
Fターム[3D246JB48]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | フィードバック制御 (223) | P、I、D制御 (40)
Fターム[3D246JB48]に分類される特許
1 - 20 / 40
電動ブレーキ装置
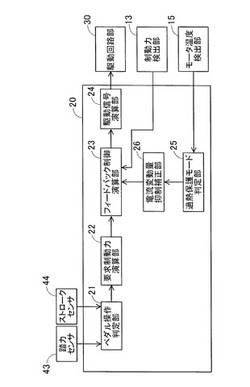
【課題】 制動力の低下を抑えつつ、モータコイルやモータブラシの過熱を抑制することが可能な電動ブレーキ装置を提供する。
【解決手段】 本発明の電動ブレーキ装置は、電動ブレーキアクチュエータ部が、車輪に生じる実制動力を検出する制動力検出部と、電動モータのモータ温度を検出するモータ温度検出部と、を有し、電気制御部が、ブレーキ操作量に基づいて要求制動力を演算する要求制動力演算部と、要求制動力に実制動力をフィードバックして制御制動力を演算するフィードバック制御演算部と、制御制動力に基づいて電動モータの駆動信号を生成する駆動信号演算部と、モータ温度検出部の検出結果に基づいて電動モータの過熱を抑える過熱保護モードに移行するか否かを判定する過熱保護モード判定部と、過熱保護モード判定部が過熱保護モードと判定したときに電動モータへ供給する電流の電流変動量を抑制する電流変動量抑制補正部と、を有する。
(もっと読む)
車両用ブレーキ装置

【課題】ブレーキ・バイ・ワイヤ形式のブレーキ装置において流路抵抗によってVSA装置などの液圧制御装置の機能が低下することを防止する。
【解決手段】ブレーキ装置1を、ブレーキペダル11の操作量Psに対応して液圧を発生するマスターシリンダ15と、マスターシリンダ15とホイールシリンダ2b・3bとの間に配置される電磁弁24a・24bと、電磁弁24a・24bよりもホイールシリンダ2b・3b側に設けられ、ブレーキ液圧を発生するモータ駆動シリンダ13と、モータ駆動シリンダ13とホイールシリンダ2b・3bとを結ぶ油路22e・22f上に設けられ、ホイールシリンダ2b・3bに供給されるブレーキ液圧を制御するVSA装置26とを有し、VSA装置26の動作時に、電磁弁24a・24bを開放した状態でモータ駆動シリンダ13を所定の目標加圧モータ角θatをもって加圧側に駆動する制御ユニット6をさらに有するようにする。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤシステムにおけるブレーキ力の増減時の応答性を簡単な構成で運転者の感覚に合うようにする。
【解決手段】ブレーキペダルのストロークを操作量として操作量制動力変換回路31に入力し、その出力信号を増加用ローパスフィルタ32と減少用ローパスフィルタ33とに入力し、各出力を最大値選択回路34により大きい方を選択し、各ローパスフィルタの出力の大きい方で制御目標値Bmaxを生成し、制御目標値Bmaxが最終的な制動力目標値となる。ブレーキ操作量に対する制動力目標値の応答遅れを、ブレーキ操作量の増加側では小さく、ブレーキ操作量の減少側では大きくすることができ、各ローパスフィルタのカットオフ周波数(時定数)を調整するという簡単な構成で、運転者に違和感の無いブレーキフィーリングを与えることができる。
(もっと読む)
運動量制御装置
【課題】 制御対象の運動状態が安定するように設定されたフィードバックゲインを用いて制御対象の運動量をフィードバック制御する運動量制御装置を提供すること。
【解決手段】 運動量制御装置は、複数のアクチュエータのうちの一つのアクチュエータを単独で作動させることにより制御対象の運動量をフィードバック制御した場合に用いる最適フィードバックゲインを、複数のアクチュエータのそれぞれが単独で作動した場合についてそれぞれ取得する最適フィードバックゲイン取得部と、最適フィードバックゲイン取得部により取得された複数の最適フィードバックゲインのうち最小のフィードバックゲインを制御系のフィードバックゲインとして設定するフィードバックゲイン設定部とを備える。
(もっと読む)
リニアソレノイドバルブの制御装置
【課題】リニアソレノイドバルブの制御装置における高応答性を実現するための初期駆動電流を正確に学習する制御を行う。
【解決手段】目標圧Paとブレーキ圧Paとの偏差δPに応じて油圧フィードバック制御器12により求めた油圧フィードバックデューティ比Dyfと、初期デューティ学習器16により、増圧用バルブ5の上下流の差圧ΔPに基づいて求めたバルブ初期特性による初期駆動量Dy0及び修正量ΔDyとにより、リニアソレノイドバルブからなる増圧用バルブ5を制御する駆動デューティ比Dyを決定する。リニアソレノイドバルブの安定動作時に初期駆動量を求め、その初期駆動量をフィードフォワード制御の指令値としてリニアソレノイドバルブを制御することができ、リニアソレノイドバルブが動き始めるための初期駆動量を確保した通電制御を行うことができる。
(もっと読む)
コンピュータプログラム及び数値計算装置
【課題】分布定数系の微分方程式を少ない演算量で解けるようにする。
【解決手段】全ての計算時刻について値が与えられる第1の変数と、初期値のみが与えられる第2の変数とで定義される被積分関数に関する積分演算をコンピュータで実行し、各計算時刻で使用する前記第2の変数の値を算出するために、以下の処理を実行する。まず、被積分関数を第2の変数について偏微分して求めた偏導関数を記憶装置から読み出す。各計算時刻では、初期値又は直前回の計算時刻に算出された第2の変数の値と、現計算時刻に与えられる第1の変数の値を、被積分関数と偏導関数にそれぞれ代入して現計算時刻における被積分関数の値と偏導関数の値をそれぞれ算出する。この後、算出された被積分関数の値を初期値とし、かつ、当該被積分関数の値に偏導関数の値を乗算して算出された値を傾きとする指数関数を用い、次回計算時刻に使用する第2の変数の値を算出する。
(もっと読む)
車両発進補助制御システム
【課題】運転者が違和感を覚えない車速での発進と発進後の車速を時間経過と共に運転者の意図する速さへと制御すること。
【解決手段】自車のいる路面の勾配を検出又は推定し、その勾配と発進からの経過時間又は運転者のアクセル操作からの経過時間とに応じて制動力制御による停車保持状態からの発進時の目標車速を設定し、その発進時に前記目標車速となるように動力源等の駆動装置や制動装置を制御して車速制御を行うこと。その目標車速については、降坂路で停車保持状態から発進させる場合、自重による加速度を抑える速さに設定すればよい。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ制御装置において、回生協調制御実行中に、マスタシリンダ内のブレーキ液圧の急激な変動を抑制して、減速度の急変を抑制し、運転者に与える違和感を小さくする。
【解決手段】入力ピストン32に連結されたブレーキペダルの操作に応じて、コントローラCによって電動モータ40を作動させ、入力ピストン32及びプライマリピストン10の位置に基づき、マスタシリンダ2内のブレーキ液圧を制御する。回生協調制御実行中に、プライマリピストン10の後退位置を制限してリザーバポート20が開かないようにする。これにより、回生制動の増大に伴うプライマリピストン10の後退により、リザーバポート20が開いてマスタシリンダ2内のブレーキ液圧が急激に変動するのを防止することができ、減速度の急変を抑制し、運転者に与える違和感を小さくすることができる。
(もっと読む)
電動ブレーキ装置
【課題】ブレーキペダルの操作量に応じた制動力を確保することができる電動ブレーキ装置を提供する。
【解決手段】 制動動作開始時にRAM31が記憶している剛性テーブルT0と制動間隔や制動時間等の制動状況などに伴い変化する電動キャリパ4の実際の剛性特性(位置対応の押付力特性)とが一致しない場合においても、1回の制動中に推力推定値が算出されるごとに、押付力指令値・回転位置対応特性(剛性テーブル)の更新を行うため、押付力指令値と発生押付力との偏差を低減することができ、換言すれば、電動キャリパ4の実際の剛性特性の状態に応じて押付力指令に対する追従性を確保することができる。
(もっと読む)
車両用左右駆動力調整装置の制御装置
【課題】二次電池の充電率にかかわらず、常に姿勢制御を行うと共に、減速による違和感のない姿勢制御を行う車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】姿勢制御を行うためのトルク差を演算し(ステップS1、S2)、二次電池の充電率の増減に応じて、電動AYCモータとブレーキ装置へのトルク差の配分率を変動させて(ステップS3〜S6)、配分されたトルク差により電動AYCモータ及びブレーキ装置を各々制御して、姿勢制御を行う(ステップS6〜14)。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ABS制御中に車両挙動制御を実行する場合に、ブレーキ液圧の急変を抑制し、ブレーキフィーリングを向上させることを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車両の旋回状態に基づいて制御対象車輪を加圧するのに必要な加圧液圧を算出する加圧液圧算出部121Aと、車両の旋回による横加速度を取得し、当該横加速度に基づいて制御対象車輪が存在する前後位置における左右の車輪に掛かる荷重比を算出する荷重比算出部121Bと、車両挙動制御の制御対象車輪と前後位置が同じで左右逆側の車輪の推定液圧を制御対象車輪の基本液圧とし、当該基本液圧を荷重比で補正した修正基本液圧を算出する修正基本液圧算出部121Cとを備え、アンチロックブレーキ制御中に車両挙動制御を実行する際には、修正基本液圧に加圧液圧を加算することで、目標液圧を算出するように構成される。
(もっと読む)
車両運動制御システム
【課題】菱形車輪配置車両の実用性を向上させる車両運動制御システムを提供する。
【解決手段】前輪12Fと後輪12Rとの少なくとも一方を転舵させる転舵装置を制御するための制御装置が有する制御部を、左輪14Lおよび右輪14Rのいずれか一方に目標とされる駆動力と目標とされる制動力との少なくとも一方を付与できない失陥が駆制動装置に生じた場合に、その失陥に起因して生じる車両のヨーイング(ヨーモ−メントMyaw)を抑制すべく、転舵輪12F,12Rとのうちの1以上のものの転舵量を制御するように構成する。それにより、失陥に起因して生じる車両のヨーイングと逆向きのヨーモーメントを発生させ、その失陥に起因するヨーイングを低減させることが可能とされている。つまり、本車両運動制御システムによれば、上記のような駆制動装置の失陥時においても、車両の直進性を確保することが可能である。
(もっと読む)
ブレーキ制御装置
【課題】車輪にかかる制動力の差を低減しつつ、ホイールシリンダへブレーキ液を供給するためのポンプを起動したときの突入電流の重なりを防ぐブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置100は、液圧回路中に設けられたポンプを介して、駆動に応じてホイールシリンダ6にブレーキ液を供給する複数のポンプと、ポンプを駆動することでホイールシリンダ6へのブレーキ液の供給を制御するとともに、複数のポンプによるブレーキ液の供給の応答性を比較する制御手段と、を備える。制御手段は、ポンプによるブレーキ液の供給の応答性にもとづいてモータの駆動の開始のタイミングを異ならせる。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
電気駆動車両
【課題】坂道において電気駆動車両の発進及び停止を行う時に機械式ブレーキと電動機の協調制御を行うことなく、後退することのない発進及び停止を実現する。
【解決手段】本発明の電気駆動車両は、車輪を制動あるいは駆動するための誘導モータと前記誘導モータを制御する電動機制御器と前記車輪を制動する機械式ブレーキを備え、前記車両が前記機械式ブレーキが作動していない状態で停止している時は前記電動機制御器が前記誘導モータの固定子に直流電圧または−1〜+1Hzの間にある周波数の交流電圧を印加し、前記車両を停止させるトルクを前記誘導モータに発生させて前記車両を停止状態で維持する。
(もっと読む)
車両制動装置
【課題】 制動距離を抑制することができる車両制動装置を提供すること。
【解決手段】 前後加速度と推定した摩擦係数とに基づいて目標ホイルシリンダ液圧を算出する目標ホイルシリンダ液圧算出手段と、車輪がロックしそうなときにホイルシリンダ液圧を減圧し、ホイルシリンダ液圧の減圧後に、目標ホイルシリンダ液圧となるようにホイルシリンダ液圧を増圧し、ホイルシリンダ液圧の増圧後に、目標スリップ率となるようにホイルシリンダ液圧を増減圧するホイルシリンダ液圧制御手段とを設けた。
(もっと読む)
電気自動車の車輪スリップ制御装置
【課題】電気自動車の減速走行時における駆動輪のロック傾向及びロック回復傾向を的確に判定して、駆動輪のロックを防止するようにした車輪スリップ制御装置を提供する。
【解決手段】車両ECU(24)は、駆動輪(16,18)の車輪回転速度(Vw)の変化率である車輪速度変化率(ΔVw)と、駆動輪(16,18)のスリップ率(Sw)とに基づき、駆動輪が(16,18)ロックする傾向にあると判定すると、電動機(6)をモータ作動させて電動機の(6)駆動トルクを駆動輪(16,18)に付与する一方、車輪速度変化率(ΔVw)とスリップ率(Sw)とに基づき、駆動輪(16,18)のロック傾向が解消しつつあると判定すると、電動機(6)を発電機作動させて電動機(6)の回生制動トルクを駆動輪(16,18)に付与する。
(もっと読む)
車両トレーラの揺れを安定化するための全体制御
【課題】トレーラ揺れ介入システム。トレーラ揺れ介入システムは、ブレーキをそれぞれ有する複数の車輪を有するトレーラと、トレーラを牽引する車両とを備える。車両は、車両の動作特性を検知するように構成される複数のセンサと、コントローラとを含む。
【解決手段】コントローラは、センサから検知された動作特性を受け取り、予想ヨーレートと検知ヨーレートとの差に基づいて誤差を確定し、この差に基づいて1つ又は複数のトレーラ車輪に非対称制動力を加え、予想ヨーレートと検知ヨーレートとの差の絶対値が減少しているときにトレーラ車輪に対称制動力を加える。
(もっと読む)
トレーラと牽引車両との間の測定距離を用いたトレーラの揺れ軽減方法及びシステム
【課題】車両の後端からトレーラまでの距離を直接且つ正確に測定し、トレーラの揺れ軽減を実施する電子制御ユニットに正確な測定値を提供することによって、トレーラの揺れを軽減する方法を提供する。
【解決手段】複数の車両特性を感知すること、車両の後端に位置付けられている少なくとも1つのセンサ44,46によって、車両10とトレーラ50との間の距離を感知すること、感知された距離に基づいてトレーラの振動作用を求めること、並びに振動作用に応答して、車両の少なくとも1つの車輪20にブレーキ力を加えることを含む。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
1 - 20 / 40
[ Back to top ]