
Fターム[3D246JA11]の内容
ブレーキシステム(制動力調整) (55,256) | 目標制御量 (1,430) | 車輪に関するもの (718)
Fターム[3D246JA11]の下位に属するFターム
ホイールシリンダ圧、制動力、制動トルク (546)
車輪速度 (38)
車輪加減速度 (18)
スリップ率、スリップ量 (98)
車輪スリップ角 (9)
Fターム[3D246JA11]に分類される特許
1 - 9 / 9
電動車両の制御装置
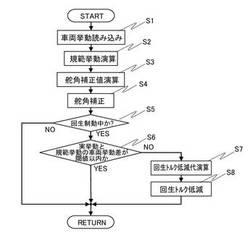
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
車両の制御装置

【課題】車輪相互間の差回転を適切に制御すると共に、車輪と路面の間のグリップ力を適切に監視してタイヤのグリップ力を最適に維持しながら摩擦円を使い切る効率の良い最適な制御を行う。
【解決手段】ドライバ要求に基づき車輪に発生するタイヤ力と車輪に現在発生しているタイヤ力を基にタイヤ力の摩擦円からのオーバー量をオーバータイヤ力Foverとして演算し、このオーバータイヤ力Foverが+の場合、このオーバータイヤ力Fover分のトルクToverを減じるようにエンジン制御部39に信号出力する。また、オーバータイヤ力Foverと、車体速と各車輪速との差回転を演算し、オーバータイヤ力Foverとこの差回転に基づいてブレーキ駆動部25に信号出力して各輪を制動制御する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】運転者の意図を尊重しつつ、確実に目標車速まで減速する技術を提供する。
【解決手段】自車両の前方の所定位置における目標車速を取得し、前記目標車速まで減速させる際の、減速度が異なる複数の減速動作パターンを取得し、前記自車両の車速を制御するための運転操作に基づいて、前記複数の減速動作パターンの中から減速動作パターンを選択し、前記選択された減速動作パターンを基準にして前記所定位置に到達する以前に前記自車両の車速を前記目標車速まで減速させる。
(もっと読む)
車両運動制御システム
【課題】駆動力配分制御と制動力配分制御との併用により車両運動制御を効率的に行い得る車両運動制御システムを提供すること。
【解決手段】車両運動制御システム1では、車両運動制御にあたり、車両10の運動に関する状態量と、車両の運動に関する各車輪11FR〜11RLの制御量と、車両の運動を安定化させるための目標状態量と、目標状態量を実現するための目標制御量と、目標制御量を実現するための各車輪の制駆動力の目標制駆動力とが算出される。また、目標制駆動力に基づいて駆動力配分制御装置2による駆動輪11RR、11RLの駆動力制御と、制動力制御装置3による各車輪11FR〜11RLの制動力制御とが行われる。状態量が車両10の前輪横力および後輪横力を含む。このとき、駆動輪11RR、11RLに作用する横力が他の車輪11FR、11FLに作用する横力よりも小さくなるよう、制動力制御装置3が各車輪の制動力を制御する。
(もっと読む)
車両用制御装置
【課題】駆動力または制動力の配分によって車両の走行安定性を高める車両用制御装置において、走行安定性を高める制御が阻害されないようにする。
【解決手段】マイコン10に含まれる目標前輪横力設定部12は、舵角θと車速Vと前輪荷重Ffzとに基づき目標前輪横力Fftを決定し、これに車両の実前輪横力Ffyが一致するようFB制御演算部16は指令値Dcを算出し配分装置駆動回路20に与える。これにより生じる後輪前後力Frxは後輪前後力センサ6により検出され、抑制量演算部38はこの値に基づき抑制量Asを算出し、減算器34は目標転舵角Atからこれを差し引く。転舵比演算部36はこれを転舵比に変換して転舵比可変装置駆動回路40に与える。このことにより車両の転舵が抑制されるので、上記配分により前輪が横滑りしやすくなることがなく、走行安定性を高める制御などが阻害されない。
(もっと読む)
車両制御装置
【課題】車体モデルと、シャーシモデルと、タイヤモデルとに分離・階層化された車両モデルを用いながら、タイヤの振動状態を精度良く推測する。
【解決手段】
車両モデルにおけるタイヤモデル20は、後輪タイヤモデル21と、前輪タイヤモデル22と、これらの後輪タイヤモデル21と前輪タイヤモデル22とを仮想的に連結する仮想連結要素モデル23とからなる。これにより、タイヤモデル20とシャーシモデル24とを分離しながら、前輪タイヤと後輪タイヤとの間で作用する振動状態の影響を考慮することができるようになり、前輪タイヤ及び後輪タイヤに生じる振動を精度良く推測することが可能になる。
(もっと読む)
車両の運動制御装置
【課題】車両が急激に不安定になってしまう事態を防止あるいは抑制する。
【解決手段】コントローラUによって、目標横力、目標前後力、目標ヨーモーメントとなるように、前後左右の各タイヤ1FL〜1RRへの横力fxiおよび前後力fyiが変更制御される(i=1〜4で各タイヤの識別子)。タイヤ力検出センサ20で検出されたタイヤ力と、各タイヤで得られる最大タイヤ力fmaxiとに基づいて、各タイヤの負荷率ηiが決定される。前後左右のタイヤを対角線上に位置する2つのタイヤ同士で対をなす2組のタイヤ対に分けて(1FLと1RR、1FRと1RL)、対となるタイヤの負荷率(η1とη4、η2とη3)が互いに均等となるように各タイヤのタイヤ力が変更制御される。
(もっと読む)
車両の運動制御装置
【課題】車両が急激に不安定になってしまう事態を防止あるいは抑制する。
【解決手段】目標横力、目標前後力、目標ヨーモーメントとなるように、前後左右の各タイヤ1FL〜1RRへの横力fxiおよび前後力fyiが個々独立して変更制御される(i=各タイヤを区別する識別子)。タイヤ力検出センサ20で検出されたタイヤ力に基づいて、各タイヤの負荷率ηiが決定される。負荷率ηiが所定値以上となる飽和タイヤが存在することが検出されたとき、飽和タイヤにおける横力不足分が、飽和タイヤに対して左右反対側にある他のタイヤに加算される。
(もっと読む)
協調型トラクション制御システム
個々の車輪の空転及び/又は横滑りを個別に制御する協調型トラクション制御システムである。該システムは、特定の車軸に備えられた所定の車輪に掛かる駆動トルクの量を調節できる駆動トルクアクチュエータに接続されている既存のトラクション及び挙動安定化モジュールを使用している。このシステムは、空転及び/又は横滑りしている車輪の駆動トルクの制御を行うか、或いは、ブレーキを作動させてスロットル角度を調節するとともに該駆動トルクの制御を行って、車輪の空転及び/又は横滑り及び/又は車両の動作を低減又は制御する。 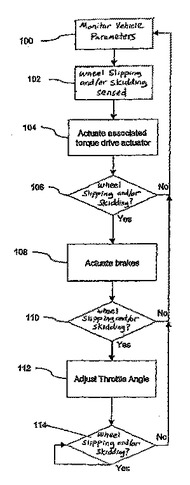 (もっと読む)
(もっと読む)
1 - 9 / 9
[ Back to top ]