
Fターム[3D246HA97]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 重量 (143)
Fターム[3D246HA97]の下位に属するFターム
輪荷重、軸荷重 (77)
Fターム[3D246HA97]に分類される特許
1 - 20 / 66
車体速度制御装置
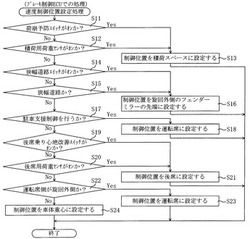
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
車両のエンジン自動停止制御装置

【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
電動パーキングブレーキ制御システム
【課題】部品点数を増加させることなく、温度に応じた目標荷重値を設定することができる電動パーキングブレーキ制御システムを提供することを目的とする。
【解決手段】車両の車輪を制動するパーキングブレーキと、前記パーキングブレーキをコントロールケーブルを介して作動または解除するアクチュエータと、外気温センサと、荷重センサと、前記アクチュエータを制御する制御部とを備えた電動パーキングブレーキ制御システムであって、前記制御部は、連続する複数の温度領域に区分された温度領域情報に基づいて、前記外気温センサからの外気温の時系列において、前記パーキングブレーキの作動より以前の所定時間内における外気温が属する温度領域のうちの低温度側の温度領域を特定し、特定された温度領域に応じた目標荷重値まで到達するように前記アクチュエータの駆動を制御することを特徴とする電動パーキングブレーキ制御システムを用いる。
(もっと読む)
隊列走行制御装置
【課題】製造コストの増加を抑えつつ、先頭車両におけるフルブレーキ制動時の隊列走行の安定化を図ることができる隊列走行制御装置を提供することを目的としている。
【解決手段】手動又は自動運転される先頭車両1aに後続車両1bを自動追従させる隊列走行制御装置において、前走車両1aにおけるブレーキチャンバ32に加圧される最大エア圧よりも、自車両1bにおけるブレーキチャンバ32に加圧される最大エア圧を高い値に設定する調圧弁(比例制御弁)34aと、調圧弁34aを迂回するバイパス通路34eと、を備えたエアブレーキ手段(エアブレーキシステム)20a,20bと、隊列走行時、調圧弁34aを介してエアをブレーキチャンバ32に供給し、非隊列走行時、バイパス通路34eを介してエアをブレーキチャンバ32に供給するように切り替える隊列走行制御手段(統合コントローラ)10と、を備えた。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】走行条件や車両条件に応じてブレーキ力を制御し、滑走の発生頻度を低減させることを可能とするブレーキ制御装置およびブレーキ制御方法を得ること。
【解決手段】複数の車両により構成される列車を制動させるブレーキ力を演算するブレーキ力演算部5と、車両の車輪の滑走を検知した際の車両のブレーキノッチ位置および走行速度を含む走行情報、および滑走情報を記録し、走行情報と滑走情報とに基づいて滑走予測を行い、ブレーキ力に対する車両毎、台車毎、あるいは軸毎の分担ブレーキ力の割合を示すブレーキ分担率を演算する滑走抑制制御部12と、ブレーキ力とブレーキ分担率とに基づいて分担ブレーキ力を設定し、基礎ブレーキ装置にブレーキ制御信号を出力するブレーキ力設定部6と、を備える。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両の走行する路面の勾配情報に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切なタイミングで開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の走行する路面の勾配情報を取得し、該勾配情報に基づき第1の減速判定値DV_stを補正する(ステップS79)そして、ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えると共に、Gセンサ値Gが第2の減速判定値G_stを超えた場合に(ステップS84,S89:YES)、補助制御を開始する。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
アンチスキッド制御装置
【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
坂道発進補助制御装置
【課題】坂道発進補助制御が無用に解除されることを防止できる坂道発進補助制御装置を提供する。
【解決手段】車両が登坂路で停止状態であるときにドライバーがブレーキペダルから足を放しても車両が後退しないように制御する後退防止制御部(S1)と、駆動輪に伝達される駆動トルクを、モータージェネレーターと駆動輪との間に配置される駆動輪側クラッチが解放され始めてから再び締結されて所定時間が経過するまでは駆動輪側クラッチの伝達トルクと変速機への入力トルクとのいずれか小さいトルクに基づいて推定し、所定時間が経過した後は変速機への入力トルクに基づいて推定するトルク推定部(S7,S8)と、推定された駆動トルクが後退防止判定値よりも大きいか否かを判定する判定部(S9)と、推定された駆動トルクが後退防止判定値よりも大きいときには後退防止制御部による制御の中止を許可する後退防止制御中止部(S10)と、を備える。
(もっと読む)
車両のブレーキ制御装置および編成列車のブレーキ制御装置
【課題】従来は回生ブレーキと空気ブレーキの協調制御において空気ブレーキの応答遅れを実回生ブレーキ力に所定の補正量を付加することで補っていたため、車両状態および気温等の外部状態に応じて毎回異なる空気ブレーキの応答遅れに対応できず、回生ブレーキと空気ブレーキの総和が必要なブレーキ力と一致しなかった。
【解決手段】車両のブレーキ制御装置に出力可能な回生ブレーキ力を推定する手段を設け、推定された回生ブレーキ力と必要ブレーキ力から空気ブレーキ力の指令値を決定し、回生ブレーキ力の指令値は必要ブレーキ力と実際に作用した空気ブレーキ力からを決定することで、ブレーキ力の総和を必要ブレーキ力に一致させることができ、さらに現車での補正量調整が不要となる。
(もっと読む)
車両の坂道発進補助装置
【課題】坂道発進補助制御により一旦停止で制動状態に保持した車両を特別な操作を要することなく制動解除してクリープ走行を開始でき、もってクリープ現象の利点を十分に活かすことができる車両の坂道発進補助装置を提供する。
【解決手段】車両の一旦停止時にアイドルストップ制御によりエンジンを停止させると共に(S6)、坂道発進補助制御により車両を制動状態に保持し(S8)、その後に運転者による車両発進の意志表示に基づきアイドルストストップ制御によりエンジンを始動し(S12,14)、それに伴うクラッチ装置の半クラッチ制御の再開によりクリープトルクが増加して制動解除判定値に達すると、車両の制動を解除する(S16,18)。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
車両の制御装置
【課題】坂路で車両を停止させる際、制動装置を制御するソレノイドバルブの作動回数を抑制すると共に、車両の移動を抑制することができる車両の制御装置を提供する。
【解決手段】坂路においてブレーキペダル36の踏み込みが解除されても、制動手段100によって車速Vの上昇が制限されるため、規定時間Ta内ではパーキングロック可能な車速Vに制限される。したがって、パーキングレンジが選択された際に、ブレーキ油圧Pbkを制御するソレノイドバルブ50を再度作動させることが防止され、ソレノイドバルブ50の作動回数増加による耐久性低下が抑制される。また、ブレーキペダル36の踏み込みが解除されると、ホイールブレーキ46のブレーキ油圧Pbkが急激に低下せず、所定の勾配ΔPで低下するに従い制動力が発生するため、その車両の移動が抑制される。
(もっと読む)
衝突被害軽減装置、及びその方法
【課題】交差点における停止線で停止している自車両に後続車両が追突するときに、交差車線、或いは横断歩道に飛び出してしまう可能性を可能な限り低くし、且つ、上述した追突の被害を可能な限り低くできる衝突被害軽減装置、及びその方法を提供する。
【解決手段】後続車両に追突されたときの被害を自車両の制動力を制御して軽減する衝突被害軽減装置であって、自車両が追突されたときに生じるエネルギーを推定する推定手段と、交差点において停車している自車両から予め定められた停止位置までの距離を測定する測定手段と、エネルギーと停止位置までの距離とに基づいて自車両の制動力を予め制御する制動力制御手段とを備える。
(もっと読む)
ブレーキ制御装置およびこれを備えたブレーキシステム
【課題】ヒルホールド機能の作動解除の操作性を向上するとともに、ヒルホールド機能を安定して制御する。
【解決手段】ブレーキ制御装置15の必要トルク演算部19は、勾配情報および車両諸元情報に基づいて車両が登坂路を発進するために必要な必要トルクを演算する。車両負荷度演算部20は、勾配情報および車両諸元情報に基づいて車両の負荷度を演算する。この車両負荷度に基づいて、ブレーキ解除点補正値演算部21がブレーキ解除点補正値を演算する。そして、このブレーキ解除点補正値に基づいて、必要トルク補正部22が必要トルクを補正し、補正された必要トルクに基づいてブレーキ解除の許可を判定する。
(もっと読む)
車両運動制御装置
【課題】不必要に横転抑制制御が為されることを抑制しつつ、車両状態に対応した横転抑制制御を行うことが可能な車両運動制御装置を提供する。
【解決手段】車両への積載重量に応じて横転抑制制御を許可する基準値となるしきい速度Vtを変化させる。このため、積載重量が大きく、横転し易い車両状態のときには、車速がより低速となっても横転抑制制御が実行されるようにすることができる。これにより、車速が横転傾向情報に応じた速度となるまで横転抑制制御を行うことが可能となる。また、車両への積載が行われていない非積載状態のときにはしきい速度Vtが大きな値となるため、車両が横転する可能性がないような場合にまで不必要に横転抑制制御が実行されてしまうことを抑制することができる。よって、不必要に横転抑制制御が為されることを抑制しつつ、車両状態に対応した横転抑制制御を行うことが可能となる。
(もっと読む)
車両の制駆動力制御装置
【課題】車両の制駆動力制御装置において、走行抵抗の大きな路面であっても、最適な制動力により車両を停止することで容易に再発進を可能とする。
【解決手段】車両11が走行する路面の走行抵抗を検出する走行抵抗検出部62と、駆動力の余剰分を検出する駆動力余剰分検出部63と、ドライバの要求制動力を算出する要求制動力算出部64と、路面の走行抵抗が予め設定された所定の走行抵抗より大きいときに要求制動力から駆動力の余剰分を減算して目標制動力を算出する目標制動力算出部65とを設ける。
(もっと読む)
車両の前後加速度修正装置を備えた車両の諸元推定装置、及び車両の前後加速度修正装置
【課題】
前後加速度の誤差を考慮して、車両の積載量によって変化する車両諸元(例えば、車両重量)を精度良く推定するための前後加速度の修正装置を提供する。さらに、この前後加速度修正装置によって推定された前後加速度の情報に基づいて高精度に車両諸元を推定する。
【解決手段】
車両の前後加速度修正装置は、車両の前後加速度(Gxa)を取得する前後加速度取得手段(GXA)と、前記車両に作用する走行抵抗(Grr)を取得する走行抵抗取得手段(GRR)とを備え、前記前後加速度(Gxa)から前記走行抵抗(Grr)を除いて修正加速度(Gxs)とする。車両の諸元推定装置は、加速操作量取得手段(ASA)によって取得される加速操作量(Asa)、或いは、減速操作量取得手段(BSA)によって取得される減速操作量(Bsa)と、前記修正加速度(Gxs)とに基づいて、前記車両諸元を推定する。
(もっと読む)
衝突被害軽減装置
【課題】自車両に先行する第1障害物の衝突被害の軽減を図る。
【解決手段】レーダの各種測定結果に基づいて、第1障害物と自車両に先々行する第2障害物とを特定できたときに、第1障害物の第1速度Vo1及び第2障害物の第2速度Vo2が第1所定閾値Vt以下、第1、第2障害物間の距離Ddが第2所定閾値Dt以下、且つ、第1障害物のレーダ反射断面積Soが第3所定閾値St以下である所定状態であるか否かを判定する(S14)。そして、所定状態であれば、第1障害物と第2障害物とが接近して連なった低速走行状態又は停止状態であると判定して、衝突距離DLoをより長い距離DL1に変更すると共に、所定減速度αoをより大きい減速度α1に変更する(S17,S18)。このため、ブレーキ作動タイミングを早期化させ、より大きな減速度を発生させられるので、第1障害物の衝突被害の軽減が図られる。
(もっと読む)
1 - 20 / 66
[ Back to top ]