
Fターム[3D246HB24]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 外部装置からの情報 (624) | ナビ情報 (462)
Fターム[3D246HB24]の下位に属するFターム
自車の位置 (161)
Fターム[3D246HB24]に分類される特許
1 - 20 / 301
車両減速度制御装置
【課題】フェード現象やヴェイパーロック現象を抑制しつつ、ドライバに対して減速すべき状況であることを知らせることができる車両減速度制御装置を提供すること。
【解決手段】ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、エンジンブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置100であって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定し(S10,S11)、減速を開始するタイミングであると判定された場合に、エンジンブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う(S13)。
(もっと読む)
車両用走行支援装置

【課題】 交差点右折時に自車右側から交差点に進入してくる障害物との接触を回避できる車両用走行支援装置を提供する。
【解決手段】 自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
(もっと読む)
車両のパーキングロック制御装置
【課題】 電力消費を抑制可能な車両のパーキングロック制御装置を提供すること。
【解決手段】 本発明の車両のパーキングロック制御装置では、パーキングロック作動指令が出力されたときは、複数のパーキングロック機構のうち、何れか一方のパーキングロック機構を作動させ、一方のパーキングロック機構のみを作動させた場合に車両が移動すると推定又は検出されたときは、他方のパーキングロック機構を作動させることとした。
(もっと読む)
先行車追従走行装置及び運転支援システム
【課題】先行車追従走行を行うものにおいて、燃費の悪化をより抑制することを可能にする。
【解決手段】先行車の速度と、車車間通信で取得した先行車と同一道路上の先行車の進行方向前方に位置する先行車前方車の速度情報とをもとに、当該先行車前方車の速度が先行車の速度よりも所定値以上小さいか否かを判定する。そして、肯定判定した場合であって、且つ、自車の速度が先行車の速度以下の場合には、先行車追従制御を中断し、自車の速度を維持することで加速を抑制する。
(もっと読む)
悪路判定装置
【課題】容易且つ正確に車両が悪路を走行しているか否かを判定する。
【解決手段】悪路判定装置は、車両におけるブレーキペダルの操作変化率を検出する変化率検出手段と、ブレーキペダルの操作変化率の正負反転回数を検出する反転回数検出手段と、ブレーキペダルの操作変化率の正負反転回数が所定値以上になった場合に、車両が悪路を走行していると判定する判定手段とを備える。
(もっと読む)
車両の走行制御装置
【課題】制動条件の異なる2以上の制御モードを協調して車両を走行制御する際に、制御モードの切替を適切に行うことを可能とする。
【解決手段】互いに異なる制動条件で車両を制駆動制御する2以上の制御モードを協調制御して、走行状態に基づき採用する制御モードを切り替える車両の走行制御装置4である。走行路の勾配の状態に応じて、カーブ減速制御モードから一定速制御モードへの切替の閾値を変更する。具体的には、下り勾配であるほど、上記閾値を高くする。
(もっと読む)
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
移動体通信装置及び追突防止支援方法
【課題】感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故を未然に防ぐ追突防止支援を行う移動体通信装置及び追突防止支援方法を提供すること。
【解決手段】移動体に備えられ、感知器が検出した感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、を備える移動体通信装置であって、前記制御部は前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することとする。
(もっと読む)
車両の制駆動力制御装置及び制駆動力制御方法
【課題】段差を通過して間もない位置に車両を停止する必要があっても、急な速度変化が発生することを抑制可能とすることを目的とする。
【解決手段】車両の制動力及び駆動力を制御して、取得した目標位置に車両を誘導または駐車する車両の制駆動力制御する際に、段差を通過する際に生じる目標位置に対する車両の相対速度の変動に応じて駆動力指令値を増大する。但し、上記段差を乗り越えるために、当該段差に接触した車輪の上方への変位である車輪の浮き上がりと判定すると、上記付加駆動力分の指令値が小さくなるように、上記駆動力指令値の上昇を抑制する。そして、駆動力指令値の抑制中に制動指令を制動装置に出力する。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
前後加速度推定装置
【課題】車両の前後加速度又は路面摩擦係数若しくは路面状態の推定精度を向上させることが可能な前後加速度推定装置を提供する。
【解決手段】前後加速度推定装置22は、加速操作又は減速操作の開始時点における前後加速度センサ42の検出値と、その後の前後加速度センサ42の検出値との差を、車両10の前後加速度の推定値として算出する加速度推定手段110を有する。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段2と、自車両の位置を取得する自車位置取得手段3と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段4と、を有し、車両運動制御演算手段4は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算し、前記前後加速度指令値は、自車両前方のカーブ走行時に発生するであろう最大横加速度推定値、自車両前方の道路勾配、ドライバのペダル操作、旋回方向のうちの少なくともいずれか一つに基づいて変化する。
(もっと読む)
衝突危険度判定装置
【課題】衝突危険度を精度よく判定する。
【解決手段】衝突危険度判定装置100では、環境検出部5bにより移動物の位置分布及び移動状態分布を検出し、マップ生成部5cにより存在可能度マップを生成する。移動物生成部5d、位置更新部5e及び分布変更部5fにより、存在可能度マップ上にて移動物の将来位置分布を予測する。進路候補演算部5aにより、自車両10の進路候補を複数演算する。危険度候補演算部5hにより、存在可能度マップ上で複数の進路候補それぞれの衝突危険度候補を演算する。そして、危険度判定部5iにより、演算された複数の衝突危険度候補に基づき複数の進路候補のうち一の進路候補を選択し、選択した当該一の進路候補の衝突危険度候補を衝突危険度として判定する。ここで、危険度候補演算部5hは、移動コストと運動コストと衝突確率とに基づき衝突危険度候補を演算する。
(もっと読む)
車両運転支援装置
【課題】ドライバーの運転操作の経年的な衰えを検出し、検出した衰えに応じた車両運転の支援を行う。
【解決手段】ドライバーの年齢別およびブレーキ操作開始時の車速別に、車両のブレーキ操作開始から車両停止までの期間における、車両の減速挙動を表す減速挙動データ(制動距離、減速度の標準偏差)を、減速時学習データとして記録し、当該減速時学習データが記録された後、車両のブレーキ操作開始時(ステップ210)に、減速時学習データ中の最新の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、学習データ中の最新よりも過去の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、を比較し(ステップ220)、その比較結果に基づいて、ドライバーの運転能力が所定基準以上に衰えているか否かを判定し(ステップ230、240)、判定結果に応じて制動力を変化させる。
(もっと読む)
運転支援装置
【課題】複数の物体の近傍を通過する際に運転者にとって違和感の少ない運転支援を行うことができる運転支援装置を提供する。
【解決手段】本発明は、自車両前方の物体を検出する道路構造認識部11及び物体検出部13と、物体の近傍を通過する際の上限通過速度を算出する上限通過速度算出部14と、上限通過速度に基づいて自車両Mの速度制御軌道SRを生成する速度制御軌道生成部17と、速度制御軌道SRに基づいて自車両Mの運転支援を実行する運転支援部18と、を備え、速度制御軌道生成部17は、複数の物体が検出された場合、自車両Mの進行方向Pにおける物体の密度ρに基づいて速度制御軌道SRを生成することを特徴とする。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
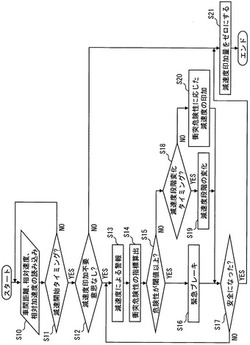
衝突回避装置
【課題】本発明は、運転者が意図しない進路変更において、対象物を回避し、当該対象物との衝突を未然に防止することのできる衝突回避装置を提供する。
【解決手段】ドライバによりステアリングが操作され(S10)、ドライバによりウインカーレバーが操作されないと(S12)、自車両の進路予測を行い(S14)、自車両の走行している走行レーンが認識不可能な場合(S16)、或いは自車両の走行している走行レーンが認識可能であってもドライバのステアリング操作により走行レーンを逸脱する虞がない場合(S24)に自車両の進路上に衝突対象物があれば(S18)、スピーカより警報を発声し(S20)、更に衝突対象との衝突を回避するように操舵アシスト及びブレーキ操作アシストを作動する(S22)。
(もっと読む)
車両制御装置
【課題】低コストで構成可能でありながら適切なタイミングで衝突安全装置を動作可能とする車両制御装置を提供する。
【解決手段】自車両と物体との衝突の危険性を低減するべく車両を制御する車両制御装置であって、物体を検出する物体検出手段と、物体と自車両との衝突の危険性が高いか否か判定する衝突判定手段と、衝突判定手段により衝突の危険性が高いと判定された場合、衝突の危険性を低減するための衝突安全装置を作動させる衝突安全装置制御手段と、自車両の車体のピッチ角の経時変化量をピッチ角変化量として算出するピッチ角変化量算出手段と、ピッチ角変化量に基づいて衝突安全装置の動作を抑制または停止する動作抑制手段とを備える、車両制御装置である。
(もっと読む)
運転支援装置及び運転支援方法
【課題】ドライバーにとって違和感のない運転支援を実行可能な運転支援装置及び運転支援方法を提供する。
【解決手段】自車両V0周囲の状況に応じて支援量決定部14が決定した運転支援量により自車両V0のドライバーの運転支援を行い、運転支援量を決定した後にドライバーによる操舵があったときは、支援量変化量算定部17及び支援実現部18は、運転支援量を決定した後のドライバーによる操舵量に応じた補正量により補正された運転支援量によりドライバーの運転支援を行う。このため、ドライバーにとって違和感のない運転支援が実行される。
(もっと読む)
1 - 20 / 301
[ Back to top ]