
Fターム[3D246JB10]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 上限値、下限値の設定 (139)
Fターム[3D246JB10]に分類される特許
1 - 20 / 139
ブレーキシステム
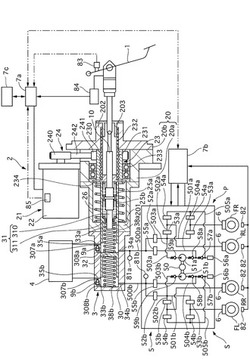
【課題】
大型化を抑制しつつ、フェード時にホイールシリンダを増圧することができるブレーキシステムを提供すること。
【解決手段】
ブレーキ操作に応じてリザーバ4から遮断されて液圧室33にて液圧を発生するマスタシリンダ3と、リザーバ4から液圧室33へのブレーキ液の流れを許容する逆止弁9とを有し、フェード状態にあると判定したとき、液圧室33とホイールシリンダ6との間に設けられた液圧ユニット5が、逆止弁9を介してリザーバ4のブレーキ液を吸引し、ホイールシリンダ6へ供給することとした。
(もっと読む)
車両の制御装置

【課題】エンジンのアイドリングストップを行う車両の坂路発進性をより好適に確保することのできる車両の制御装置を提供する。
【解決手段】エンジンのアイドリングストップに応じて行われるヒルホールド制御を、アイドリングストップからの復帰のためのエンジンの再始動指令がなされ(S101:YES)、かつエンジン回転速度が既定の判定値α以上である(S102:YES)ことを条件に解除する(S104)一方で、そうした条件が成立しても、エンジンがアイドリングストップによる停止の途上にあるときには(S103:YES)、ヒルホールド制御を解除しないようにした。
(もっと読む)
非常用制動システム
【課題】アクセルペダルとブレーキペダルを踏み間違えたときに瞬時に車両の挙動を安全側に制御する非常用制動システムを提供する。
【解決手段】この非常用制動システムは、ブレーキペダル26と間違えてアクセルペダル20を踏むなどして車両10が暴走してしまうような状況に陥ったときに、空いている左足で操作できるようにされた非常用ブレーキペダル30を踏み込むことにより、車輪ブレーキ22を作動させるとともにオートマティックトランスミッション14をニュートラルに切り換え、エンジン12から車輪への駆動力を遮断するように構成されている。
(もっと読む)
車両用ブレーキ装置の制御装置
【課題】倍力制動装置を小型化しつつ、倍力制動装置で発生できる制動力以上の制動力を得られるようにする。
【解決手段】ブレーキ操作量が増大する要求制動力の増大時に、要求制動力が、ポンプで制動用液圧を発生する車輪別制動手段によるポンプアップ許可制動力を超えたときに、該ポンプの駆動を開始し、要求制動力が倍力制動装置で発生される制動用液圧(マスタ圧)の上限値付近に設定された設定値に達したときに、マスタ圧を前記ポンプで昇圧した制動液圧をホイールシリンダに供給するポンプアップ制御を行う(S3,S4,S6,S7,S8)。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
車両の制御方法及び制御装置
【課題】回生制動装置10と油圧式制動装置30とを備えた車両において、回生制動が付与されている車輪21にスリップが発生したときに、G抜け感の発生を抑制しつつ、上記車輪21のスリップを出来る限り早期に解消する。
【解決手段】回生制動が付与されている少なくとも1つの車輪21のスリップ率が第1所定値以上になったときに、回生制動が付与されている全車輪21に対する回生制動装置10による回生制動力を第1速度で減少させかつ油圧式制動装置30による油圧制動力を増加させ、該油圧制動力の増加後に、スリップ率が上記第1所定値以上になった車輪21に対して、油圧式制動装置30によるアンチロックブレーキ動作を実行させ、回生制動装置30による回生制動力を第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更する。
(もっと読む)
車両の運動制御装置
【課題】簡単な構成でハンドル角が小さな低横加速度旋回領域とハンドル角が大きな高横加速度旋回領域を含む全横加速度旋回領域において車両の運動状態を的確に制御して操縦安定性を高めることができる車両の運動制御装置を提供すること。
【解決手段】車速とハンドル角に基づいて目標ヨー角速度を算出し、算出された目標ヨー角速度と実際のヨー角速度との偏差が実質的に0になるよう車両の運動を制御するECU(制御手段)と、を備える車両の運動制御装置において、前記ECUは、ハンドル角が所定の閾値よりも小さい低横加速度旋回領域においてはハンドル角に比例する目標ヨー角速度を使用し、ハンドル角が前記閾値よりも大きい高横加速度旋回領域においてはハンドル角に依存しない最大横加速度で車両が定常円旋回するときのヨー角速度を目標ヨー角速度として使用して車両の運動を制御する。
(もっと読む)
車両のブレーキ制御装置
【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧アクチュエータと、統合コントローラとを備え、統合コントローラは、停車時モータオフ制御部と、昇圧勾配制限部とを有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータを停止し、車両停止中、VDCモータの停止状態を維持したままとする。昇圧勾配制限部は、車両停止状態からの車速発生により停車時モータオフ制御を終了するとき、ドライバのブレーキペダルリリース前の目標減速度と、そのときのホイールシリンダ圧による実減速度と、の差異が大きくなるほど、VDCモータの作動再開に伴うホイールシリンダ圧の上昇勾配を小さくする。
(もっと読む)
車両制御装置
【課題】 ペダル吸い込まれ感をより低減できる車両制御装置を提供する。
【解決手段】 ブレーキペダルBPのストローク量を検出するストロークセンサ42と、ストローク量がSTrmax未満の場合、最大回生制動力Frmaxと等しい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第1回生制動力算出部32aと、ストローク量がSTrmax以上の場合、最大回生制動力Frmaxより小さい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第2回生制動力算出部32bと、要求回生制動力Frreqに基づいて実際に発生された回生制動力の検出値である実行回生制動力Frと液圧制動力との和が車両に必要な制動力である要求総制動力Freqとなるように、要求総制動力Freqと実行回生制動力Frとの差分を要求液圧制動力Fwcreqとして算出する制動制御部32cと、を有するBCU32を備えた。
(もっと読む)
電磁ブレーキ付作業車両
【課題】電磁ブレーキ付作業車両において、左右の電磁ブレーキのうち、一方の電磁ブレーキの異常発生時でも、運転者の意図しない旋回を有効に防止することである。
【解決手段】電磁ブレーキ付作業車両である芝刈車両10は、左右の電磁ブレーキ32,36と、共通ブレーキ解除手段であるブレーキリレーと、ECUとを含む。ECUは、左右の電磁ブレーキの通電状態を比較し、比較部で比較した通電状態の差が許容上限を超える場合に、バッテリと左右の電磁ブレーキ32,36との電気的接続を遮断して左右車輪18,20を制動させるようにブレーキリレーを制御する。
(もっと読む)
車両制御装置
【課題】大型化を回避しつつ音振性能を確保し、安価でありながら適切な回生協調制御を達成可能な車両制御装置を提供すること。
【解決手段】モータを駆動源とする車両において、制動時にモータによる回生制動力と油圧による摩擦制動力とを協調させる回生協調制動力の制御において、回生協調制御により回生制動力から摩擦制動力にすり替えるときは、設定したすり替え速度範囲において、ギヤポンプの能力や音振性能への影響を及ぼさない範囲で、各制動力の変化勾配を最大変化勾配より小さな所定勾配以下に制限することで所望の制動力を得るととした。
(もっと読む)
車両の協調ブレーキ制御装置
【課題】コストアップや重量増加を招くことなく、運転者が要求する大きさの制動力を確保しつつブレーキ鳴きの発生を確実に防ぐことができる車両の協調ブレーキ制御装置を提供すること。
【解決手段】液圧制動力を発生する液圧ブレーキ5と回生制動力を発生する回生ブレーキ4を協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置18において、前記液圧ブレーキ5の最低液圧を設定し、前記液圧ブレーキ5を使用する場合には該液圧ブレーキ5を前記最低液圧以上の液圧で作動させる。具体的には、回生ブレーキ4の最高回生制動力を設定し、運転者が要求する制動力に対する最高回生制動力の不足分を液圧制動力で補い、該液圧制動力を発生させる液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ回生制動力を減少させる。
(もっと読む)
アイドリングストップシステムおよびアイドリングストップの方法
【課題】車両のアイドリングストップからのエンジンの再始動時にヒルスタートアシストを低コストで円滑に行えるアイドリングストップシステムおよびアイドリングストップの方法を提供する。
【解決手段】アイドリングストップシステムは、車両の走行停止状態において原動機4を停止および再始動するアイドリングストップシステムであって、ブレーキペダルの操作によって発生した制動力を少なくとも一時的に保持する制動力保持制御を実行する制動制御装置6と、ブレーキペダルの操作中において、所定の再始動条件が成立した際に停止中の原動機4を再始動する原動機制御装置4Eと、原動機4の再始動に先立って制動制御装置6の作動条件を一時的に緩和する作動条件緩和手段6とを備える。
(もっと読む)
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置
【課題】磁気式回転角検出装置に外乱磁界が作用して回転角検出誤差を生じる状態を的確に判定すること。
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
(もっと読む)
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
車両挙動制御装置
【課題】ブレーキによるヨーモーメント制御のハンチングの発生を抑制し、滑らかな車両挙動で、制御精度を向上する。
【解決手段】車両の運転状態に基づいて車両の目標ヨーレートγtを算出し、車体すべり角速度に基づいて車体すべり角速度感応ゲインGdβを設定し、ヨーレート、γt、Gdβに基づいて目標ヨーモーメントMztを算出し、旋回内側前後輪に付加する目標ブレーキ液圧算出する。ここで、車体すべり角速度感応ゲインGdβは、目標ヨーモーメントMztの値が、タイヤのグリップ限界を超えるヨーレートを発生させる値とならないように、車体すべり角速度の絶対値に応じて目標ヨーモーメントMztを減少補正する補正ゲインとなっているが、この減少補正の際、目標ヨーモーメントMztを0としてしまわないように、0よりも大きな値を下限値として減少補正する。
(もっと読む)
自動車用の制動装置および制動方法
【課題】自動車用の制動装置および制動方法を提供する。
【解決手段】可変特性曲線に従って、運転者が操作できるブレーキペダル装置12と、ブレーキペダル装置12の操作量に対応し、かつ可変特性曲線に対応する制動効果で自動車を制動する制動ユニット20と、可能特性曲線領域を保存するメモリ装置16と、可能特性曲線領域から可変特性曲線を選択するために設けられた制御ユニット14とを有する、自動車用の制動装置および制動方法を提供する。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う時定数可変の可変フィルタ処理部814と、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809と、建設車両の変速機の状態を判定する変速状態判定部808とを備え、時定数変更部809は、変速状態判定部808で変速機が変速中であると判定されると、可変フィルタ処理部814の時定数を現在よりも大きくする変速状態時定数変更部812を備える。
(もっと読む)
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
【課題】アクセルペダル誤操作を検出して車輪にブレーキトルクを発生させる技術において、ドライバがステアリングを適切に操作できない場合でも、車両が危険領域に進入してしまう可能性を従来よりも低減する。
【解決手段】アクセルペダルの誤操作を検出したとき、現在のタイヤ舵角で左側制動輪および右側制動輪にブレーキトルクを発生させたときに車両が安全領域から逸脱すると判定した場合には、車両の右側制動輪のみまたは左側制動輪のみにブレーキトルクを発生させる。これにより車両は、左右の両制動輪にブレーキトルクを発生したときの軌跡よりも、右側または左側にカーブする。
(もっと読む)
アンチスキッド制御装置
【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
1 - 20 / 139
[ Back to top ]