
Fターム[3D246JB21]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 挙動制御の制御輪選択 (157)
Fターム[3D246JB21]の下位に属するFターム
前輪と後輪とで制御 (37)
左右輪で制御 (92)
対角位置にある車輪で制御 (7)
Fターム[3D246JB21]に分類される特許
1 - 20 / 21
車両の制動制御装置
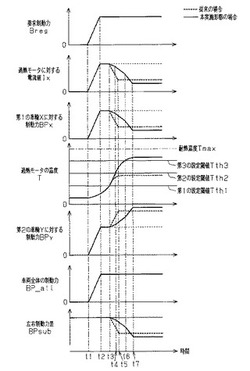
【課題】各モータのうち何れか一つのモータが過熱モータになった場合に、該過熱モータを保護するためのモータ保護制御の実行機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる車両の制動制御装置を提供する。
【解決手段】各車輪に個別対応する各電動ブレーキ装置はモータをそれぞれ備える。各電動ブレーキ装置を制御するブレーキ用ECUは、温度Tが第1の設定閾値Tth1以上となる過熱モータがあるか否かを判定する。そして、ブレーキ用ECUは、過熱モータが一つのみである場合(第3のタイミングt3)、過熱モータに対する電流値Ixを過熱モータの温度Tが低温である場合には高温である場合よりも緩やかな勾配で低下させる。
(もっと読む)
車両の制動力制御装置

【課題】車両旋回時のタイヤのコーナリングフォースを有効に最大限発揮させ、安定した車両挙動でカーブ外側へのコースアウトを確実に防止する。
【解決手段】車速V、ハンドル角θHに基づいて目標横加速度を算出し、目標横加速度と実際の横加速度とに基づいて車両1に付加すべき第1の付加ヨーモーメントMzt1を算出し、目標横加速度と実際の横加速度とに基づいて第1の付加ヨーモーメントMzt1に加えて車両1に付加すべき第2の付加ヨーモーメントMzt2を算出し、第1の付加ヨーモーメントMzt1に基づいて旋回内側車輪に付加する制動力を第1の制動力FB1として算出し、第2の付加ヨーモーメントMzt2に基づいて旋回内側車輪と旋回外側車輪との間の制動力差を変えることなく車両1に付加する制動力を第2の制動力FB2として算出し、第1の制動力FB1と第2の制動力FB2に基づいて各輪に付加する制動力を算出する。
(もっと読む)
制動力制御装置
【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
【解決手段】制動力制御装置はブレーキペダル31の操作により流体に圧力を発生させるマスタシリンダ33と、流体の圧力により制動力を発生させる制動装置37FL,37FR,37RL,37RRと、マスタシリンダと制動装置とを接続する配管と、配管内における流体の流れを遮断する第1の電磁弁(マスタカット弁41等)と、制動装置に流れる流体の圧力を保持する第2の電磁弁(保持弁50等)と、制動装置に流れる流体の圧力を減圧するために操作される第3の電磁弁(減圧弁58等)と、を備え、第1の電磁弁を制御する第1の差圧指示量と、第2の電磁弁を制御する第2の差圧指示量と、の差を所定値に制御し、第3の電磁弁を所定時間開くことにより制動力を制御する。
(もっと読む)
制駆動力制御装置
【課題】後輪の左右輪を共通の制動力制御機構で制御した場合に車両の挙動を安定化することができかつ迅速に車両を減速させることができること。
【解決手段】前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、制動操作の入力量を検出する操作検出部と、車両の挙動が予め設定した条件を満たしているかを判定する挙動判定部と、挙動判定部で予め設定した条件を満たしていると判定された場合、第1制動力調整部と第2制動力調整部で付与する制動力を調整し、当該目標旋回状態量と実旋回状態量との差を小さくする挙動安定化制御を実行する制動力制御部と、を備え、制動力制御部は、挙動安定化制御の実行中に制動操作が入力された場合、制動操作の入力量に基づいて制動力の制御モードを切り換えること。
(もっと読む)
液圧ブレーキシステム
【課題】液圧ブレーキシステムの制御系の異常時の走行安全性の向上を図る。
【解決手段】車両の重心G1が左右方向の中心から右側にある場合には、重心G1から右側の前後輪の接地点までのアームが、左側の前後輪の接地点までのアームより短くなる。それに対して、制御系の異常時に、メカ式増圧装置96の出力液圧が右前輪4,右後輪48,左前輪2のブレーキシリンダに供給されるため、右側の前後輪4,48に加えられる制動力の合計が左側の前後輪2,46に加えられる制動力の合計より大きくなる。その結果、車両にヨーモーメントが生じ難くすることができる。
(もっと読む)
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力を制御することにより、ピッチ挙動やを抑制するとともに上下方向振動を適切に抑制する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、車両Ve(より具体的には車体Bo)に発生したピッチ挙動を抑制するピッチ制御の実行中において、上下加速度センサ33から信号を入力し、車体Boの上下加速度Azを検知する。そして、ユニット30は、ピッチ制御に伴って各輪11〜14に発生させる駆動力Fの分力として推定されて車体Boに入力される上下力Fzと検知した上下加速度Azのそれぞれの作用方向が同一方向(振動増幅方向)であるときには各輪11〜14に発生させる駆動力Fを低減または「0」に制御する。一方、作用方向が互いに異なる方向(振動減衰方向)であるときには、駆動力Fを、上下力Fzと上下加速度Azとを用いて決定されるゲインKを乗算して補正する。
(もっと読む)
車両の経路追跡システム及び方法
前車軸及び後車軸の各車輪(6、9)に瞬間速度センサを含む自動車車両(1)の経路追跡システム。本発明によれば、システムは、同じ車軸(Aav及びAar)の車輪間の速度偏差を計算する手段(200及び201)と、各車軸の速度偏差間の差を計算する手段(202)と、この差を記憶された閾値(ε)と比較する手段(203)とを含む。本発明は、次の:各前車軸及び後車軸(Aav及びAar)の車輪の速度偏差を計算するステップと、各前車軸及び後車軸(Aav及びAar)間の速度偏差の差を計算するステップと、速度偏差の差を記憶された閾値(ε)と比較するステップとを含む自動車車両の経路追跡方法にも関する。 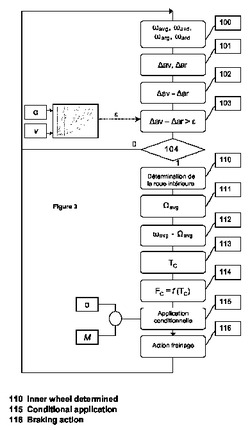 (もっと読む)
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なシステム構成にて実現する。
【解決手段】
車両の緊急状態を回避する回避制御の目標減速度を演算する回避制御手段と、選択車輪に制動トルクを付与して車両の安定性を確保する安定化制御の目標スリップ速度を演算する安定化制御手段と、実車輪速度を取得する車輪速度取得手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを目標減速度に基づいて制御するとともに、選択車輪に付与する制動トルクを選択車輪の目標スリップ速度、及び、非選択車輪の実車輪速度に基づいて制御する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。
【解決手段】
車両の緊急状態を回避するために車輪に制動トルクを付与する回避制御を実行するための第1目標量(回避制御の目標量)を演算する回避制御手段と、車両の安定性を確保するために、車輪のうちから選択車輪を決定し、この選択車輪に制動トルクを付与する安定化制御を実行するための第2目標量(安定化制御の目標量)を演算する安定化制御手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを第1目標量に基づいて制御するとともに、選択車輪に付与する制動トルクを、第1目標量及び前記第2目標量に基づいて制御する。
(もっと読む)
車両安定化制御装置
【課題】車両がカーブを安定して通過できないと予測される場合において車両を効果的に減速し得るアンダステア抑制制御を達成する車両安定化制御装置を提供すること。
【解決手段】ナビゲーション装置の地図情報に基づくカーブ形状と、現在の車速とに基づいて、カーブ進入前後において、車両がカーブを安定して通過できる可能性(Fg)が判定される。車両がカーブを適切に通過できると判定された場合(Fg=0)、アンダステア抑制制御の開始しきい値Kjが大きい値(デフォルト値K2)に設定され、且つ、車両のヨー特性が重視されるように各車輪の制動力が配分される第1特性(デフォルト特性Bm**)が選択される。一方、車両がカーブを適切に通過できないと判定された場合(Fg=1)、しきい値Kjが相対的に小さい値(K1)に調整され、且つ、車両の減速特性が重視されるように各車輪の制動力が配分される第2特性(Bg**)が選択される。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】自車両の車線変更などの横移動を抑制するタイミングを最適化する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定横位置XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方物体の側に横移動するときの走行車線に対する横速度Vxを検出し(ステップS6)、この横速度Vxが速いほど、後刻横位置Xfが所定横位置XLに達しやすくなるように、後刻横位置Xfを補正する。すなわち、横速度Vxが速いほど、1よりも大きい値になる補正ゲインαを算出し(ステップS7)、推定した後刻横位置Xfに補正ゲインαを乗じることで、この後刻横位置Xfを補正する(ステップS11)。
(もっと読む)
車両制御装置
【課題】バーストが取得された場合の車両の挙動の安定化を図る。
【解決手段】車輪側装置24から送信されたタイヤ情報に基づいて、タイヤ情報処理ECU48において空気圧が取得される。空気圧の変化勾配に基づいてバーストしたか否かが判定され、バーストしたとされた場合には、シートベルトECU306にシートベルトの張力を大きくする指令を出力し、駆動源ECU304に駆動力を低減させる指令を出力し、VSCECU302にバースト輪情報を出力する。VSCECU302においては、実際の車両の挙動を検出し、スピン傾向、ドリフトアウト傾向にある場合には、挙動安定化制御が行われる。その結果、バーストが生じても、良好に挙動を安定化させつつ、車両を停止させることができる。
(もっと読む)
4輪駆動車両の制御システムおよび制御方法
各車軸に少なくとも1つのパワートレインを備える4輪駆動ハイブリッド車両において、第1のパワートレイン(1)が少なくとも1つの熱機関を含み、第2のパワートレイン(2)が少なくとも1つの電気機械を含む。制御システムは、摩擦ブレーキシステムと、1つのパワートレインの少なくとも1つの電気機械であって抵抗トルクを与えることができる電気機械との間でブレーキ要求を振り分ける配分手段(9)、センサからの信号に応じてブレーキシステムとパワートレインを出力先とするトルク設定値変調手段(10)、ならびにパワートレインの制御手段(8)を含み、該配分手段(9)、該トルク設定値変調手段(10)およびパワートレインの該制御手段(8)が動的に相互に作用することができ、それによって車両の安定に有利となるようにパワートレインおよび摩擦ブレーキシステムに対してトルク命令を送出する。 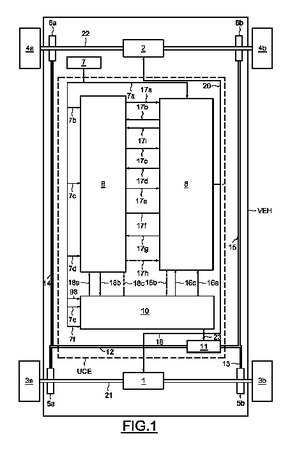 (もっと読む)
(もっと読む)
車両挙動制御装置
【課題】車輪の制駆動力を制御することによってヨーモーメントを発生させて車両の挙動を制御するに際し、車両の減速感または加速感を抑制する。
【解決手段】制動または駆動によるタイヤ前後力を選択した車輪3に個別に発生させることによって自動車1の挙動を制御する車両挙動制御装置10において、ヨー制御車輪選択部は、旋回時にタイヤ前後力を発生させる車輪として、旋回外側前輪および旋回内側後輪を選択し、制御割合設定部30は、車両の走行状態に応じてタイヤ前後力の制動と駆動との制御割合を設定し、調整前後力設定部31は、旋回時にヨー制御車輪選択部29によって選択された車輪のうちタイヤ前後力の絶対値が大きな車輪の左右に位置する車輪に対し、制御割合設定部30が設定した旋回外側前輪のタイヤ前後力と旋回内側後輪のタイヤ前後力との和Aが0となるような調整前後力(aまたは−a)を設定する。
(もっと読む)
車両の操舵制御装置
【課題】操舵操作部材の操作量の増大を抑制するための抑制トルクが小さくても、車両のアンダステアを効果的に抑制することができる車両の操舵制御装置を提供すること。
【解決手段】この装置では、アンダステア抑制制御として、操舵トルク制御(「抑制トルクTusの付与」)が実行される。操舵トルク制御では、運転者による操舵トルクTswに基づいて操舵トルクを軽減するためのEPSトルクTepsが演算され、アンダステアの程度を表すアンダステア状態量Jrusに基づいてステアリングホイールの「切増し」を抑制するための抑制トルクTusが演算される。運転者による操舵トルクを軽減するためのトルクが、「Teps−Tus」に調整される。ステアリングホイール操作角を維持するため、運転者は、Tusに相当する操舵トルクを余分に必要とし、アンダステアが抑制される。ここで、Jrusに対するTusの増大特性が下に凸の特性に設定される。
(もっと読む)
制動制御装置
【課題】高圧のブレーキ液圧供給時の液圧脈動に伴うブレーキ打音を抑制すること。
【解決手段】ブレーキ液圧の増圧対象となる制御対象輪(例えば前輪WFR,WFL)とブレーキ液圧の増減圧対象とならない非制御対象輪(例えば後輪WRR,WRL)とが少なくとも一輪ずつ存在している場合に、制御対象輪(前輪WFR,WFL)の制動力発生手段50FR,50FLに対するブレーキ液圧を増圧させるべく当該制御対象輪(前輪WFR,WFL)のブレーキ液圧調整手段40FR,40FLを制御し、そのブレーキ液圧調整手段40FR,40FLと上流側で連通状態にある非制御対象輪(例えば右側後輪WRR)のブレーキ液圧調整手段40RRの上流側のブレーキ液圧を低下させるべく当該非制御対象輪(右側後輪WRR)のブレーキ液圧調整手段40RRを制御するようにブレーキ液圧制御手段(電子制御装置1)を構成すること。
(もっと読む)
車両の挙動制御装置および制御方法
【課題】ドライバの意思を的確に反映して制御開始または制御終了がなされることによって、ヨー運動の応答性および収束性を向上し、強アンダーステアや強オーバーステアに陥る頻度が減少する車両挙動制御装置および制御方法を提供すること。
【解決手段】車両の旋回挙動制御装置において、車輪速センサ39と、ハンドル角センサ45とからの信号に基づいて、車両の目標ヨー角速度を算出する目標ヨー角速度算出手段50を備え、目標ヨー角速度とヨー角速度センサ41からの実ヨー角速度との偏差を算出するヨー角速度偏差算出手段51と、該偏差の時間的微分値であるヨー角加速度偏差を算出するヨー角加速度偏差算出手段52と、ヨー角速度偏差と前記ヨー角加速度偏差とに基づいてこれらの値が一定の範囲にあるときに前記車輪間の制動力制御を開始または終了することを特徴とする。
(もっと読む)
車輌の走行制御装置
【課題】乗員の車輌走行嗜好や運転者の運転意図に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分し、車輌の走行を適正に且つ効果的に制御する。
【解決手段】車輌を安定的に走行させるための車輌の目標ヨーモーメントMtが演算され(S20)、運転者特定ボタンの操作に基づき運転者が特定され(S130)、特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され(S140)、制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され(S150)、配分率ωs1、ωbに基づき転舵角制御の目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbが演算され(S160)、それぞれ目標ヨーモーメントMts及びMtbに基づき転舵角可変装置24及び制動装置36が制御される(S400〜430)。
(もっと読む)
車両の横方向ダイナミクスを制御するための方法及び装置
本発明は、車両(1)の横方向ダイナミクスを制御するための方法、及び車両(1)のための横方向ダイナミクス制御装置に関する。操作条件が満たされた場合には、シャーシ操作が実行される。この操作条件が満たされるのは、測定された横方向ダイナミクス外乱変数の絶対値が、外乱変数限界値よりも大きいときであり、また、下記の諸基準の中の1つ、又は下記の諸基準の中の複数の基準が満たされているときである。
− 車両縦方向速度が車両縦方向速度限界値よりも大きい、
− センサによって測定された実測ヨーレイトが、算出された現在のヨーレイト以下である、
− 運転者によって制動を通して引き起された、ブレーキトルク値を表しているブレーキトルクが、ブレーキトルク限界値以下である、
− 車両ホイールのシャーシスプリングにおける現在のスプリングのたわみを表すスプリングたわみ値が、スプリングたわみ限界値以下である、
− 2つのシャーシスプリングにおける現在のスプリングたわみの差を表すスプリングたわみ差異値が、スプリングたわみ差異限界値以下である、
− 2つの車両ホイールの間のスキッド差を表すスキッド差値が、スキッド差限界値以下である。
(もっと読む)
1 - 20 / 21
[ Back to top ]