
Fターム[3D246JB51]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | フィードフォワード制御(オープン制御) (61)
Fターム[3D246JB51]に分類される特許
1 - 20 / 61
車両運動制御装置及びサスペンション制御装置
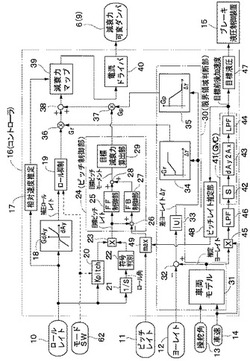
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
車両の制駆動力制御装置及び制駆動力制御方法

【課題】段差を通過して間もない位置に車両を停止する必要があっても、急な速度変化が発生することを抑制可能とすることを目的とする。
【解決手段】車両の制動力及び駆動力を制御して、取得した目標位置に車両を誘導または駐車する車両の制駆動力制御する際に、段差を通過する際に生じる目標位置に対する車両の相対速度の変動に応じて駆動力指令値を増大する。但し、上記段差を乗り越えるために、当該段差に接触した車輪の上方への変位である車輪の浮き上がりと判定すると、上記付加駆動力分の指令値が小さくなるように、上記駆動力指令値の上昇を抑制する。そして、駆動力指令値の抑制中に制動指令を制動装置に出力する。
(もっと読む)
車両用ブレーキ装置
【課題】フィードバック制御からフィードフォワード制御への切替え時に、ホイールシリンダ液圧が急に下がらないように制御して運転者がブレーキ操作時に違和感を感じないようにすること。
【解決手段】モータ回転数推定部132で、FB制御からFF制御への切替え時に、FB制御目標回転数よりも余裕回転数だけ高いFF制御目標回転数に応じて徐々に上がるモータ回転数を推定し、流量演算部133で、その推定モータ回転数に応じた液圧ポンプでの汲み上げ流量に応じて徐々に増加する液圧制御弁の通過流量を推定する。制御電流補正演算部134で、電気モータがFF制御目標回転数で回転されて液圧制御弁を通過するブレーキ液が漸増しても、ホイールシリンダ液圧が変化しないように、液圧制御弁に印加する制御電流を演算して制御する。
(もっと読む)
ブレーキ制御装置
【課題】 運転者に違和感を与えることなくブレーキペダル操作量に応じた制動力を得ることが可能なブレーキ制御装置を提供すること。
【解決手段】 本発明では、ブースタの倍力が無効とされる第1のストローク領域を備えた液圧制御装置に、第1のストローク領域ではドライバ要求制動力を実現するようにホイルシリンダ圧の液圧サーボを行い、第2のストローク領域では、ストローク量に対応して設定された目標ホイルシリンダ圧と目標マスタシリンダ圧との関係を維持するようにポンプや制御弁を制御することとした。
(もっと読む)
車両用ブレーキ装置
【課題】電動アクチュエータにより発生させるブレーキ力の応答性を、簡単な構成で、より一層高める。
【解決手段】ホイールシリンダにブレーキ液圧を与えるモータ駆動シリンダ13を、ブレーキ操作量に応じて求められた目標モータ角θtと実モータ角θmとの偏差Δθが大きい場合に弱め界磁制御を行って駆動制御する。電動アクチュエータの作動量として例えばモータ角(回転量)を用いる場合には公知の簡単かつ安価な回転センサ等で高精度な検出が可能であり、モータ角の変動レンジが広くなり、制動応答性を容易に高めることができる。また、負荷剛性の変動による影響を受けることが無く、弱め界磁制御の開始直後の過渡状態においてモータ角の偏差は生じており、弱め界磁制御を継続して実行することができ、モータの応答特性の変動が低減され、安定した応答特性が得られる。
(もっと読む)
車両の挙動制御装置
【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
ブレーキ・バイ・ワイヤシステムの初期化方法
【課題】本発明は、把握された道路条件を考慮して、タイムシーケンス(TS;Time Sequence)をおいて前輪のEWBと後輪のEMBを初期化することにより、初期化過程で全ての車輪のクランプ力の同時喪失を防止し、傾斜した道路でも運転手の車両統制権を維持することができるブレーキ・バイ・ワイヤシステムの初期化方法を提供する。
【解決手段】本発明は、左/右前輪にEWBをそろえ、左/右後輪にEMBをそろえたブレーキ・バイ・ワイヤシステムの初期化方法であって、初期化の遂行前に判断された道路条件に基づいて、時間差を持つように前記EWBの初期化と前記EMBの初期化の順序を決定し、初期化過程の間、初期化の遂行前に形成されている前記EWBと前記EMBのクランプ力が同時に解除されないようにするタイムシーケンス方式で具現される。
(もっと読む)
路面勾配推定装置、車両用制御装置、及び車両用制御システム
【課題】車両の走行速度(実車速V)の微分値ACCw及び自身に加わる力に基づき加速度を感知する加速度センサの検出値ACCgに基づき、車両の走行する路面の勾配を高精度に推定することが困難なこと。
【解決手段】微分値ACCw及び検出値ACCgの差として、第1推定値ACCrgが算出され、これに所定の補正がなされることで第2推定値ACCrgpが算出される。第2推定値ACCrgpにローパスフィルタB48にてフィルタ処理を施すことで、勾配推定値ACCrgfが算出される。第1推定値ACCrgと、ローパスフィルタB50によりこれにフィルタ処理を施した遅延推定値ACCrgLとの差に基づき、勾配変化推定値Δを算出する。ローパスフィルタB48のカットオフ周波数fcは、上記勾配変化推定値Δに応じて可変設定される。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】F/B演算部7での制御対象の選択について、各制御対象のアベイラビリティである最大制御量から各制御対象のF/F要求値を引いた差から各制御対象の余裕度を演算し、この余裕度に基づいて行うようにする。これにより、余裕度がF/B要求値よりも大きな制御対象を選択して車両横方向運動制御を実行することが可能となる。したがって、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
運動量制御装置
【課題】 制御対象の運動状態が安定するように設定されたフィードバックゲインを用いて制御対象の運動量をフィードバック制御する運動量制御装置を提供すること。
【解決手段】 運動量制御装置は、複数のアクチュエータのうちの一つのアクチュエータを単独で作動させることにより制御対象の運動量をフィードバック制御した場合に用いる最適フィードバックゲインを、複数のアクチュエータのそれぞれが単独で作動した場合についてそれぞれ取得する最適フィードバックゲイン取得部と、最適フィードバックゲイン取得部により取得された複数の最適フィードバックゲインのうち最小のフィードバックゲインを制御系のフィードバックゲインとして設定するフィードバックゲイン設定部とを備える。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】アベイラビリティ演算部5にて、アプリ情報に含まれるアプリケーションの要求に応じたアベイラビリティ変更や車両情報に応じたアベイラビリティ変更が行われるようにする。これにより、アプリケーションの要求や車両情報を反映して各制御対象のアベイラビリティを変更することが可能となり、より適切な制御対象を選択してアプリケーションの要求や車両情報に忠実な車両横方向運動制御を実行することが可能となる。
(もっと読む)
液圧ブレーキシステム
【課題】液圧ブレーキシステムの改良を図る。
【解決手段】共通通路62には、増圧リニア式制御弁70,後輪ブレーキシリンダ30,増圧ONOFF式制御弁72,前輪ブレーキシリンダ28が、この順に接続される。また、後輪ブレーキシリンダ30と増圧ONOFF式制御弁72との間に流れ制限装置122が設けられ、増圧ONOFF式制御弁72を経て共通通路62に供給された作動液が後輪ブレーキシリンダ30に供給され難くされている。その分、前輪ブレーキシリンダ30に供給され易くされるのであり、前輪ブレーキシリンダ30に大きな流量で作動液を供給することができる。
(もっと読む)
ブレーキ制御装置
【課題】車両の状態に応じたブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】本発明のブレーキ制御装置では、横加速度とヨーレイトとに基づいて各輪に対する制動力の配分量を算出する第1制動力配分算出部と、ロール挙動に基づいて各輪に対する制動力の配分量を算出する第2制動力配分算出部と、車両挙動に応じて前記第1制動力配分算出部による配分量と、前記第2制動力配分算出部による配分量とを選択して制動力配分制御を行うこととした。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則した軌跡になるよう操舵輪の舵角及び左右輪の前後力差を制御する。
【解決手段】運転者の操舵操作量に対する前輪の舵角の関係を変更する舵角可変装置14又はバイワイヤ式の操舵装置76を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S350、450)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための前輪の目標舵角を演算し(S500)、一方の後輪の目標付加制動力を演算する(S1050)。そして目標舵角に基づいて前輪の舵角を制御し(S600)、目標付加制動力に基づいて後輪の制動力を制御する(S1060〜1100)。
(もっと読む)
車両の制振制御装置
【課題】 通常の制振制御に復帰したときのハンチングの発生を抑制することで制振制御の実行頻度の向上を図ることが可能な車両の制振制御装置を提供すること。
【解決手段】 車体バネ上振動を抑制するような補正トルクに基づいて制駆動トルク発生手段に対し補正トルク指令値を出力するにあたり、補正トルクの振幅が所定振幅以上の状態が所定時間継続しているときは、通常時補正トルク指令値よりも小さな値のハンチング時補正トルク指令値を出力し、その後、補正トルクの振幅が所定振幅以下となる状態が第1の所定時間継続したときは、補正トルク指令値の出力をハンチング時補正トルク指令値から通常時補正トルク指令値に復帰させ、第1の所定時間が経過する前に補正トルクの振幅が所定振幅を超える状態が所定時間継続したときは、ハンチング時補正トルク指令値の出力を継続する。
(もっと読む)
制動制御装置
【課題】車両が停止する直前に車両の減速度を低下して車両の揺り戻しを抑える制御において、上り坂で車両がずり下がってしまう可能性を低減することを目的とする。
【解決手段】車両が上り勾配道路において減速した場合t2〜t3に、車両の減速に伴いゼロに近づくブレーキ要求車軸トルク65を算出して揺り戻しを低減する。またその後の開始タイミングt3において、ブレーキ要求車軸トルク65の初期値B0、最終値B1、および補正期間tdを決定し、当該開始タイミングt3から補正期間tdの間、ブレーキ要求車軸トルクを初期値B0から最終値B1まで低下させる。また、車輪速センサ7の検出信号に基づいて検出した車両の検出車速が最後に検出限界最小車速Vc以上だった限界時刻t3以前における検出車速の変化に基づいて、車両の実車速がゼロになる停止時刻t4を推定し、上記開始タイミングt3から当該停止時刻t4までの期間を補正期間tdとする。
(もっと読む)
ブレーキ装置
【課題】ブレーキ装置の電源電圧が低下した際に、そのフェールセーフ制御を効果的かつ低コストに実現する。
【解決手段】ブレーキECU200は、通常の制動制御状態においては開閉弁28,30を閉弁させつつモータ40,42を駆動し、調整弁46〜54の開度を調整することで、ポンプ32,36からマスタシリンダ14への作動液の供給を遮断しつつ、ポンプ32〜38から吐出された作動液のホイールシリンダ20への供給量を調整する。一方、ブレーキECU200は、電源電圧が開閉弁28,30の最低作動電圧よりも低い低電圧状態となった場合にもモータ40,42を駆動し、ポンプ32,36から吐出された作動液の一部がマスタシリンダ14へ供給されることを許容する。
(もっと読む)
ブレーキ力制御装置
【課題】逆入力に起因する増圧リニア制御弁の制御ハンチングの防止を図る。
【解決手段】ブレーキシリンダ液圧の変動が、ブレーキディスクの磨耗、ドラムの偏心に起因して生じる場合には、増圧リニア制御弁、減圧リニア制御弁への供給電流を抑制しても、ブレーキシリンダ液圧の変動は抑制されないことが多い。この場合に、不感帯幅を大きくすれば、増圧リニア制御弁、減圧リニア制御弁の作動間隔を長くすることができ、制御ハンチングを防止することができる。また、ブレーキシリンダ液圧の変動の状態を検出しつつ、不感帯幅を漸増させれば、不感帯幅を適正な大きさに変更することができる。
(もっと読む)
1 - 20 / 61
[ Back to top ]