
Fターム[3D246JB35]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 増圧制御 (357) | 増圧速度の変更 (67)
Fターム[3D246JB35]に分類される特許
1 - 20 / 67
車両の制動制御装置
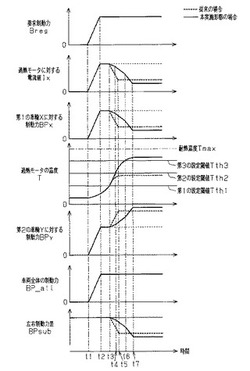
【課題】各モータのうち何れか一つのモータが過熱モータになった場合に、該過熱モータを保護するためのモータ保護制御の実行機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる車両の制動制御装置を提供する。
【解決手段】各車輪に個別対応する各電動ブレーキ装置はモータをそれぞれ備える。各電動ブレーキ装置を制御するブレーキ用ECUは、温度Tが第1の設定閾値Tth1以上となる過熱モータがあるか否かを判定する。そして、ブレーキ用ECUは、過熱モータが一つのみである場合(第3のタイミングt3)、過熱モータに対する電流値Ixを過熱モータの温度Tが低温である場合には高温である場合よりも緩やかな勾配で低下させる。
(もっと読む)
車両の制御装置

【課題】旋回走行時の車両挙動を安定させるための駆動力制御および制動力制御を、運転者に違和感やショックを与えることなく、適切に実行することができる車両の制御装置を提供すること。
【解決手段】操舵角および横加速度に基づいて駆動力もしくは制動力を補正して変化させることにより、旋回走行時の車両挙動を安定させる制駆動力制御を実行可能な車両の制御装置において、ステアリングの切り込み操作および戻し操作における操作時間および/または操作速度を検出するステアリング操作検出手段(ステップS105,S106,S107,S108)と、前記切り込み操作および前記戻し操作が行われる際に、前記操作時間もしくは前記操作速度に基づいて、前記補正により前記駆動力もしくは前記制動力を変化させる際の変化速度を設定する制駆動力設定手段(ステップS110,S111)とを設けた。
(もっと読む)
車両挙動制御システム
【課題】車両の挙動を安定化させることができる車両挙動制御システムを提供することを目的とする。
【解決手段】車両2の各車輪3に生じる制動力を個別に調節可能な制動装置7と、制動装置7を制御して車輪3のスリップ状態を制御するABS制御及び車両2の旋回状態を制御する旋回制御を実行可能な制御装置8とを備え、制御装置8は、ABS制御及び旋回制御の作動中に、車両2に作用する横方向加速度の絶対値が予め設定された所定加速度以下である場合に制動力の増加勾配を制限する一方、横方向加速度の絶対値が所定加速度より大きい場合に制動力の増加勾配を制限せず、さらに、制御装置8は、旋回制御における旋回制御量の絶対値が予め設定された所定制御量より大きい場合には制動力の増加勾配を制限しない。
(もっと読む)
車両のブレーキ制御装置
【課題】エンジンを自動停止した後にエンジンの再始動に失敗し、その後のポンピングブレーキ操作等によってエンジンの吸気負圧が減少した場合であっても、制動力の低下を防ぐことができる車両のブレーキ制御装置を提供すること。
【解決手段】エンジン自動停止・再始動制御手段と、作動中のエンジン1の吸気負圧を利用して運転者のブレーキ踏力をアシストするブースタ(踏力アシスト手段)14と、電動モータ26によって駆動されるポンプによって所要のブレーキ液圧を発生する加圧制御ユニット21と、を備えた車両のブレーキ制御装置(ECU)13において、再始動条件の成立後にエンジン1の再始動が確認できない状態で車両が走行している場合であって、且つ、ブースタ14の負圧が設定値以上(負圧不足)であるときには加圧制御ユニット21によってブレーキ液圧を加圧してブースタ14によるアシスト力の不足を補うようにする。
(もっと読む)
ブレーキ制御装置
【課題】
ドライバの違和感を抑制することができるブレーキ制御装置を提供すること。
【解決手段】
ドライバによるブレーキペダル2の操作に対してマスタシリンダ4の圧力の上昇が抑制される無効ストローク動作中に、マスタシリンダ4内のブレーキ液を用いてホイルシリンダ5の圧力を調整する際、マスタシリンダ4とホイルシリンダ5を接続する第1ブレーキ回路(供給通路11)上に設けられたノーマルオープン型の電磁弁(ゲートアウト弁20)に対し、弁体200が閉弁する所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、連続して所定電流Iinitialより低い電流Ibalance(t)を通電する第2通電部72と、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)へ漸近させて移行する移行通電部73とを備えた。
(もっと読む)
車両のブレーキ制御装置
【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧アクチュエータ2と、統合コントローラ9と、を備え、統合コントローラ9は、停車時モータオフ制御部(ステップS9)と、昇圧勾配制限部(ステップS15〜ステップS20)と、を有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータ21を停止し、車両停止中、VDCモータ21の停止状態を維持したままとする。昇圧勾配制限部は、停車時モータオフ制御を終了すると、ホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする。
(もっと読む)
車両用制動支援装置
【課題】坂路にて自車両の停止中に自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止する。
【解決手段】車両用衝突回避制動支援装置1は、障害物との接近に関するリスクポテンシャルを算出するリスクポテンシャル演算部31と、走行路の勾配を検出する外乱推定部32と、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する制動力演算部40とを備える。
(もっと読む)
車両のブレーキ制御装置
【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧アクチュエータと、統合コントローラとを備え、統合コントローラは、停車時モータオフ制御部と、昇圧勾配制限部とを有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータを停止し、車両停止中、VDCモータの停止状態を維持したままとする。昇圧勾配制限部は、車両停止状態からの車速発生により停車時モータオフ制御を終了するとき、ドライバのブレーキペダルリリース前の目標減速度と、そのときのホイールシリンダ圧による実減速度と、の差異が大きくなるほど、VDCモータの作動再開に伴うホイールシリンダ圧の上昇勾配を小さくする。
(もっと読む)
車両制御装置
【課題】 ペダル吸い込まれ感をより低減できる車両制御装置を提供する。
【解決手段】 ブレーキペダルBPのストローク量を検出するストロークセンサ42と、ストローク量がSTrmax未満の場合、最大回生制動力Frmaxと等しい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第1回生制動力算出部32aと、ストローク量がSTrmax以上の場合、最大回生制動力Frmaxより小さい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第2回生制動力算出部32bと、要求回生制動力Frreqに基づいて実際に発生された回生制動力の検出値である実行回生制動力Frと液圧制動力との和が車両に必要な制動力である要求総制動力Freqとなるように、要求総制動力Freqと実行回生制動力Frとの差分を要求液圧制動力Fwcreqとして算出する制動制御部32cと、を有するBCU32を備えた。
(もっと読む)
車両用制動力制御装置
【課題】車両がスプリットμ路を走行する際の前一輪のアンチスキッド制御に起因して車両に作用する余分なヨーモーメントを低減しつつ、従来の制動力制御装置の場合に比して後輪の横力が不足する虞れを低減する。
【解決手段】必要に応じて各車輪の制動力を相互に独立に制御可能な制動装置を有する車両用制動力制御装置に係る。一方の前輪に於いてアンチスキッド制御が開始され(ステップ150)、左右の路面の摩擦係数が異なる走行路に関し予め設定された条件が成立していると判定されると(ステップ200)、一方の前輪とは左右反対側の前輪の制動力の増大を抑制すると共に、左右の後輪のうち少なくとも一方の前輪とは左右反対側の後輪の制動力の増大を抑制する(ステップ500又は700)。一方の前輪とは左右反対側の前輪の制動力の増大抑制度合は後輪の制動力の増大の抑制が行われない場合の抑制度合に比して小さい。
(もっと読む)
車両制御装置
【課題】大型化を回避しつつ音振性能を確保し、安価でありながら適切な回生協調制御を達成可能な車両制御装置を提供すること。
【解決手段】モータを駆動源とする車両において、制動時にモータによる回生制動力と油圧による摩擦制動力とを協調させる回生協調制動力の制御において、回生協調制御により回生制動力から摩擦制動力にすり替えるときは、設定したすり替え速度範囲において、ギヤポンプの能力や音振性能への影響を及ぼさない範囲で、各制動力の変化勾配を最大変化勾配より小さな所定勾配以下に制限することで所望の制動力を得るととした。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ペダルフィーリングの悪化を抑えつつ、入口弁(常開型比例電磁弁)のハンチングを抑えることを目的とする。
【解決手段】制御部は、常開型比例電磁弁の通電量を第1勾配で減少させる際に、通電量を増加側にオフセットするオフセット制御を実行するオフセット手段を有し、オフセット手段は、第1勾配での通電量の減少を開始した時点(時刻t1)から所定時点(時刻t3)までの初期期間T1と、第1勾配での通電量の減少中に、車輪ブレーキに連通する他の車輪ブレーキが減圧された場合における減圧後のポンプ駆動期間T2と、の間だけオフセット制御を実行する。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】緊急制動操作されていない場合に、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御が不用意に開始されることを抑制することができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVに外乱に基づく振動成分が含まれるか否かを判定する(ステップS74,S76)。そして、ブレーキ用ECUは、含まれると判定した場合に(ステップS74又はステップS76がYES)、第1の減速判定値DV_stを、含まれないと判定した場合よりも大きな値に補正し(ステップS79)、車体減速度DVが第1の減速判定値DV_stを超えると共に、Gセンサ値Gが第2の減速判定値G_stを超える場合に(ステップS84,S89:YES)、補助制御を開始する。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
駆動力分配装置
【課題】 電動モータにより歯車手段の回転を制御して駆動力を分配する際に、2つの出力軸に大きな回転差が発生しても歯車手段の歯車や各回転要素の回転速度が許容回転速度を超えることがない駆動力分配装置を提供する。
【解決手段】 遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第1の許容回転速度を超えた場合、ブレーキ指示をONにして左右の後輪6に制動力を働かせ、遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第2の許容回転速度を超えた場合、エンジン2の出力が低減され、左右駆動力分配装置11の歯車等の部品(軸受け)の回転速度の上昇を抑制し、左右の後輪6に大きな回転差が発生しても歯車や各回転要素の回転速度が許容回転速度を超えないようにする。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、マスターシリンダ圧発生開始ポイントのメカバラツキ影響を排除した制動目標値を設定することにより、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。統合コントローラ9は、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、ブレーキ操作によりマスターシリンダ圧の発生が開始されるブレーキペダルストローク位置を検出し、検出された実マスターシリンダ圧発生開始ポイントでの目標減速度が、上乗せ制動分の最大値(回生ギャップ)になるように、ストローク変化に対して滑らかに変化する目標減速度特性を設定する(図4)。
(もっと読む)
車両用制動力制御装置
【課題】制動装置の失陥の有無を正確に判定すると共に、失陥があるときには余分なヨーモーメントの増大や車両の減速度の低下が抑制されるよう後輪の制動力を制御する。
【解決手段】ダイヤゴナル二系統の制動装置を有し、制動時に前輪に対する左右後輪の車輪速度の関係が目標の関係になるよう左右後輪の制動圧を個別に制御することにより制動力の前後輪配分制御を行う制動力制御装置。一方の系統の一方の車輪と他方の系統の一方の車輪との間の車輪速度の差の大きさ、又は一方の系統の他方の車輪と他方の系統の他方の車輪との間の車輪速度の差の大きさが閾値を越えるか否かを判定する(S170、270)。越えるときには、左右後輪のうち車輪速度が高い方の車輪を含む系統が失陥していると判定し、他方の後輪について制動力の前後輪配分制御による制動圧の低減を行わない(S190、290)。
(もっと読む)
車両の制御装置
【課題】 運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールド状態と判定されたときは、車輪に機械的制動トルクを付与すると共に、駆動源と駆動輪の間のクラッチの締結トルクの出力を減少させる締結要素保護制御を実行する。このとき、機械的制動トルクの増加勾配を、路面勾配が大きい程大きな増加勾配に設定することとした。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及びトラクション制御が同時に実行される場合に、車輪速度を検出する装置の異常に起因して基準車輪速度が不適切な値になりトラクション制御が不適切に実行されることを防止する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されているときには、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに基づいて車輪の駆動スリップを判定するための基準車輪速度Vwbを設定する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御よって旋回内輪の前後力が低減されることに起因して運転者が走行阻害感の如き不満を感じる虞れを低減する。
【解決手段】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御を行う車両の走行制御装置。車輪の駆動力により車両を駆動することの困難性が高いときには該困難性が低いときに比して旋回内輪の前後力の低減が開始され難くし、また旋回内輪の前後力の低減量を小さくする。上記困難性は車輪の駆動力による車輪の移動に対する抵抗及び車輪から路面への駆動力の伝達のし難さの少なくとも一方を含み、例えば車両の実際の加速度と運転者の駆動操作量に基づく車両の規範加速度との偏差に基づいて判定される。
(もっと読む)
1 - 20 / 67
[ Back to top ]