
Fターム[3D246HB00]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668)
Fターム[3D246HB00]の下位に属するFターム
Fターム[3D246HB00]に分類される特許
1 - 3 / 3
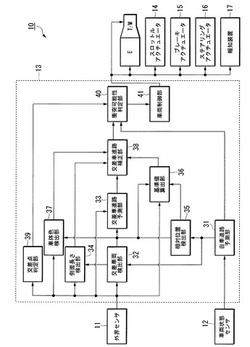
車両の走行安全装置
【課題】自車両と他車両との衝突可能性の有無を精度良く判定する。
【解決手段】車両の走行安全装置10は、自車両の進路を予測する自車進路予測部31と、自車両の進路と交差する進行方向で自車両に接近するように移動する接近交差車両を検出する交差車両検出部32と、接近交差車両の進行方向に基づいて、接近交差車両の進路を予測する交差車進路予測部33と、自車両の進路と接近交差車両の進路とに基づいて、自車両と接近交差車両との衝突可能性の有無を判定する衝突可能性判定部40と、自車両が位置する地点において該自車両によって認識される接近交差車両の側面長さLBを検出する側面長さ検出部34と、側面長さLBの時間的な変化に基づいて、接近交差車両の進路を補正する交差車進路補正部38とを備え、衝突可能性判定部40は、補正された接近交差車両の進路に基づいて衝突可能性の有無を判定する。
(もっと読む)
車両用速度制御装置

【課題】目的とする車速に向けて車速を低下させる場合に、運転者にとって操作の煩わしさや操作のしにくさをより生じにくくすることを可能にする。
【解決手段】車両の運転者からの操作入力を受けてON状態に切り替わったことを示す手動スイッチ信号を出力する手動スイッチ7と、手動スイッチ信号に従って、現在の設定車速から所定の量の速度を減じた新設定車速を算出する設定車速決定部11と、一定時間をかけて現在の設定車速から新設定車速へ移行するために逐次とるべき目標速度を算出する目標速度算出部12と、目標速度と現在車速との差をもとに、目標速度を実現するために必要な減速度である要求減速度を算出する要求減速度算出部13と、を備え、逐次算出される要求減速度に従った減速度で逐次減速を行わせていくことによって新設定車速に自車速を合わせる。
(もっと読む)
走行支援装置
【課題】運転者の意思に応じた走行制御を実行できる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車両周辺の環境情報から特定された制御に基づいて自車両が実行可能な走行制御が抽出され、その走行制御が複数存在する場合にその制御因子及び制御内容が運転者に対して表示される。そして、運転者が意図する一の走行制御の選択を受け付け、その一の走行制御が自車両において優先的に実行される。これにより、例えば追従対象や信号機等といった制御因子が複数存在する場合であっても、追従対象の変更や速度の変更等といった走行制御が自動で実行されずに、運転者の意思を確認してから実行されることになる。従って、運転者が不測の車両挙動に違和感を覚えることなく、運転者の意思に応じた走行制御の実行が可能となる。
(もっと読む)
1 - 3 / 3
[ Back to top ]