
Fターム[3D246JB39]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 予圧制御 (27)
Fターム[3D246JB39]に分類される特許
1 - 20 / 27
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、ブレーキパッドとロータとの間にクリアランス変化が発生しても、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
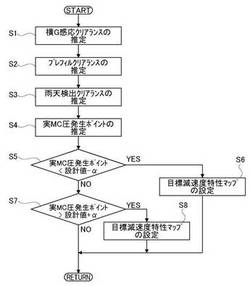
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧ユニットと、モータコントローラと、統合コントローラと、を備える。統合コントローラは、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、推定したブレーキパッドとロータとの間のクリアランス量が設計値のクリアランス量に対して変化する場合に、実MC圧発生ポイントでの目標減速度が、上乗せ制動分の最大値となるように、設計値からのクリアランス変化量に応じて目標減速度特性を設定する。
(もっと読む)
電動油圧式ダイナミックブレーキシステムおよび制御方法

【課題】ダイナミック動作する電動油圧式ブレーキシステムの簡素化。
【解決手段】第1のチャンバ122とブレーキ液リザーバ14との間の接続部は、電磁弁50を備えている。制御回路40は、選択または指定された制動モードに従ってリザーバ14の電磁弁50と高圧畜圧器60の電磁弁70とを制御する。ダイナミック制動段階は、閾値速度に減速するまで車輪ブレーキFR1−4からマスタシリンダ10を遮断しながらエネルギー回生を伴うステップと、その後、停止まで第1のチャンバ122だけを高圧畜圧器60とESPモジュール30とに接続することによって、高圧畜圧器60の加圧下で上記モジュールにブレーキ液を供給するとともに、機械的な制動のために車輪ブレーキFR1−4を供給するステップとの2つのステップに分けられる。
(もっと読む)
車両挙動制御装置
【課題】応答性良く予備ブレーキ圧を印加すること。
【解決手段】前後の旋回外輪WFL,WRL(WFR,WRR)の内の少なくとも一方に制動制御量を発生させることで車両10の挙動を安定させる車両挙動安定化制御を行う場合、その制動制御量を前後夫々の旋回外輪WFL,WRL(WFR,WRR)に発生させる条件が成立した場合に、前後の旋回内輪WFR,WRR(WFL,WRL)の内の少なくとも一方に対して予備ブレーキ圧を印加すること。その予備ブレーキ圧の印加は、車両挙動安定化制御の実行中に今の車両10の旋回動作とは逆向きの操舵操作が検知されたときに実行する。
(もっと読む)
車両用ブレーキ制御装置
【課題】制御弁を駆動しなくても、ブレーキ操作時に予め摩擦材と被摩擦材との間のクリアランスを減少させて、ブレーキの遊びが減少させられるようにする。
【解決手段】ダイアフラム233を備えた調圧リザーバ20を備え、ドライバがブレーキ操作を開始したときに、モータを駆動してポンプを作動させることでダイアフラム233を変形させ、その変形分のブレーキ液をW/C4、5側に移動させることで、ブレーキ液の遊びを減少させる。これにより、単にポンプを作動させるだけで、差圧制御弁を駆動しなくてもブレーキ操作時に予め摩擦材であるブレーキパッドと被摩擦材であるブレーキディスクとの間のクリアランスを減少させることが可能となる。
(もっと読む)
車両運動制御システム
【課題】車両安定性の低下を簡易に予測できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、車輪速度、車体速度、前後加速度および横加速度、実ヨーレート、操舵角、アクセル開度、ブレーキ踏力など車両状態量に基づいて、耐ロールオーバー制御、US/OS抑制制御などの車両運動制御を行う制御装置5を備えている。また、制御装置5は、現在の車両状態量と、車両状態量の履歴および車両運動制御の実施履歴を含む過去の制御履歴とに基づいて、将来的な車両安定性の低下を予測する安定性低下予測部53を有している。
(もっと読む)
車両挙動制御装置
【課題】旋回方向が切り替わった際のブレーキ液圧の制御応答性を向上させること。
【解決手段】実際の旋回状態と目標旋回状態との偏差に応じた制動力を所定の制御対象輪WFRに発生させることで車両挙動の安定化制御を行う際、2つのブレーキ液圧の液圧系統の中で制御対象輪WFRの属するものを液圧制御対象に設定して当該液圧系統のマスタカット弁41を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁42を開弁させ、制御対象輪WFRに前記制動力を発生させる車両挙動制御装置であって、旋回方向の切り替わりが予測された場合、切り替わり後の旋回方向における偏差に応じた制動力を次の制御対象輪WFLに対して発生させる前に、次の制御対象輪WFLの属する今現在は非液圧制御対象の液圧系統のマスタカット弁42を閉弁させると共に、次の制御対象輪WFRに対してブレーキ液圧の予圧を付与すること。
(もっと読む)
列車制御装置
【課題】実際の列車運行に適合したブレーキ制御を実行し、列車のブレーキ動作遅れ時間を短縮し、列車停止時間の短縮を図り、運転時隔の短縮に寄与し得る列車制御装置を提供すること。
【解決手段】 速度検出器20と、車上装置4と、ブレーキ装置3とを含む構成であって、速度検出器20は、列車2に搭載され、列車速度を検出する。車上装置4は、速度検出器20から供給される速度信号と、力行条件信号Bの有無とを入力条件にして、惰行走行を検知する。そして、惰行走行が検知されたとき、予備ブレーキ信号Cを生成し、ブレーキ装置3に、予備ブレーキ制御を与える。
(もっと読む)
緊急制動装置
【課題】簡易な構成で、衝突の可能性を確実に検出可能とする。
【解決手段】運転者における筋電位の発生を検出し、車両の制動装置を動作せしめるよう構成されてなる緊急制動装置であって、車両のハンドル1aに筋電位計101が設けられ、筋電位計101により検出された筋電位が所定の判定レベルLs’を超えた際に、ホールシリンダ104を動作せしめるよう構成されてなり、筋電位計101は、アースに接続されたアース側電極と、アースから分離された正電位電極がハンドルの把持部1aに設けられ、正電位電極に筋電位が得られるよう構成されたものとなっている。
(もっと読む)
車両の走行安全制御装置
【課題】事前に渋滞末尾を予測し、自車両が渋滞末尾に近づいたときに被害軽減ブレーキの準備を行うことで、走行路の状況に関わらず円滑に被害軽減ブレーキ制御を実行することのできる車両の走行安全制御装置を提供すること。
【解決手段】カメラに撮影した「渋滞」の文字を含む電光表示を抽出し(S1)、当該表示内容に応じて渋滞末尾を推定し(S4)、当該渋滞末尾までの距離が所定距離未満であるときには被害軽減ブレーキの準備を行う(S5,S6)。
(もっと読む)
自動停止制御装置及び道路交通情報システム
【課題】自動停止制御装置及び道路交通情報システムに関し、信号機の全赤時間における交差点内の通過を抑制しながら車両をスムーズに通行させる。
【解決手段】インフラ情報検出手段6aで自車両の前方の交差点における出口地点の位置を検出し、信号情報検出手段6bで該交差点で黄色信号が終了するまでの第一時間を検出し、自車両情報検出手段6dで該自車両の位置及び車速を検出する。
また、距離算出手段8aにより、該出口地点の位置と該自車両の位置とに基づいて該出口地点までの第一距離を算出する。
さらに、予測判定手段8bにより、該第一時間と該第一距離と該車速とに基づいて、該黄色信号が終了するときに該自車両が該交差点から脱出するか否かを予測判定する。
該自車両が該交差点から脱出しないと予測された場合には、自動制動手段9により、該自車両の自動制動を実施する。
(もっと読む)
車両用制動制御装置
【課題】車両用制動制御装置において、コストの増加を抑制すると共に制動操作フィーリングの向上を図る。
【解決手段】ブレーキペダル11の操作により発生した作動油の圧力であるマスタシリンダ圧力を出力可能なマスタシリンダ13と、マスタシリンダ13とは無関係に作動油を加圧することで発生した加圧圧力を出力可能な油圧ポンプ51,52と、車両の走行状態に応じてマスタシリンダ圧力及び加圧圧力をホイールシリンダ27FR,27RL,27FL,27RRに出力するECU101とを設けて構成し、ブレーキ踏力を検出する踏力センサ14bを設け、ECU101は、踏力センサ14bが所定踏力を検出したときに油圧ポンプ51,52を作動させる。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感となる不必要な予圧制御(予備制御)を抑制する。
【解決手段】
車輪の制動トルクを制御する制動手段と、車両の操舵角速度を取得する操舵角速度取得手段と、操舵角速度取得手段の取得する操舵角速度に基づいて基準横加速度を決定する決定手段と、車両の実横加速度を取得する実横加速度取得手段とを備える。決定手段は、操舵角速度が大きいほど基準横加速度を小さい値に決定し、或いは、操舵角速度が小さいほど基準横加速度を大きい値に決定する。実横加速度取得手段が取得する実横加速度が基準横加速度を超えたときに、制動手段を介して車輪への制動トルク付与を開始する。
(もっと読む)
自動車の周囲環境のモニタリング方法
【課題】 自動ブレーキの不適切な作動を防止しながら、1つの進路にしたがって移動することができる自動車の周囲環境をモニタする方法を提供する。
【解決手段】 本発明の方法は、検出センサ、自動車に関するパラメータ、および自動車の周囲環境内にある障害物に基づいて、複数の運転危険度を計算するステップと、障害物が、自動車の進路上にあるか否かを特定するステップと、計算された運転危険度、および自動車の進路上の障害物の特定に基づいて、自動車のブレーキの作動に関する判定を行うステップとを含んでいる
(もっと読む)
車両用ブレーキ装置の制御装置
【課題】マスタシリンダ圧に加圧されるポンプアップ圧を発生させるポンプの容量を抑制しつつ、急減速の要求に対応できる車両用ブレーキ装置の制御装置を提供する。
【解決手段】マスタバックの倍力限界点までは、マスタシリンダ圧をホイールシリンダに供給し、前記倍力限界点以降は、ポンプによって発生させたポンプアップ圧のホイールシリンダに対する供給を制御することで、目標のホイールシリンダ圧が得られるようにする。ここで、非制動要求時で、マスタバックの負圧室の負圧が所定の負圧に達しておらず、前記倍力限界点が低下する条件の場合には、ポンプを駆動させて予めポンプアップ圧を発生させておくことで、ポンプ容量が比較的小さくても、倍力限界点以降においてポンプアップ圧による昇圧を応答良く行えるようにする。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。このドライバ状態係数Kは、自車両に先行車両の画像を撮影する撮像手段を備えておき、その撮像手段の撮影した先行車両の画像の面積の単位時間当たりの変化度合いから算出する。
(もっと読む)
車両の運動制御装置
【課題】操舵操作に基づいて急激なヨーイング挙動の発生を予測し、車両安定性制御における制動液圧の応答性を向上させることができる車両の運動制御装置を提供する。
【解決手段】車両のオーバステアを抑制する車両安定性制御を実行する車両運動制御装置において、操舵角に基づいて急激な車両のヨーイング挙動を予測し、適切な車輪の制動手段に対して予圧を付与する予圧制御を実行する。操舵角センサによって操舵角を検出し、検出された操舵角に基づいて操舵角速度を演算する。操舵角が増加するときに操舵の切り返し状態を判定し、切り返し操舵状態のときの操舵角速度が大きい場合に、オーバステアの程度に基づいて決定される予圧を付与する予圧制御を実行する。
(もっと読む)
車両の運動制御装置
【課題】操舵操作に基づいて急激なヨーイング挙動の発生を予測し、必要な場合に限って、車両安定性制御における制動液圧の応答性を向上させることができる車両の運動制御装置を提供する。
【解決手段】車両のオーバステアを抑制する車両安定性制御を実行する車両運動制御装置において、操舵角に基づいて急激な車両のヨーイング挙動を予測し、適切な車輪に備えられた制動手段に対する制御開始しきい値を調整する。操舵角センサによって操舵角を検出し、検出された操舵角に基づいて操舵角速度を演算する。操舵角が増加するときに操舵の切り返し状態を判定し、切り返し操舵状態のときの操舵角速度が大きい場合に、制動手段に対する制御開始しきい値が小さくなるように調整する。
(もっと読む)
ブレーキ液圧制御装置
【課題】安定した調圧精度で予圧を得ることができ、簡単な構成でコストを低減することができるブレーキ液圧制御装置を提供する。
【解決手段】レギュレータREからホイールシリンダHに至る流路に可変容量制御弁37を介して設けられ、可変容量制御弁37を通じて流路から作動液が流入した際に容積変化して作動液を貯溜可能な可変容量室を備え、可変容量室には、レギュレータREが閉弁された状態、かつ、吸入弁7および可変容量制御弁37が開弁された状態で、ポンプPが所定時間駆動されることにより作動液が流入するようになっており、可変容量室は、加圧された作動液の流入を許容することで出力液圧路における作動液圧を調圧することを特徴とする。
(もっと読む)
列車制御システム
【課題】推力指令に対する応答遅れを改善して、安全性を確保した上で、走行時間の短縮、運転本数の増大、輸送能力の増強などを達成する。
【解決手段】 自動列車運転装置6からブレーキ制御器5に零推力指令を与えて、VVVFインバータ3から励磁電流を出力させ、主電動機2を直ぐに動作可能な待機状態にさせるとともに、空制ブレーキ装置4に実トルクが生じない程度の空気圧(初込め圧)を与えて、直ぐに動作可能な待機状態にさせておき、自動列車運転装置6からブレーキ制御器5に引張力指令またはブレーキ力指令を含む推力指令が与えられたとき、主電動機2、空制ブレーキ装置4を直ぐに動作させる。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】制動装置全体の消費電力の増加を抑制しつつ、ブレーキロータ及びブレーキパッドの偏摩耗の発生を抑制できる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、路面判定処理を実行して車両の走行する路面の悪路指数を演算する(ステップS10)。そして、ECUは、ステップS10にて演算した悪路指数に基づき、車両の走行する路面が凹凸度合の比較的大きな悪路から凹凸度合の比較的小さな良路に変わったか否かを判定する(ステップS11)。この判定結果が肯定判定である場合、ECUは、路面が悪路から良路に変わったと判断し、モータを駆動させてホイールシリンダ内にブレーキ液を流入させる(ステップS13)。すると、各ブレーキパッドがブレーキロータに摺接する結果、ブレーキロータの各ブレーキパッドに対する傾斜が解消される。
(もっと読む)
1 - 20 / 27
[ Back to top ]