
Fターム[3D246HC00]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525)
Fターム[3D246HC00]の下位に属するFターム
Fターム[3D246HC00]に分類される特許
1 - 9 / 9
車両の乗客監視装置
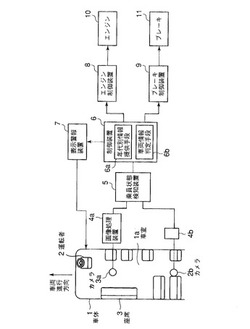
【課題】車室内における座席に着座していない乗員の状態を識別し、乗客の年齢等の識別信号によって、座席に着座していない乗員の年代に対応した状態を検知し、かかる識別信号に対応した運転制御ができる車両の乗客監視装置を提供する。
【解決手段】車両の車室内における乗員の動きを検知して、車両内の乗員の状況を監視する車両の乗客監視装置において、前記車室内における乗員の状況を検知する乗員状態検知装置と、該乗員状態検知装置からの乗員状況検知信号を受信して該乗員状況検知信号から座席に着座していない乗員を識別すると、該乗員識別信号を表示警報装置を介して運転者に検知させるとともに、前記車内の不安定状態を識別するとエンジン制御装置及びブレーキ制御装置をそれぞれ制御して前記車両の走行状態を加減する制御装置とを備える。
(もっと読む)
レールと車輪間の粘着係数測定値の評価方法

【課題】粘着係数測定値とその時の速度を用いて測定対象車両の滑走確率を計算することにより、車両の加速力または制動力の定量的な設定を可能にすることができるレールと車輪間の粘着係数測定値の評価方法を提供する。
【解決手段】レールと車輪間の粘着係数測定値の評価方法において、粘着係数測定値とその時の速度から比粘着係数を算出し、この算出した比粘着係数を値の小さいものから大きなものへと順に並べ、最も小さいものを1として番号付けを行い、この付与した番号の全てを、粘着係数測定試験時にブレーキ力を繰り返し与えた総回数で除することにより、前記比粘着係数に対する滑走確率を得るようにした。
(もっと読む)
車両の車体速度演算装置、及び車両の車体速度演算方法
【課題】車両の進行方向前側に配置された前輪に対して制動力が付与される場合に演算される車両の推定車体速度の正確性の向上に貢献できる車両の車体速度演算装置、及び車両の車体速度演算方法を提供する。
【解決手段】ECUは、前輪にのみ制動力が付与される状態で、リアリフト状態であると判定された場合には、リアリフト状態であると判定される直前の車体減速度よりも大きな値の演算用減速度DVSEを読み出す(ステップS81)。そして、ECUは、前回に演算した推定車体速度VSから演算用減速度DVSEを演算し、該演算結果を今回の推定車体速度VSに設定する(ステップS82)。一方、リアリフト状態であると判定されていない場合、ECUは、各車輪のうち少なくとも一方の車輪の車輪速度に基づき推定車体速度VSを演算する。
(もっと読む)
走行軌跡生成装置及び走行軌跡生成方法
【課題】路面に応じて安全性と実用性とを両立させた走行軌跡を生成することができる走行軌跡生成装置及び走行軌跡生成方法を提供する。
【解決手段】
走行軌跡生成装置は、車両5が走行する通過予定経路Dにおいて、路面D1が滑りやすいと判定された特定区間E2を取得する路面状況取得部20と、特定区間E2では車両モデルを慣性運動とすると共にタイヤ発生力が摩擦円限界を超えないことを含まない第1拘束条件を達成するように収束演算して走行軌跡を生成する走行軌跡導出部21とを備えることにより、車両5のスピンを特定区間E2手前での減速制御のみで回避するのではなく、特定区間E2においては、ある程度のスリップ状態を許容しているので、必要以上の減速を伴わず、実用性が確保された走行軌跡を生成することができる。
(もっと読む)
状態推定システム
【課題】観測データに含まれるノイズや不要なデータを除去して的確な入力情報のみをニューラルネットワークに適応可能とし、教師データへのマッチング精度や計算速度を向上させる。
【解決手段】状態推定システム1は、NNS2への前処理部として、観測データを独立成分分析するICA部5と主成分分析するPCA部6とを備え、ICA部5、PCA部6、NNS2への入力パターンを適応的に決定するGA部7を備えている。ICA部5は観測データから電気的・機械的なノイズ成分を除去した原信号を推定してNNS2へ入力し、PCA部6はICA部5では把握しきれない非線形な部分での不要なデータを除去し、誤差を低減した代表的な特性データをNNS2へ入力する。これにより、NNS2への入力情報を的確な情報とすることができ、NNS2における教師データへのマッチング精度や計算速度を向上させることができる。
(もっと読む)
車両挙動状態推定装置
【課題】誤検出することなく車両挙動が不安定予兆状態又は不安定状態に陥ったことを確実に推定することができ、また、多くのセンサ類を必要としない車両挙動状態推定装置を得る。
【解決手段】走行中の車両のタイヤが路面から受ける路面反力トルクを検出する路面反力トルク検出器105と、前記車両の操舵角速度を検出する操舵角速度検出器103と、前記車両の車速を検出する車速検出器101と、路面反力トルク検出器105により検出された路面反力トルクに基づき路面反力トルク変化率を演算し、車速検出器101により検出された車速、及び操舵角速度検出器103により検出された操舵角速度に基づき規範路面反力トルク変化率を演算し、前記路面反力トルク変化率、及び前記規範路面反力トルク変化率に基づいて、前記車両の挙動が不安定予兆状態であることを検出するとともに、不安定状態であることを検出する車両挙動状態推定手段200とを設けた。
(もっと読む)
停車検知装置およびこれを用いた変速機中立制御装置およびエンジンアイドルストップ制御装置
【課題】車速検出値だけでは、センサの構成上、停車を正確に判定し得ない問題を、ブレーキ制動力と、クリープ駆動力との対比判断の付加により解消する。
【解決手段】S1で、発進変速段選択状態の自動変速機を中立状態にすべき変速機中立制御許可条件のうち、停車以外の条件(Dレンジ、ブレーキ液圧Pb>0の制動状態、アクセル開度APO=0、車速検出値VSP=停車判定用設定値未満)が成立していると判定し、S2で、ブレーキ制動力Tbが勾配後退力Tsを超えている(登坂路において後退しない)と判定し、S3で、ブレーキ制動力Tbがクリープ駆動力Tc以上(停車可能)と判定する時、停車と判定して、S4で変速機中立制御を実行する。S5でTb≦TsまたはTb≦所定値<Tcになったと判定する時、S6において、上記の変速機中立制御を解除する。
(もっと読む)
車両運転補助方法および改良型関連装置
本発明は、対象物感知検出器を備え、以下のステップを含む車両運転補助方法に関する。これらステップは、検出対象物の運動学的パラメータのフィールドのN個のセルへの分割化に対応する占有グリッドを定義するステップと、各時間kで検出器によって生成された観測値zkを取得し、その挙動をモデル化する検出器確率を決定するステップと、先行する時間でのグリッドの推定占有密度を認識し、セルXが時間kで占有状態である確率をもたらす予測占有確率を各セルXに対して計算するステップと、検出器確率および予測占有確率を用意して推定占有確率を各セルXに対して計算するステップであって、時間kで予測占有確率がグリッドの単一のセルが時間k−1で関与するセルXに先行するセルを構成すると仮定して決定されるステップと、各セルXに対して時間kでの推定確率に基づいて衝突確率を評価するステップと、対象物を回避するために信号を発信するステップとを含む。 (もっと読む)
自動車の走行機能を制御するための方法
本発明は、所定の走行状態を示すセンサ信号を利用してそこから走行指示あるいはそれに類する物を生成するという制御装置を用いて、自動車の走行機能を制御するための方法、に関する。この走行指示は、車両の運転者に向けられてもよいし、制御指令として関連するユニットに直接送られてもよい。道路に勾配があって車両に傾斜が生じると、運転に有意な影響が生じる。本発明では、水平に対する車両の傾きが少なくとも1つの傾斜センサを用いて検知され、当該傾斜センサの信号が前記制御装置に入力され、傾斜が関わる走行状況における走行指示あるいはそれに類する物を生成するために使用される。縦方向の傾斜と横方向の傾斜との二つが検知されて評価されることが好ましい。 (もっと読む)
1 - 9 / 9
[ Back to top ]