
Fターム[3D246KA01]の内容
ブレーキシステム(制動力調整) (55,256) | 制御回路要素 (1,120) | フィルタ (128)
Fターム[3D246KA01]の下位に属するFターム
Fターム[3D246KA01]に分類される特許
1 - 20 / 52
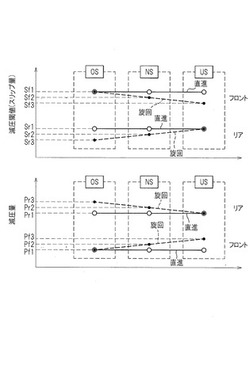
車両用ブレーキ液圧制御装置
【課題】走行ラインのトレース性を向上させることができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備える。アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、旋回判定手段によって車両が旋回していると判定された場合には、減圧閾値を直進時の減圧閾値Sf1,Sr1よりも減圧しやすい値Sf2,Sr2に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量Pf1,Pr1よりも大きな値Pf2,Pr2に変更する旋回減圧制御を実行する。
(もっと読む)
路面摩擦係数推定装置および車両用ブレーキ液圧制御装置

【課題】横加速度に基づく路面摩擦係数の推定を精度よく行うことを目的とする。
【解決手段】路面摩擦係数推定装置は、横加速度に基づいて第1の路面摩擦係数CF1を推定する第1の推定手段25と、前後加速度に基づいて第2の路面摩擦係数CF2を推定する第2の推定手段26と、路面摩擦係数CF1,CF2の小さい方を路面摩擦係数CFとする選択手段27を備える。選択手段27は、路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数CFとして選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数CFとして選択する。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
電動パーキングブレーキ装置
【課題】路面の勾配に応じた荷重の目標値を短時間で決定可能な電動パーキングブレーキ装置を提供する。
【解決手段】電動パーキングブレーキ装置は、パーキングブレーキと、アクチュエータと、勾配センサと、荷重センサと、制御部と、を有している。制御部は、アクチュエータ目標荷重値を決定する荷重値決定と荷重センサの出力に基づいてアクチュエータによる荷重がアクチュエータ目標荷重値まで到達するようにアクチュエータを制御する駆動制御とを行う。制御部は、荷重値決定において、勾配センサからの勾配値の時系列における変曲点を判定し、変曲点以降の勾配値の時系列と予め定められたフィルタ係数とに基づいて、勾配値の収束値を推定することにより推定勾配を算出するフィルタ処理を行い、推定勾配に基づいてアクチュエータ目標荷重値を決定する。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段2と、自車両の位置を取得する自車位置取得手段3と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段4と、を有し、車両運動制御演算手段4は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算し、前記前後加速度指令値は、自車両前方のカーブ走行時に発生するであろう最大横加速度推定値、自車両前方の道路勾配、ドライバのペダル操作、旋回方向のうちの少なくともいずれか一つに基づいて変化する。
(もっと読む)
車両用ブレーキ制御装置
【課題】EPBによる制動力によって車両のずり下がりを防止しつつ、過剰な制動力を発生させなくても済むようにする。
【解決手段】車速が0になって車両が停止したときに、ピッチングによりGセンサ21のGセンサ値が変動しても、その変動波形の振幅のーク値に沿って目標制動力が更新されるようにしている。これにより、Gセンサ値に基づいて設定される目標制動力をより路面勾配に対応する値に近づけることが可能となる。このため、EPBによる制動力によって車両のずり下がりを防止しつつ、過剰な制動力を発生させなくても済むようにできる。
(もっと読む)
車両およびその制御方法
【課題】TCS制御を行い、駆動ホイールのスリップ量が設定数値以下に落ちてTCS制御を終了する時点で、モータの出力トルクが急に増加して発生する駆動ホイールのスリップと駆動系の振動を減少させることができる車両およびその制御方法を提供する。
【解決手段】本発明の車両は、駆動ホイールへのトルク伝達用モータを制御するモータ制御器、および前記駆動ホイールが地面とスリップすると判断される場合には、TSC制御を行い、前記駆動ホイールに伝達される回転力を減少させ、前記駆動ホイールが地面とスリップしないようにし、スリップが発生しないと判断される場合には、TCS制御を解除し、前記モータから前記駆動ホイールに伝達されるモータトルクを設定されたラインを沿って徐々に増加させるTCS制御器、を含むことを特徴とする。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】緊急制動操作されていない場合に、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御が不用意に開始されることを抑制することができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVに外乱に基づく振動成分が含まれるか否かを判定する(ステップS74,S76)。そして、ブレーキ用ECUは、含まれると判定した場合に(ステップS74又はステップS76がYES)、第1の減速判定値DV_stを、含まれないと判定した場合よりも大きな値に補正し(ステップS79)、車体減速度DVが第1の減速判定値DV_stを超えると共に、Gセンサ値Gが第2の減速判定値G_stを超える場合に(ステップS84,S89:YES)、補助制御を開始する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車両が横転しそうなときの姿勢の安定性をより向上させる。
【解決手段】同一軸上に設けられた左右の車輪を個別に制動可能に構成され、旋回中に横転傾向が検知されると車輪を制動して横転抑制制御を実行する車両用ブレーキ液圧制御装置であって、横転抑制制御部120は、横転傾向が検知された場合に、旋回外輪に第1の制動力で制動を行うと同時に、同一軸上の旋回内輪に第1の制動力よりも小さい第2の制動力で制動を開始する。
(もっと読む)
車両の制御装置
【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
路面勾配推定装置、車両用制御装置、及び車両用制御システム
【課題】車両の走行速度(実車速V)の微分値ACCw及び自身に加わる力に基づき加速度を感知する加速度センサの検出値ACCgに基づき、車両の走行する路面の勾配を高精度に推定することが困難なこと。
【解決手段】微分値ACCw及び検出値ACCgの差として、第1推定値ACCrgが算出され、これに所定の補正がなされることで第2推定値ACCrgpが算出される。第2推定値ACCrgpにローパスフィルタB48にてフィルタ処理を施すことで、勾配推定値ACCrgfが算出される。第1推定値ACCrgと、ローパスフィルタB50によりこれにフィルタ処理を施した遅延推定値ACCrgLとの差に基づき、勾配変化推定値Δを算出する。ローパスフィルタB48のカットオフ周波数fcは、上記勾配変化推定値Δに応じて可変設定される。
(もっと読む)
車両用制御装置
【課題】実ヨーレートの急変の影響を受けることなく、実横加速度を適正に補正することができる車両用制御装置を提供することを目的とする。
【解決手段】車両用制御装置(制御部20)は、実ヨーレートYsの変化率が所定値以上か否かを判断する急変判定手段209と、舵角センサ92で検出する舵角量に基づいて規範ヨーレートYcを算出する規範ヨーレート演算手段202と、急変判定手段209によって変化率が所定値未満であると判断された場合には、実横加速度Gysを実ヨーレートYsに基づいて補正し、急変判定手段209によって変化率が所定値以上であると判断された場合には、実ヨーレートYsを規範ヨーレートYcに切り替えて実横加速度Gysを補正する補正手段220と、を備えている。
(もっと読む)
車両駐車支援制御装置及び車両駐車支援制御方法
【課題】自車両周囲の障害物に対する運転支援をより適切に実施可能な車両駐車支援制御技術を提供する。
【解決手段】自車両周囲の障害物との距離が予め設定した制御開始距離以下となったと判定すると、その制御開始距離以下となった障害物への自車両の接近を防止して運転者の運転を支援する運転支援制御を行う際に、自車両が駐車位置に向けて移動中と判定している場合、上記運転支援制御を抑制する。
(もっと読む)
路面状態推定方法
【課題】走行中の雪路を更に細分化して推定することのできる路面状態推定方法を提供する。
【解決手段】加速度センサー、路面温度計、及び、マイクロフォンにより、タイヤのタイヤ周方向振動、路面温度T、及び、タイヤ発生音をそれぞれ検出するとともに、タイヤの振動のデータから、踏み込み前領域R1の帯域値P11,P12,P13と、踏み込み領域R2の帯域値P21,P22,P23と、蹴り出し前領域R3の帯域値P31,P32,P33と、蹴り出し領域R4の帯域値P41,P42と、蹴り出し後領域R5の帯域値P51,P52,P53とを算出し、タイヤ発生音のデータから低周波帯域のバンドパワー値PAと高周波帯域のバンドパワー値PBとの比である音圧レベル比Q=(PA/PB)を演算し、帯域値Pijと、路面温度Tのデータと、音圧レベル比Qと、車輪速のデータとを用いて、路面状態を推定する。
(もっと読む)
自動列車運転装置
【課題】電気ブレーキと空気ブレーキとの配分に応じて複雑な調整を必要とせず、且つ外乱にも強い自動列車運転装置を提供する。
【解決手段】列車の速度を検出する速度検出部31と、列車の走行位置を演算する位置演算部32と、列車の目標速度を規定する速度パターン生成部33と、速度パターンと列車速度に基づきノッチ指令ntを生成するノッチ制御部34と、ノッチ指令ntに基づき列車速度を減少させる電気ブレーキ及び空気ブレーキからなるブレーキ装置35と、ブレーキ装置35が発生する減速力を推定する減速力推定部(ブレーキモデル)37a及び列車の減速度を演算する減速度演算部(車体逆モデル)37bを有しており、これら減速力及び減速度に基づき外乱τd^を推定する外乱推定器37とを備え、減速力推定部は、電気ブレーキと空気ブレーキの動作状態に応じてブレーキ装置35のパラメータを調整する。
(もっと読む)
道路形状検出装置、走行制御装置、及び道路形状検出方法
【課題】認識しているカーブ数のハンチングを抑制する。
【解決手段】各カーブ区間の入口補間点について、演算周期における前回の演算結果と比較し、カーブ区間数が変動しているか否かを判定し(ステップS5)、カーブ区間数が変動していたら、前回のカーブ情報と自車両の移動量とに基づいて、今回のカーブ情報を補正する(ステップS6)。先ず、カーブ区間が減少しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ増加させる。一方、カーブ区間が増加しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ減少させる。すなわち、今回のカーブ情報を、前回の配列に戻す補正を行うことで、前回のカーブ区間数を保持する(ステップS62)。
(もっと読む)
制御要求調停装置
【課題】設計効率の高い制御要求調停装置を提供する。
【解決手段】制御プラットフォーム10では、位置制御要求調停部21が、位置を次元とする複数の制御要求を調停して出力し、位置制御要求変換部22が、位置制御要求調停部21からの制御要求を速度を次元とする制御要求に変換して出力する。そして、速度制御要求調停部31が、速度を次元とする複数の制御要求を調停して出力し、速度制御要求変換部32が、速度制御要求調停部31からの制御要求を加速度を次元とする制御要求に変換して出力する。さらに、加速度制御要求調停部41が、加速度を次元とする複数の制御要求を調停して出力し、加速度制御要求変換部42が、加速度制御要求調停部41からの制御要求を加速度制御を実現する制御装置に応じた次元(例えばトルク)の制御要求に変換して出力する。
(もっと読む)
路面摩擦係数推定装置
【課題】車両の所定のヨー軸周りのモーメントの推定値を用いて路面の摩擦係数の推定を行う場合に、路面の摩擦係数の推定値の信頼性や安定性をさらに向上させる。
【解決手段】車両1のヨー軸周りの外力モーメントの第1推定値Mz_estm_kを求める手段(S102〜S116,S118−4)と、第2推定値Mz_sens_kを求める手段(S118−3)と、偏差(Mz_sens_k−Mz_estm_k)を“0”に収束させるように路面摩擦係数の推定値の増減操作量Δμ_kを決定する手段(S118−6)とから成る基本処理手段31_kを複数備え、Δμ_kに応じて路面摩擦係数の推定値を更新する。基本処理手段31_kのそれぞれに対応するヨー軸は互いに異なる位置に設定される。
(もっと読む)
車両挙動制御装置
【課題】非グリップ状態検出条件を最適に設定することで、適切な横滑り状態抑制制御を実現すること。
【解決手段】車両の好ましくない横滑り状態を抑制すべく横滑り状態抑制制御を行う車両挙動制御装置10において、車両状態量を換算して横加速度換算値を演算する横加速度換算値演算手段90,92と、実横加速度を検出する実横加速度検出手段36と、路面に対する車両の非グリップ状態を検出し、非グリップ状態が検出された場合に前記横滑り状態抑制制御の実行禁止状態から実行許可状態への切り替えを行う非グリップ状態検出手段94とを備え、前記非グリップ状態は、前記各手段から得られる横加速度換算値及び実横加速度が同一の車両旋回方向を表す正負の符号であり、且つ、横加速度換算値及び実横加速度の大きさがそれぞれの閾値より大きい場合を一条件として検出されることを特徴とする。
(もっと読む)
1 - 20 / 52
[ Back to top ]