
Fターム[3D246HC11]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | 別の方法で求めた同じ物理量を使うもの (44)
Fターム[3D246HC11]の下位に属するFターム
それぞれの得意なところを足すもの
2つの値の誤差を推定に用いるもの (19)
Fターム[3D246HC11]に分類される特許
1 - 20 / 25
車両のエンジン自動停止制御装置
【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
車両の駆動輪に働く駆動力を制限する駆動力制限装置

【課題】推定速度の精度を向上可能な駆動力制限装置を提供すること。
【解決手段】車両の駆動輪に働く駆動力を制限する駆動力制限装置は、前記車両の第1の加速度を補正して、補正された前記第1の加速度を第2の加速度として得る加速度補正部と、前記駆動輪の車輪速度及び前記第1の加速度に基づき前記車両の第1の速度を算出する第1の算出部と、前記車輪速度及び前記第2の加速度に基づき前記車両の第2の速度を算出する第2の算出部と、前記第1の速度と前記第2の速度との差が第1の閾値以上である場合、前記駆動力を制限する制限駆動力を要求する要求部と、前記第2の速度を前記車両の推定速度として用いる推定部と、を備える。前記要求部が前記制限駆動力を要求することによって、前記車輪速度が第2の閾値を下回る時、前記推定部は、前記第2の速度を前記第1の速度でリセットして前記推定速度を得る。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車両が横転しそうなときの姿勢の安定性をより向上させる。
【解決手段】同一軸上に設けられた左右の車輪を個別に制動可能に構成され、旋回中に横転傾向が検知されると車輪を制動して横転抑制制御を実行する車両用ブレーキ液圧制御装置であって、横転抑制制御部120は、横転傾向が検知された場合に、旋回外輪に第1の制動力で制動を行うと同時に、同一軸上の旋回内輪に第1の制動力よりも小さい第2の制動力で制動を開始する。
(もっと読む)
車両状態量推定装置
【課題】車両の挙動制御時における挙動の急変を抑制することのできる車両状態量推定装置を提供すること。
【解決手段】車両1の挙動制御に用いる目標横加速度Gytを車両1の走行時における横加速度実測値Gysと横加速度推定値Gyeとに基づいて推定する車両状態量推定装置2において、横加速度実測値Gysと横加速度推定値Gyeとに基づいて目標横加速度Gytを推定する場合には、車両1の横滑りの状態に応じて横加速度実測値Gysと横加速度推定値Gyeとに重み付けを行うことにより推定すると共に、横滑りが所定値以上になった場合には横滑りの状態に関わらず横加速度実測値Gysの重み付けが大きい状態を維持し、横加速度実測値Gysと横加速度推定値Gyeとの差が所定値以下の状態が所定時間継続した場合に、横加速度実測値Gysの重み付けが大きい状態を解除する。
(もっと読む)
車両用制動装置
【課題】マスタシリンダ圧力を検出する圧力センサの零点補正値を適切に更新することができる車両用制動装置を提供する。
【解決手段】マスタシリンダ23により調整された液圧の圧力に対応する出力値を検出する油圧センサ40と、マスタシリンダ23の圧力が0となる油圧センサ40の出力値を零点補正値として記憶し、該零点補正値に基づいて油圧センサ40の出力値を補正してマスタシリンダ圧力を算出するマスタシリンダ圧力算出部52と、を備える車両用制動装置20において、油圧センサ40により検出された出力値が、マスタシリンダ圧力算出部52に記憶されている零点補正値より小さい場合に、該出力値を新たな零点補正値として設定し、零点補正値を更新する零点補正値更新部54を備える。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
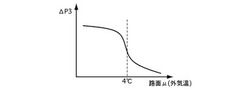
液圧ブレーキシステム
【課題】ブレーキシステムの自己診断機能において、作動液の温度が低下している状況下における誤検出を防止する。
【解決手段】走行中において、動力式液圧源装置によって発生させられる液圧が閾液圧PBより低い状態が閾継続時間TB以上続いた場合に、ブレーキシリンダへの作動液の供給を、動力式液圧源装置からマスタシリンダ装置に切り換えるように構成されたブレーキシステムを、作動液の温度が設定温度より低下していると推定される場合に、閾液圧を低い値PB'することと、閾継続時間を長い値TB'とすることとの少なくとも一方を行うように構成する。作動液の温度が設定温度より低下している状況下において、誤って動力式液圧源装置の異常と診断されることを回避することが可能である。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
車両用情報処理装置および車両制御装置
【課題】車輪の滑りによる車両の挙動を精度よく判定することができる車両用情報処理装置および車両制御装置を提供すること。
【解決手段】車両100のヨーレートを検出するヨーレート検出部38によって検出されたヨーレートの向きに基づいて、車両の車輪の滑りによる車両の挙動を判定する車両用情報処理装置1、および車両用情報処理装置を備える車両制御装置1−1。車両用情報処理装置は、例えば、ヨーレートの向きが所定時間変化しない場合に上記挙動が生じていると判定する。
(もっと読む)
車両制御装置
【課題】車速制御中にドライバがブレーキ操作を行ったときに受ける違和感を防止する車両制御装置を提供することを課題とする。
【解決手段】自車両の車速を制御する車両制御装置であって、自車両のドライバのブレーキ操作を検出するブレーキ操作検出手段と、車速制御中に自車両のドライバがブレーキ操作を行ったときに当該ブレーキ操作における踏力が閾値以下の場合に車速制御の解除を禁止し、通常の車速制御とは異なるブレーキ操作時の車速制御に切り替え、自車両のドライバがブレーキ操作を終了した場合にブレーキ操作時の車速制御から通常の車速制御に切り替える制御切替手段を備えることを特徴とする。
(もっと読む)
車輪速センサの異常検出方法及び車両のスリップ制御方法
【課題】センサ取付位置による誤差や外来ノイズ等の影響を受けず、車輪速センサの異常を検出すること。
【解決手段】左右の駆動輪の車輪速センサによる平均回転速度を検出し、変速機内の回転センサによる車輪速換算値を検出し、平均回転速度と車輪速換算値との差を逐次時間積分して相対角を求める。車輪速センサと回転センサとの各取付部での相対角の許容値を設定し、時間積分で得られた相対角がこの許容値を越えた場合に車輪速センサの異常と判定する。
(もっと読む)
車両用制御装置
【課題】GPS受信装置が無くても大気圧センサの異常検出を行うことができるようにする。
【解決手段】前後加速度センサの検出信号に基づいて検出される勾配角度θや車輪速度センサの検出信号に基づいて演算される推定車体加速度dVに基づいて高度変化量を算出し、高度変化量から気圧変化量を推定する。そして、気圧変化量のセンサ値と推定値とを比較することにより、大気圧センサの異常を検出する。これにより、GPS受信装置が無くても大気圧センサの異常検出を行うことが可能となる。
(もっと読む)
ハイブリッド車両
【課題】故障発生時に速やかに退避走行をさせることができるハイブリッド車両を提供する。
【解決手段】ハイブリッド車両20は、車輪と、車輪を固定するロック機構36と、モータMG2と、エンジン22と、モータMG2およびエンジン22からのトルクを車輪の駆動軸に伝達する動力分割機構30と、モータMG2およびエンジン22を制御するとともに動力分割機構30の分配比を可変に制御する制御ユニット70とを備える。制御ユニット70は、ロック機構36が非作動状態においてモータMG2に異常が発生した場合であって、車速が所定値より大きいときには、モータMG2を非駆動状態としエンジン22からのトルクを車輪に伝達するように動力分割機構30を制御する。
(もっと読む)
道路車両において自発的な非常制動を正確に実行する方法
道路車両(1)において事故の厳しさを減少するため自発的な非常制動を正確に実行する方法が提案され、自発的な非常制動中に車両(1)の速度が求められる。この方法によれば、車両の車輪回転数とは無関係な付加的な速度検出が行われる。これにより、自発的な強い制動のため車両速度が車輪回転数により高い場合においても、車両速度を十分正確に求めることができる。 (もっと読む)
車両の走行制御装置
【課題】 現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供する。
【解決手段】 緊急地震速報を受信し、地震対応制御を行う場合において、アクセルペダル操作量APが増加するときは、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APが補正され、補正アクセルペダル操作量APCが算出される。補正アクセルペダル操作量APCに応じてエンジンのスロットル弁開度を制御するスロットルアクチュエータ31の駆動制御が行われる。ブレーキペダル操作量BP及びステアリングホイールの操舵角STについても、ほぼ同様の処理により補正ブレーキペダル操作量BPC及び補正操舵角STCが算出される。
(もっと読む)
車両用ブレーキのトルク補正が可能な制御方法
【課題】車両用のブレーキの制御方法を提供する。
【解決手段】ブレーキの制御方法が、ブレーキの設定値(F)に基づいて、ブレーキアクチュエータの通常の作動設定値(X)を、前記ブレーキの設定値のすべての成分を考りょして決定する段階と、前記ブレーキの設定値(F)と前記ブレーキにより作用された測定されたトルク(Cmes)とに基づいて、前記通常の作動設定値の補正値(Xcorr)を決定する段階であって、前記補正値は前記ブレーキの設定値の低周波数の変動だけを考りょしている段階と、前記補正値を通常の作動設定値に加える段階と、を含んでいる。
(もっと読む)
ブレーキ制御装置
【課題】制御系に対する外乱や外界の状態変化などに拘らずに、目標ブレーキトルクを適切に設定すると共に制動力が不必要に低下してしまうことを防止する。
【解決手段】ブレーキ制御装置10は、車体減速度演算部52による車体の推定減速度GRDVの前回の演算時に車輪速センサ45により検出された車輪速と今回の演算時に車輪速センサ45により検出された車輪速とにより車輪減速度GReを算出する車輪減速度演算部53aと、推定車体減速度GRvを算出する推定車体減速度演算部53bとを備え、車体減速度演算部52は、車輪減速度GReと推定車体減速度GRvとの比に応じた補正係数KDによる補正をおこなって車体の推定減速度GRDVを演算しており、補正係数KDは、推定車体減速度GRvよりも車輪減速度GReのほうが大きい場合に、補正前に比べて補正後に推定減速度GRDVが大きくなるように補正する。
(もっと読む)
走行制御装置
【課題】
従来技術によれば、カーブの実状況を反映していないため、車速制御を行うための情報が不足し、適切な速度制御が実現できない、という課題がある。
【解決手段】
本走行制御装置は、走行車線を認識する認識部と、自車前方に存在するカーブの情報を取得する取得部と、当該情報に基づいてカーブにおける自車の目標速度を算出する算出部と、目標速度に基づいて自車を制御する制御部を備え、認識部は走行車線の幅を認識し、算出部は幅に基づいて目標速度を変更する。算出部は、幅に対応する基準値を設定し、基準値より小さい幅では目標速度を小さく変更し、基準値より大きい幅では目標速度を大きく変更してもよい。又、制御部は、幅が基準値より小さい時は、目標速度による車両制御を中止してもよい。
(もっと読む)
車両における少なくとも1つのホイールのロケーティングのための方法、センサ、検出器及びシステム
本発明は車両(1)における少なくとも1つのホイール(2a〜2d)のロケーティングのための方法に関する。ここでは、
a)ホイール(2a〜2d)に取付けられている第1のセンサ(4a〜4d)からのホイール(2a〜2d)位置(P1〜P6)を示す信号(S4a〜S4d)を受信するステップと、
b)ホイール(2a〜2d)の角度位置を測定しさらに車両(1)の特定の位置に対応付ける第2のセンサ(5a〜5d)の測定値(S5a〜S5d)を受信するステップと、
c)前記測定値(S5a〜S5d)に関する第1の信号(S4a〜S4d)の位相位置(W1a〜W3a,W1b〜W1b)を確定するステップと、
d)前記位相位置(W1a〜W3a,W1b〜W1b)が所定の監視期間において所定の許容範囲(WTa,WTb)内に留まっている場合に、第2のセンサ(5a〜5d)に第1のセンサ(4a〜4d)を割当てるステップが含まれる。 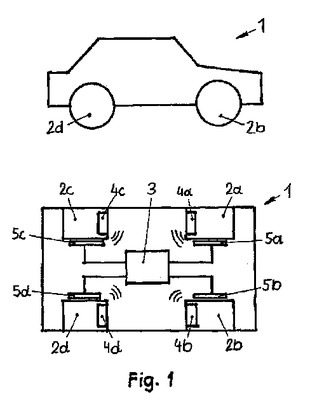 (もっと読む)
(もっと読む)
車両運動制御装置
【課題】
本発明の目的は、ブレーキ液圧に対するブレーキ液圧推定値の遅れを容易に補正可能な車両運動制御装置を提供することである。
【解決手段】
車両挙動に基づいてブレーキ液圧制御指令値を演算するコントローラと、前記ブレーキ液圧制御指令値に基づいてブレーキ液圧制御を行う油圧ユニットを備えた車両運動制御装置において、前記コントローラは、前記ブレーキ液圧制御を行った時の前記車両挙動に基づいて、次に前記ブレーキ液圧制御を行う時の前記ブレーキ液圧制御指令値を補正する。
(もっと読む)
1 - 20 / 25
[ Back to top ]