
Fターム[3D246HA81]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | ヨーレート (774)
Fターム[3D246HA81]に分類される特許
1 - 20 / 774
車両の制動制御装置
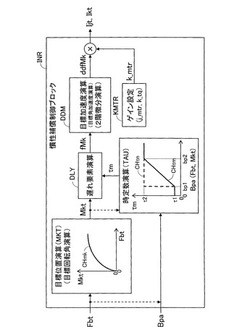
【課題】電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供すること。
【解決手段】この装置では、制動操作部材の操作量Bpaに基づいて演算された目標通電量に基づいて電気モータが制御される。ブレーキアクチュエータの応答を表す時定数τmを有する遅れ要素DLY、及び、操作量Bpaに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償通電量Ijt,Iktが演算される。この慣性補償通電量Ijt,Iktに基づいて前記目標通電量Imtが演算される。
(もっと読む)
ブレーキ制御装置

【課題】 走行中にパーキングブレーキ機構への作動要求がなされたときの車両挙動の乱れを抑制できるブレーキ制御装置を提供する。
【解決手段】 油圧ユニットECU2は、判定された走行状態が走行中のときにスイッチ操作によって電動パーキングブレーキの作動要求があった場合に電動パーキングブレーキの作動を制限し、油圧ユニット1を作動させて4輪に制動力を発生させる。
(もっと読む)
車両の制動制御装置
【課題】電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供すること。
【解決手段】この装置では、制動操作部材の操作量Bpaに基づいて演算された目標通電量に基づいて電気モータが制御される。操作量Bpaに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償制御が必要であるか否かが判定される。慣性補償制御が必要であると判定された場合(FLj←1、又は、FLk←1)、ブレーキアクチュエータの最大応答に基づく予め設定された時系列のパターンCHj,CHkに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償通電量Ijt,Iktが演算される。この慣性補償通電量Ijt,Iktに基づいて前記目標通電量が演算される。
(もっと読む)
車両の障害物回避装置
【課題】
減速による障害物回避と横移動による障害物回避とを適切に選択できる車両の障害物回避装置を提供すること。
【解決手段】
自車両前方の障害物を認識する障害物認識部11と、自車両が走行している左右両側の車線の車線境界線を認識する車線境界線認識部12と、認識された障害物と認識された車線境界線との間隔Wl,Wrを認識する間隔認識部14と、認識された間隔Wl,Wrが予め設定された自車両の幅Wv以下である方向への横方向への障害物回避を禁止し、間隔Wl,Wrが自車両の幅Wvより大きい方向への横方向への障害物回避を許可し、自車両が認識された車線境界線を跨いで走行しているときには横方向への障害物回避を許可し、横方向への障害物回避が禁止された場合には車両を減速させる回避方向選択部15と、を備えた。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
路面摩擦係数推定装置および車両用ブレーキ液圧制御装置
【課題】横加速度に基づく路面摩擦係数の推定を精度よく行うことを目的とする。
【解決手段】路面摩擦係数推定装置は、横加速度に基づいて第1の路面摩擦係数CF1を推定する第1の推定手段25と、前後加速度に基づいて第2の路面摩擦係数CF2を推定する第2の推定手段26と、路面摩擦係数CF1,CF2の小さい方を路面摩擦係数CFとする選択手段27を備える。選択手段27は、路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数CFとして選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数CFとして選択する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】走行ラインのトレース性を向上させることができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備える。アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、旋回判定手段によって車両が旋回していると判定された場合には、減圧閾値を直進時の減圧閾値Sf1,Sr1よりも減圧しやすい値Sf2,Sr2に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量Pf1,Pr1よりも大きな値Pf2,Pr2に変更する旋回減圧制御を実行する。
(もっと読む)
車両の走行制御方法及び走行制御装置
【課題】衝突回避制御に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、運転者による車両1の操舵に対応する衝突回避軌道を選択し、選択した衝突回避軌道に基づいて走行するように車両1を制御する。これにより、衝突回避制御によって運転者が行っている車両操作、換言すれば運転者の反応が妨げられ、衝突回避制御に対し運転者が違和感を感じることを防止できる。
(もっと読む)
車両の制動制御装置
【課題】エンジンブレーキが発生する場合においても、ガタ詰めが必要なモードにおいては、ガタ詰めが適切に機能する制動制御装置等を提供する。
【解決手段】自車両に備わる制動制御装置は、本制動の前に、自車両のディスクロータとブレーキパッドとの隙間を詰める事前制動を実行する事前制動部と、自車両の駆動力に基づいて、事前制動部による制動力を算出する算出部と、エンジンブレーキにより自車両の制動を実行するエンジンブレーキ制動部と、事前制動部による事前制動が必要であるか否かを判定する判定部と、事前制動部による制動を制御する制御部とを備え、制御部は、エンジンブレーキ制動部による制動力が、算出部によって算出された事前制動部による制動力よりも大きく、かつ、判定部による判定結果が肯定である場合に、事前制動部による制動を実行する。
(もっと読む)
車両の制動制御装置
【課題】各モータのうち何れか一つのモータが過熱モータになった場合に、該過熱モータを保護するためのモータ保護制御の実行機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる車両の制動制御装置を提供する。
【解決手段】各車輪に個別対応する各電動ブレーキ装置はモータをそれぞれ備える。各電動ブレーキ装置を制御するブレーキ用ECUは、温度Tが第1の設定閾値Tth1以上となる過熱モータがあるか否かを判定する。そして、ブレーキ用ECUは、過熱モータが一つのみである場合(第3のタイミングt3)、過熱モータに対する電流値Ixを過熱モータの温度Tが低温である場合には高温である場合よりも緩やかな勾配で低下させる。
(もっと読む)
車両盗難防止制御装置
【課題】車外からの指令に基づいて安全に車両を停止させられる車両盗難防止制御装置を提供する。
【解決手段】車外からの外部停車要求が出されると、それに基づいて車両を停止させる。そして、車両を停止させる際に、所定の減速度、具体的には一定の基準減速度で停止させるようにする。このように、一定の基準減速度で車両を停止することで、急停車させたりすることなく安全に車両を停止させることが可能となる。
(もっと読む)
車体挙動安定化装置
【課題】制動制御装置および駆動制御装置を用いた車体挙動安定化装置において、車体挙動安定化制御用のアクチュエータが異常となったときに車体挙動を安定化させる。
【解決手段】モータ・ジェネレータ5および/またはエンジン8の駆動力を制御することで第1の車体挙動安定化制御を実行する駆動制御指令部36と、ブレーキアクチュエータ12c〜12fを駆動制御して前後左右の車輪2・3の制動力を独立制御することで第2の車体挙動安定化制御を実行する制動制御部35と、ブレーキアクチュエータの異常を検出する異常検出部37とを備えた車体挙動安定化装置1において、異常検出部37がブレーキアクチュエータの異常を検出した場合、制動制御部35が2の車体挙動安定化制御を停止するとともに、駆動制御指令部36に対して車体挙動安定化制御の実行指令を出力し、駆動制御指令部36が単独で第1の車体挙動安定化制御を実行するようにする。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
車両の制御装置
【課題】旋回走行時の車両挙動を安定させる旋回性向上制御を、運転者に違和感やショックを与えることなく、適切に実行することができる車両の制御装置を提供すること。
【解決手段】駆動力および制動力を制御して旋回走行時の車両挙動を安定させる旋回性向上制御を実行する車両の制御装置において、操舵角および操舵角速度を基に推定した横加速度および横ジャークの推定値に基づいて前記駆動力および前記制動力の第1制御量を設定する第1制御量設定手段(ステップS2)と、センサを用いて検出した横加速度および横ジャークの検出値に基づいて前記駆動力および前記制動力の第2制御量を設定する第2制御量設定手段(ステップS3)と、前記第1制御量の絶対値と前記第2制御量の絶対値とのいずれか大きい方を選択して前記旋回性向上制御を実行する旋回性向上制御実行手段(ステップS4)とを設けた。
(もっと読む)
車両の運動制御装置
【課題】
日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】
前輪及び後輪の駆動力又は/及び制動力を制御可能な車両の運動制御装置において、横軸に車両の前後加速度、縦軸に車両の横加速度をとるダイアグラムを定義したときに、時間の経過とともに当該ダイアグラム上で曲線的な遷移をするように加減速制御指令を決定するコントローラと、加減速制御指令に基づいて、制動力又は/及び駆動力を決定する制動力駆動力配分部と、を有する。
(もっと読む)
先行車追従走行装置及び運転支援システム
【課題】先行車追従走行を行うものにおいて、燃費の悪化をより抑制することを可能にする。
【解決手段】先行車の速度と、車車間通信で取得した先行車と同一道路上の先行車の進行方向前方に位置する先行車前方車の速度情報とをもとに、当該先行車前方車の速度が先行車の速度よりも所定値以上小さいか否かを判定する。そして、肯定判定した場合であって、且つ、自車の速度が先行車の速度以下の場合には、先行車追従制御を中断し、自車の速度を維持することで加速を抑制する。
(もっと読む)
車両の制御装置
【課題】旋回走行時の車両挙動を安定させるための駆動力制御および制動力制御を、運転者に違和感やショックを与えることなく、適切に実行することができる車両の制御装置を提供すること。
【解決手段】操舵角および横加速度に基づいて駆動力もしくは制動力を補正して変化させることにより、旋回走行時の車両挙動を安定させる制駆動力制御を実行可能な車両の制御装置において、ステアリングの切り込み操作および戻し操作における操作時間および/または操作速度を検出するステアリング操作検出手段(ステップS105,S106,S107,S108)と、前記切り込み操作および前記戻し操作が行われる際に、前記操作時間もしくは前記操作速度に基づいて、前記補正により前記駆動力もしくは前記制動力を変化させる際の変化速度を設定する制駆動力設定手段(ステップS110,S111)とを設けた。
(もっと読む)
車両挙動制御システム
【課題】車両の挙動を安定化させることができる車両挙動制御システムを提供することを目的とする。
【解決手段】車両2の各車輪3に生じる制動力を個別に調節可能な制動装置7と、制動装置7を制御して車輪3のスリップ状態を制御するABS制御及び車両2の旋回状態を制御する旋回制御を実行可能な制御装置8とを備え、制御装置8は、ABS制御及び旋回制御の作動中に、車両2に作用する横方向加速度の絶対値が予め設定された所定加速度以下である場合に制動力の増加勾配を制限する一方、横方向加速度の絶対値が所定加速度より大きい場合に制動力の増加勾配を制限せず、さらに、制御装置8は、旋回制御における旋回制御量の絶対値が予め設定された所定制御量より大きい場合には制動力の増加勾配を制限しない。
(もっと読む)
車両の運動制御装置
【課題】簡単な構成でハンドル角が小さな低横加速度旋回領域とハンドル角が大きな高横加速度旋回領域を含む全横加速度旋回領域において車両の運動状態を的確に制御して操縦安定性を高めることができる車両の運動制御装置を提供すること。
【解決手段】車速とハンドル角に基づいて目標ヨー角速度を算出し、算出された目標ヨー角速度と実際のヨー角速度との偏差が実質的に0になるよう車両の運動を制御するECU(制御手段)と、を備える車両の運動制御装置において、前記ECUは、ハンドル角が所定の閾値よりも小さい低横加速度旋回領域においてはハンドル角に比例する目標ヨー角速度を使用し、ハンドル角が前記閾値よりも大きい高横加速度旋回領域においてはハンドル角に依存しない最大横加速度で車両が定常円旋回するときのヨー角速度を目標ヨー角速度として使用して車両の運動を制御する。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
1 - 20 / 774
[ Back to top ]