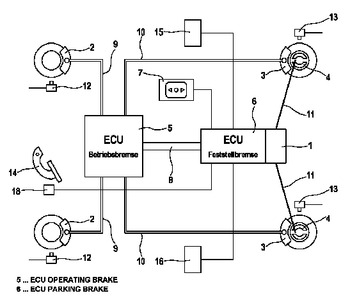 (もっと読む)
(もっと読む)
トレーラが横揺れしているときの自動車のドライバの支援方法および装置
【課題】限界走行状況において車両を安定化させるときにドライバを支援し、誤ったブレーキ係合を回避させる、トレーラが横揺れしているときの自動車のドライバを支援する方法および装置を提供する。
【解決手段】横揺れしているトレーラを連結している車両は、第1の状態(1)において、少なくとも1つの車両状態変数(ay、vGi)の評価によりトレーラ振動が評価され、第2の状態(2)において、限界振動が検出されたとき、ドライバにブレーキ操作を命令するために、ドライバに警告が出力され、ドライバがブレーキ操作を開始した場合、ブレーキ過程において、ドライバは、車両ブレーキが自動的に操作されることにより支援され、この場合、ブレーキ圧力(Pso)が設定され、このブレーキ圧力(Pso)により最適な車両の減速が達成される。
(もっと読む)
41 - 55 / 55
[ Back to top ]