
Fターム[3D246JB32]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 増圧制御 (357) | 開始、終了時期 (62)
Fターム[3D246JB32]に分類される特許
1 - 20 / 62
SBW車両の制御方法
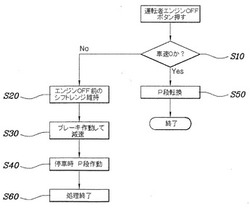
【課題】運転者が意図したエンジンオフ操作はもちろん不注意や非常事態によってエンジンオフ操作をする場合にも、急停車等のように車両の走行に障害をもたらしたり変速機の部品に損傷等が発生したりしないようにし、常に安定したP段転換がなされ、車両の出発時の急発進状況を防止するSBW車両の制御方法を提供する。
【解決手段】車両のエンジンオフ操作がなされると、現在の車速が0であるかを判断する車速判断段階と、現在の車速が0でない場合、エンジンオフ操作以前の変速段を維持する変速段維持段階と、変速段維持段階以後に制動装置を作動させて車速を減少させる減速段階と、減速段階以後の車の停車時にP段に転換するパーキングロック段階、とを含んで構成されたことを特徴とする。
(もっと読む)
ブレーキ装置

【課題】回生協調を行なうブレーキ装置において、ブレーキペダルを急操作したとき、ブレーキペダルに適度な反力を与えると共に液圧制御装置に円滑にブレーキ液を供給する。
【解決手段】ブレーキペダル19によってマスタシリンダ110でブレーキ液圧を発生させて、各車輪のホイールシリンダBa〜Bdに供給する。リザーバポート166、167を開いた状態で回生ブレーキ装置8により回生制動を行ない、液圧制御装置5によってホイールシリンダBa〜Bdに供給するブレーキ液圧を調整して回生協調制御を実行する。ブレーキペダル19の急操作に対して、リザーバポート166、167のオリフィスにより適度な反力を付与し、また、リザーバポート166、167をバイパスするバイパス通路180、181及び逆止弁182、183により、液圧制御装置5にブレーキ液を円滑に供給して、プライマリ及びセカンダリ室162、163の過度の減圧を防止する。
(もっと読む)
車輪回転速度制御装置
【課題】車両の停車時に発生する車輪回転速度センサからの誤信号を防止する車輪回転速度制御装置を提供する。
【解決手段】4輪の車輪を備える車両の各車輪それぞれの車輪回転速度を検出する車輪回転速度検出手段2a,2b,2c,2dと、各車輪それぞれのブレーキ圧を個別に加圧するブレーキ加圧手段7とを備え、ブレーキ加圧手段7は、車両が停止している状態で、車輪回転速度検出手段2a,2b,2c,2dにより各車輪のいずれかが回転していることが検出された場合に、予め定められた所定時間、車輪のブレーキ圧を加圧する。
(もっと読む)
車両のブレーキ制御装置
【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧アクチュエータと、統合コントローラとを備え、統合コントローラは、停車時モータオフ制御部と、昇圧勾配制限部とを有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータを停止し、車両停止中、VDCモータの停止状態を維持したままとする。昇圧勾配制限部は、車両停止状態からの車速発生により停車時モータオフ制御を終了するとき、ドライバのブレーキペダルリリース前の目標減速度と、そのときのホイールシリンダ圧による実減速度と、の差異が大きくなるほど、VDCモータの作動再開に伴うホイールシリンダ圧の上昇勾配を小さくする。
(もっと読む)
衝突回避装置
【課題】ユーザーが煩わしさを感じることのないPCS制御を行うことのできる衝突回避装置を提供する。
【解決手段】検出手段と、検出された物体を衝突判断対象物とし、当該衝突判断対象物と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断対象物と自車両との衝突を回避するための衝突回避制御を行う制御手段と、衝突回避制御を解除する解除手段と、自車両の位置を示す情報および自車両の車両情報の少なくとも一方の情報を取得する車両情報取得手段と、衝突回避制御の態様を変更する変更手段と、解除手段によって衝突回避制御が解除されたときの自車両の位置を示す情報を解除時位置情報として、解除手段によって衝突回避制御が解除されるときの自車両の車両情報を解除時車両情報として車両情報取得手段から少なくとも一方を取得し記憶する記憶手段とを備える。
(もっと読む)
衝突回避制御装置及び方法
【課題】衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻すことが可能な衝突回避制御装置を提供する。
【解決手段】衝突回避制御が実行中で、かつ対象物が移動物である場合、自車両と対象物との相対速度が予め定めたゼロ以上の閾値を超えるか否かが判断される。この相対速度が当該閾値未満の間は衝突回避制御が継続して実行され、この相対速度が当該閾値以上になったタイミング、すなわち自車両の走行速度が対象物の走行速度よりも遅くなったタイミングで衝突回避制御が終了する。
(もっと読む)
車両用運転支援装置
【課題】特別なセンサを装備することなく、自動ブレーキが作動した際の自車両の停止前後に発生するピッチング振動を抑制し、良好な乗り心地性を得ることができるようにする。
【解決手段】始動ブレーキ作動後の減速度Gwに基づいて減圧開始距離Pdを求め(S9)、自車両と前方障害物との間の障害物間距離Lが、前方障害物に対する停止目標距離Lsに減圧開始距離Pdを加算した距離に達したとき、ブレーキ圧の減圧を開始し(S11)、自車両の停止前後で発生するピッチング振動を抑制する。そして、障害物間距離Lが停止目標距離Lsの手前の停止ブレーキ開始距離pに達したとき、ブレーキ圧を加圧させて(S13)、自車両を停止させる。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】緊急制動操作されていない場合に、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御が不用意に開始されることを抑制することができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVに外乱に基づく振動成分が含まれるか否かを判定する(ステップS74,S76)。そして、ブレーキ用ECUは、含まれると判定した場合に(ステップS74又はステップS76がYES)、第1の減速判定値DV_stを、含まれないと判定した場合よりも大きな値に補正し(ステップS79)、車体減速度DVが第1の減速判定値DV_stを超えると共に、Gセンサ値Gが第2の減速判定値G_stを超える場合に(ステップS84,S89:YES)、補助制御を開始する。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両の走行する路面の勾配情報に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切なタイミングで開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の走行する路面の勾配情報を取得し、該勾配情報に基づき第1の減速判定値DV_stを補正する(ステップS79)そして、ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えると共に、Gセンサ値Gが第2の減速判定値G_stを超えた場合に(ステップS84,S89:YES)、補助制御を開始する。
(もっと読む)
駆動力伝達装置
【課題】装置を小型軽量化できると共に応答遅れを極めて少なくでき、さらに前輪または後輪のスリップ時のトラクションを向上できる駆動力伝達装置を提供すること。
【解決手段】駆動源5の駆動トルクは中央差動制限装置7から前部差動装置4及び後部差動装置10に分配され、前部差動装置4及び後部差動装置10に分配された駆動力は、前輪2FL,2FR及び後輪2RL,2RRに分配される。前部差動装置4及び後部差動装置10の少なくとも一方と、中央差動制限装置7とはトルク感応式の差動制限装置で構成されているので、装置を小型軽量化できる。また、車輪2のスリップ時には、スリップした車輪2の駆動力が、トルク感応式の中央差動制限装置7により前輪2FL,2FR又は後輪2RL,2RRに増幅して非差動で分配される。その結果、スリップ時のトラクションを向上できると共に、時間的な応答遅れを極めて少なくできる。
(もっと読む)
液圧ブレーキシステム
【課題】動力制御圧供給状態からマニュアル液圧供給状態に切り換えた後の運転者の違和感を軽減し、作動音を低減させる。
【解決手段】動力制御圧供給状態からマニュアル液圧供給状態に切り換えられた時以後に、ブレーキペダルの操作状態がほぼ一定である場合には、マニュアル液圧Pmは、過渡的に、一旦低下した後に増加する。それにより、運転者は違和感を感じる。また、作動音が発せられる。それに対して、減圧リニア制御弁の制御により、ブレーキシリンダ液圧の増加勾配が抑制されるとともにマニュアル液圧の増加勾配が抑制される。それによって、運転者の違和感を軽減し、作動音を低減させることができる。
(もっと読む)
ブレーキ装置及びこれを備えた軌道系車両
【課題】メンテナンスコストの低減を図ることができるとともに、常用ブレーキの故障時であっても非常ブレーキを作動させることが可能なブレーキ装置及び該ブレーキ装置を備えた軌道系車両を提供する。
【解決手段】空気バネ310の圧力に基づいて、圧縮空気源300の空気圧から非常ブレーキ時のブレーキ圧に相当する応荷重圧を生成する応荷重弁10と、常用ブレーキ時に圧縮空気源300の空気圧を出力する一方、非常ブレーキ時に応荷重圧力を出力する切換弁40と、常用ブレーキ時に切換弁40から供給される空気圧を調圧してブレーキ圧として出力するとともに、非常ブレーキ時に切換弁40から供給される応荷重圧をブレーキ圧として出力する圧力制御弁60とからブレーキ装置1を構成する。
(もっと読む)
駆動力分配装置
【課題】 電動モータにより歯車手段の回転を制御して駆動力を分配する際に、2つの出力軸に大きな回転差が発生しても歯車手段の歯車や各回転要素の回転速度が許容回転速度を超えることがない駆動力分配装置を提供する。
【解決手段】 遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第1の許容回転速度を超えた場合、ブレーキ指示をONにして左右の後輪6に制動力を働かせ、遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第2の許容回転速度を超えた場合、エンジン2の出力が低減され、左右駆動力分配装置11の歯車等の部品(軸受け)の回転速度の上昇を抑制し、左右の後輪6に大きな回転差が発生しても歯車や各回転要素の回転速度が許容回転速度を超えないようにする。
(もっと読む)
ブレーキ制御装置
【課題】電動倍力装置を用いたブレーキ制御装置において、ブレーキペダルの操作によりシステム起動したときのHSA制御実行中にもブレーキペダルの解放を適切に検知する。
【解決手段】ブレーキペダルBの操作に基づき、電動モータ40を制御し、プライマリピストン10を推進してマスタシリンダ2で液圧を発生させる。車両が坂道で停止し、ブレーキペダルBを解放したとき、液圧を所定時間保持した後、減圧することにより坂道発進を補助する。ストロークセンサ80及び液圧センサ72の0点学習前にHSA制御を実行した際、マスタシリンダ2の液圧について、HSA保持液圧と、ブレーキペダルBの操作による入力ピストン32の変位量に対応する目標液圧とを比較し、目標液圧がHSA保持液圧以下の場合又はブレーキスイッチ81がオフとなった場合にブレーキペダルBの解放と判断し、マスタシリンダ2の液圧をHSA保持液圧で所定時間保持した後、減圧する。
(もっと読む)
ブレーキ装置
【課題】ペダルフィーリングの良好なブレーキ装置を提供する。
【解決手段】本ブレーキ装置のコントローラは、HSA制御の作動中、ブレーキペダルの操作を検出したときに、電動モータに対して、ブレーキペダルの操作量に対応した液圧を保持するように制御する。これにより、HSA制御中にブレーキペダルが踏み込まれた際、運転者の意図に沿ったペダルフィーリングを得ることができる。
(もっと読む)
車両停止保持装置
【課題】パーキングロック機構のロック状態を解除した時に、車両の予期せぬ移動を防止する車両停止保持装置の提供。
【解決手段】車両が所定の条件を満足した時、コントローラ3は車両が停止状態にあると判断し、シフト機構13によってシャフトロック機構14を作動させ、自動変速機1のアウトプットシャフト11を機械的にロックし、車両を停止状態で保持する。シャフトロック機構14によって、車両が停止保持された状態にある場合において、運転者がアクセルペダル97を操作すると、コントローラ3はシャフトロック機構14によるアウトプットシャフト11のロックを解除するとともに、ブレーキECU5に対して加圧要求を発する。加圧要求を受けたブレーキECU5は、液圧ブレーキ装置6を作動させて、ブレーキペダルの操作に拘わらず、ブレーキ液圧をホイルシリンダに供給する。
(もっと読む)
自動ブレーキ装置
【課題】自動ブレーキの不要な作動をより早い段階で抑制する。
【解決手段】ブレーキ機構2を作動させるアクチュエータ3と、アクチュエータ3の作動を制御する制御手段1とを備えた自動ブレーキ装置において、車両の前方を走行する先行車両の情報を検出する車両前方情報検出手段4,5と、前方情報に基づき車両と先行車両とが衝突する可能性を予測する衝突予測手段1aと、前方情報に基づき、先行車両が車両の走行領域から外れるか否かを予測する先行車両走行予測手段1bと、車両と先行車両とが衝突を回避できるか否かを判定する衝突回避判定手段1cと、を備える。制御手段1は、衝突予測手段1aにより衝突可能性があると予測されたら、衝突回避判定手段1cにより衝突を回避できると判定されない限りアクチュエータ3を作動させ、衝突を回避できると判定されたら、アクチュエータ3を非作動にする。
(もっと読む)
車両用ブレーキ装置
【課題】回生ブレーキ装置における回生可能制動力を知りつつ制動制御を行うことで、良好な制動フィーリングおよび高い回生効率が得られる車両用ブレーキ装置を提供する。
【解決手段】液圧制動力を車輪に付与する液圧ブレーキ装置と、発電電動機に駆動される駆動輪に回生制動力を付与する回生ブレーキ装置と、液圧制動力および回生制動力を協調制御する制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、発電電動機に指令した回生要求制動力FRから発電電動機が実行した回生実行制動力FGを減算して差分量DFを演算する手段(S9)と、回生要求制動力FRが発電電動機の実行可能な回生可能制動力FX(FXU、FXL)の範囲内であるか否かを判定する手段(S11)と、差分量DFが正でかつ回生要求制動力FRが回生可能制動力FXの範囲内である場合に液圧制動力FCの増加を抑制する手段(S12)と、を有する。
(もっと読む)
差動制限機構の制御装置
【課題】要求されるLSD(差動制限機構)の作動と、LSDの作動により生じる操舵反力変化に起因して発生する操舵違和感の抑制とをバランスさせることができるようにした、差動制限機構の制御装置を提供する。
【解決手段】車両の左右輪の差動を制限する差動制限機構5と、差動制限機構5を制御する制御手段10とを有する車両において、車両の操舵角を検出する操舵角検出手段8aと、車両の操舵トルクを検出する操舵トルク検出手段9と、を有し、制御手段10は、操舵角検出手段8aにより検出した操舵角の方向と、操舵トルク検出手段9により検出した操舵トルクの方向とが異なった際に、差動制限機構5の制御量を減少させる。
(もっと読む)
コンピュータプログラム及び数値計算装置
【課題】分布定数系の微分方程式を少ない演算量で解けるようにする。
【解決手段】全ての計算時刻について値が与えられる第1の変数と、初期値のみが与えられる第2の変数とで定義される被積分関数に関する積分演算をコンピュータで実行し、各計算時刻で使用する前記第2の変数の値を算出するために、以下の処理を実行する。まず、被積分関数を第2の変数について偏微分して求めた偏導関数を記憶装置から読み出す。各計算時刻では、初期値又は直前回の計算時刻に算出された第2の変数の値と、現計算時刻に与えられる第1の変数の値を、被積分関数と偏導関数にそれぞれ代入して現計算時刻における被積分関数の値と偏導関数の値をそれぞれ算出する。この後、算出された被積分関数の値を初期値とし、かつ、当該被積分関数の値に偏導関数の値を乗算して算出された値を傾きとする指数関数を用い、次回計算時刻に使用する第2の変数の値を算出する。
(もっと読む)
1 - 20 / 62
[ Back to top ]