
Fターム[3D246HA96]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車高、重心高 (28)
Fターム[3D246HA96]に分類される特許
1 - 20 / 28
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
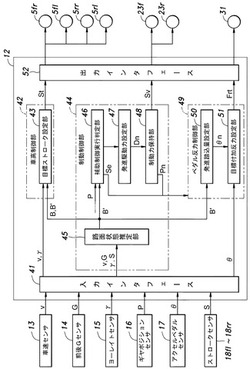
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法

【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
液圧ブレーキシステム
【課題】液圧ブレーキシステムの制御系の異常時の走行安全性の向上を図る。
【解決手段】車両の重心G1が左右方向の中心から右側にある場合には、重心G1から右側の前後輪の接地点までのアームが、左側の前後輪の接地点までのアームより短くなる。それに対して、制御系の異常時に、メカ式増圧装置96の出力液圧が右前輪4,右後輪48,左前輪2のブレーキシリンダに供給されるため、右側の前後輪4,48に加えられる制動力の合計が左側の前後輪2,46に加えられる制動力の合計より大きくなる。その結果、車両にヨーモーメントが生じ難くすることができる。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
車両用制御装置
【課題】高価な部品を必要とせず、簡素な構成により車両の誤発進を防止し得る技術を提供すること。
【解決手段】車両用制御装置1は、車両の車高が一定値を超える変化を生じたか否かを判定する車高変化判定部21と、車高変化判定部により車高が一定値を超えたと判定されたときに、車両のギアポジションに基づいて車両の進行方向を判定する第1の進行方向判定部22と、第1の進行方向判定部による判定結果を示す進行方向データを記憶する不揮発メモリ11と、車両のギアポジションに基づいて車両の進行方向を判定する第2の進行方向判定部24と、不揮発メモリから進行方向データを読み出し、当該進行方向データにより示される車両の進行方向と第2の進行方向判定部により判定された車両の進行方向とが同一であるときに、車両の誤発進を防ぐための制御信号を出力する制御信号出力部25を備える。
(もっと読む)
横転抑制制御装置および横転抑制制御方法
【課題】横転抑制制御に係る制動力に起因するアンダステアの発生を抑制することにより、ロール抑制をしつつ旋回トレース性を確保する横転抑制制御装置および横転抑制制御方法を提供する。
【解決手段】横転抑制制御装置は、非アンダステア状態である旨を検出した場合には、制御閾値を第1制御閾値に設定するとともに、アンダステア状態である旨を検出した場合には制御閾値を第1制御閾値より大きい第2制御閾値に設定し(ステップ108,110,114)、検出された横転状態値が設定された制御閾値より大きい場合には、車両の車輪に制動力を付与することにより車両の横転を抑制する横転抑制制御を行う(ステップ118,120)。
(もっと読む)
車両運動制御装置
【課題】ロール角が大きくなることを抑制しつつ、さらにアンダーステアを増大させる必要が無くなったときに、早期にアンダーステアの増大を抑制することができるようにする。
【解決手段】実横加速度Gyrが目標横加速度Gth以上であったとしても、舵角横加速度Gysとヨーレート横加速度Gyyの少なくとも一方が目標横加速度Gth未満になったときに、制御対象輪のW/C圧の増圧を禁止するようにしている。このため、横転を抑制するために積極的にアンダーステアを発生させるようにしてロール角が大きくなることを抑制しつつ、さらにアンダーステアを増大させる必要が無くなったときに、早期にアンダーステアの増大を抑制することが可能となる。
(もっと読む)
車両の前後加速度修正装置を備えた車両の諸元推定装置、及び車両の前後加速度修正装置
【課題】
前後加速度の誤差を考慮して、車両の積載量によって変化する車両諸元(例えば、車両重量)を精度良く推定するための前後加速度の修正装置を提供する。さらに、この前後加速度修正装置によって推定された前後加速度の情報に基づいて高精度に車両諸元を推定する。
【解決手段】
車両の前後加速度修正装置は、車両の前後加速度(Gxa)を取得する前後加速度取得手段(GXA)と、前記車両に作用する走行抵抗(Grr)を取得する走行抵抗取得手段(GRR)とを備え、前記前後加速度(Gxa)から前記走行抵抗(Grr)を除いて修正加速度(Gxs)とする。車両の諸元推定装置は、加速操作量取得手段(ASA)によって取得される加速操作量(Asa)、或いは、減速操作量取得手段(BSA)によって取得される減速操作量(Bsa)と、前記修正加速度(Gxs)とに基づいて、前記車両諸元を推定する。
(もっと読む)
車両運動制御装置
【課題】加速旋回を含んだ走行状態にある車両の加速性を維持しつつ、車両を安定して走行させることが可能な車両運動制御装置の提供。
【解決手段】車両Mの駆動輪Wfl,Wfrの空転量が所定の閾値よりも大きい場合、ブレーキ制御ECU26は通常の空転抑制制御を実行し、空転傾向にある駆動輪Wfl,Wfrに制動力を付与する。車両Mの加速旋回状態が検出され、かつ、アンダステア状態が検出された場合、旋回内側の駆動輪Wfl,Wfrの空転量の閾値を通常の空転抑制制御時の閾値よりも大きくし、旋回内側の駆動輪Wfl,Wfrへの制動力の付与を抑制し、その空転を許容する。また、車両Mの加速旋回状態が検出され、かつ、アンダステア状態が検出された場合、旋回外側の駆動輪Wfl,Wfrの空転量の閾値を通常の空転抑制制御時の閾値よりも小さくし、外側の駆動輪Wfl,Wfrへの制動力の付与を増大させる。
(もっと読む)
車両運動制御装置
【課題】横転抑制制御を行う必要がないときにまで横転抑制制御が行われてしまうことを防止する。
【解決手段】横転抑制制御の開始条件(Gy>Gs)が満たされることによって一旦横転抑制制御が開始されたとしても、横転抑制制御開始から待ち時間T1が経過した時点で横転抑制制御を継続するべきか中断すべきかを判定する。そして、横転抑制制御を中断すべきと判定されたときに、横転抑制制御の開始条件を満たしていてもそれを継続しないようにする。これにより、本来横転に至らない状況まで横転抑制制御が継続されてしまうことを抑制することができる。
(もっと読む)
車両の重心の高さを推定する方法
本発明は、各々少なくとも2つの車輪を有する少なくとも前車軸及び後車軸を備える車両の重心の高さを推定する方法に関し、前記方法は、a)実質的に同じ勾配を有する道路部分に沿って発生する第1制動時間及び第2制動時間であって、該第1制動時間及び該第2制動時間によって、異なる車両減速が起こる両制動時間を決定してから、両制動時間において、少なくとも以下の変数、−車両の加速(Acc)、−前車軸及び後車軸についての車輪スリップ率(WSR)、−前車軸及び後車軸の各々での制動力(Bkf)又は制動トルク、又はその比(K)、並びに−対応する道路部分の勾配(Slp)を推定するステップと、b)両方の時間に実施されるステップa)の推定値のみを用いて、車両の重心高さ(H)を推定するステップとを含む。 (もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両統合制御装置
【課題】車両安定性制御装置とサスペンション制御装置とを統合して、車両の走行安定性を高める。
【解決手段】オーバーステア時には、旋回外側の前輪3に制動力F1を加えて、車両1に旋回内向きのモーメントを発生させ、また、アンダーステア時には、車両1の旋回内側の後輪4に制動力F2を加えて、車両1に旋回外向きのモーメントを発生させると共に、旋回外側の前後輪3,5に適度な制動力F3,F4を加えて、車両1を減速させることによって車両1の安定性を確保する。このとき、制動力が加えられた車輪に対して、縮み側減衰力を大きくし、伸び側減衰力を小さくし、かつ、懸架ばねのばね力を小さくする。同時に、その他の車輪に対応する縮み側減衰力を小さく、伸び側減衰力を大きくする。これにより、制動力が加えられた車輪の接地荷重を大きくすることができ、車両安定性を向上させる。
(もっと読む)
車両の重心位置推定装置
【課題】 車軸荷重を検出する特別なセンサを要せずに、車両の走行中でも、車両重心の前後方向位置(車両の重心−前後輪の車軸間距離)を推定することのできる車両の重心位置推定装置を提供すること。
【解決手段】 本発明の車両の重心位置推定装置は、車両の制動中に車両の前輪の車輪速度と後輪の車輪速度との差の大きさが所定の大きさとなった時又はEBD制御が実行されたときの前輪の制動力と後輪の制動力と車両の減速度とに基づいて車両の前後方向に於ける重心位置を推定することを特徴とする。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】姿勢制御機能を有する車両の、悪路での乗り心地を改善する。
【解決手段】姿勢制御用のコントローラ103は、センサ群102から供給される路面状況に基づいて、車両の運動及び姿勢を制御するアクチュエータ131〜139の制御量を制御し、路面が悪路になると、姿勢制御のゲインを下げ、トルクを増加させることにより、サスペンションによらず、乗り心地を改善する。悪路の判定は、単位時間あたりの加速度の変動回数の検出、車輪の乗り上げの検出などにより行う。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とする。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御する制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
アンチ・ロールオーバー・ブレーキ装置
【課題】自動車の摩擦ロールオーバーを防止するブレーキ装置を提供する。
【解決手段】ブレーキ装置は、自動車のそれぞれの車輪の回転に抵抗する圧力を加える1組のブレーキ50,52,54,56と、自動車をロールオーバーさせようとする所定の力に応じてロールオーバー信号を生み出すセンサー58と、ロールオーバー信号に応じて所定のプログラムでブレーキを駆動する制御装置60とを有している。本発明の一実施形態によれば、コントローラーは、ロールオーバー信号に応じて両方の前輪ブレーキを作動する。本発明の他の実施形態によれば、コントローラーは、ロールオーバー信号に応じてもっとも負荷の大きな前輪タイヤを制動する。
(もっと読む)
重心高推定装置、及びこれを備えた車両挙動制御装置
【課題】重心高の推定精度の向上が図られた重心高推定装置、及びこれを備えた車両挙動制御装置を提供すること。
【解決手段】車両の実際の横加加速度(横加速度)及びロールレートに基づいて算出された伝達特性である実測伝達特性と、車両の運動特性を表現した車両モデルに基づいて算出された伝達特性である解析伝達特性とを比較して、車両の重心高を推定する重心高演算部6を備える構成であるため、路面状況、タイヤ特性の違いなどの外的要因に左右されない伝達特性を定義可能であり、推定精度の向上を図ることができる。
(もっと読む)
車両制御装置
【課題】制動偏向を低減し、制動時における車両安定性を向上させることが可能な車両制御装置を提供すること。
【解決手段】直進制動状態において、左右軸重差を減少させることで、車両10の左右方向の重量バランスを補正して、制動偏向を低減させる。この車両制御装置30では、複数の燃料室70A〜70Dを有する構成とし、左右軸重差に基づいて、燃料室間で燃料の移送を行うことで、重量バランスを補正して、制動偏向を低減し、車両の安定性の向上を図る。
(もっと読む)
車両用走行制御装置及びその方法
【課題】運転者に違和感を与えることなく、カーブ路に対応して自車両を制御する。
【解決手段】車両用走行制御装置は、ナビゲーションシステムから得たカーブ曲率を基に、自車両の前方のカーブ路に対応して警報出力制御及び自動減速制御を行っている。車両用走行制御装置は、自車両の前方のカーブ路に存在する道路上等表示を認識し、その認識した道路上等表示を基に、カーブのきつさ度合いを推定し(ステップS6、ステップS7)、推定したカーブのきつさ度合いを基に、警報出力制御及び自動減速制御を補正する(ステップS8、ステップS14)。
(もっと読む)
1 - 20 / 28
[ Back to top ]