
Fターム[3D246LA12]の内容
ブレーキシステム(制動力調整) (55,256) | 圧力回路及び要素 (7,929) | 最終制動装置 (493)
Fターム[3D246LA12]の下位に属するFターム
電動ブレーキ (98)
Fターム[3D246LA12]に分類される特許
1 - 20 / 395
車両のブレーキシステム用制御装置、車両用ブレーキシステムおよび車両のブレーキシステムを作動させる方法
【課題】ドライバーの通常の制動感を保証する。
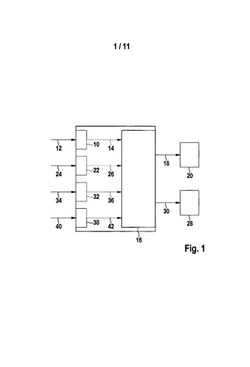
【解決手段】車両のブレーキシステムのための制御装置であって、供給されるブレーキ操作強度量14を受信可能な第1の受信機構10と、少なくとも前記受信したブレーキ操作強度量14を考慮して、プランジャ20の目標充填レベル量を設定可能とし、設定された前記目標充填レベル量に対応するプランジャ制御信号18を出力可能とし、その結果前記プランジャ20の貯留容積部に充填されている実液体体積と前記貯留容積部に最大で充填可能な最大体積との比率を、前記設定した目標充填レベル量に応じて調整可能とするプランジャ制御機構16とを備え、前記ブレーキ操作強度量14が所定の非操作強度量に対応しているときに、前記プランジャ20の空の状態とは異なる充填レベル量を目標充填レベル量として設定する。
(もっと読む)
車両用制動装置

【課題】ブレーキ操作部材が操作されていなくても、マスタ系統の失陥を検出することができる車両用制動装置を提供する。
【解決手段】本発明は、マスタピストン(14、15)が駆動されてマスタシリンダ圧を発生させる車両用制動装置において、ブレーキ液を蓄圧する蓄圧部(431)と、蓄圧部内のブレーキ液を使用して、ブレーキ操作部材の操作に関わらずサーボ圧を発生可能に構成されているサーボ圧発生部(4)と、蓄圧部内のブレーキ液の消費量に相関するブレーキ液消費量相関値を検出するブレーキ液消費量相関値検出手段(73、74、75)と、ブレーキ操作部材が操作されていない状態でサーボ圧発生部によりサーボ圧のみでマスタピストンを駆動させ、その際にブレーキ液消費量相関値検出手段により検出されているブレーキ液消費量相関値に基づいて、マスタ系統の失陥を検出する失陥検出手段(6)と、を備える。
(もっと読む)
車両用制動装置
【課題】機械式レギュレータの簡素化及び小型化が可能な車両用制動装置を提供する。
【解決手段】本発明の車両用制動装置は、高圧源のブレーキ液圧に基づいて、パイロット室に供給されるパイロット圧に応じた出力圧力を出力ポートから送出する機械式レギュレータ44と、パイロット室に接続された切替部45と、切替部を介してパイロット室に接続され、第1パイロット圧をパイロット室に供給する第1パイロット圧発生装置1と、切替部を介してパイロット室に接続され、第2パイロット圧をパイロット室に供給する第2パイロット圧発生装置41〜43と、機械式レギュレータの出力ポートから供給される出力圧力に基づいたブレーキ力を発生させるホイルシリンダ54と、を備え、切替部は、第1パイロット圧及び第2パイロット圧の何れか一方をパイロット室に供給することを特徴とする。
(もっと読む)
車両用制動装置
【課題】マスタ系統の失陥を検出でき、検出後のブレーキ力低下を抑制することができる車両用制動装置を提供する。
【解決手段】本発明の車両用制動装置は、ブレーキ操作部材の操作に伴って、ブレーキ操作部材の操作力のみによってマスタピストンを駆動させ、ブレーキ操作部材の操作量が所定量である場合又はブレーキ操作部材の操作力が所定力である場合における、マスタシリンダ圧に相関するマスタシリンダ圧相関値が所定値未満である場合に、マスタ系統の失陥を検出する失陥検出手段(6)と、失陥検出手段によりマスタ系統が失陥していることが検出されたブレーキ操作部材の操作において、ブレーキ操作部材の操作量が所定量よりも大きい場合又はブレーキ操作部材の操作力が所定力よりも大きい場合に、サーボ圧発生部で発生させたサーボ室内のサーボ圧に対応する力によってマスタピストンを駆動する駆動制御手段(4、6)と、を備える。
(もっと読む)
車両挙動制御装置
【課題】主処理装置が異常になっても、車両の挙動を安定的に制御する。
【解決手段】第1の処理装置10は、車両の利用者からの要求を入力する要求入力センサ2を含む複数のセンサ2、3からの複数の信号を含む第1の情報に基づいて、第1の制御量COM1を演算する。第2の処理装置20は、要求入力センサ2からの信号を含むが、第1の情報より情報量が少ない第2の情報に基づいて、第2の制御量COM2を演算する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH内であると判定されるとき、第1の制御量COM1に基づいて走行機器4を制御する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH外であると判定されるとき、車両の運動量が小さくなる制御量、または車両の運動量の変化が小さい制御量に基づいて走行機器4を制御する。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
車両のブレーキングを制御するための方法
【課題】ブレーキペダルの動作の妨害といったようなブレーキング異常に対処すること。
【解決手段】モータ車両100のブレーキングを制御するための方法であって、ブレーキングシステム140の油圧に関連した情報を受領し;ブレーキペダル表面190に対して印加された圧力に関連した情報を受領し;ブレーキングシステムの油圧とブレーキペダル表面圧力との間の、測定されたブレーキング関係を決定し;所定のブレーキング関係を取得し;測定されたブレーキング関係と所定のブレーキング関係とを比較し;測定されたブレーキング関係が所定のブレーキング関係とは相違するものである場合には、モータ車両の速度を低減し得るよう構成されたブレーキング補助手段を起動する。
(もっと読む)
制動力制御装置
【課題】目標減速度と実減速度に差が出る制動時、目標減速度に到達する応答性を向上すること。
【解決手段】ハイブリッド車の制動力制御装置は、ブレーキ操作に応じて車輪に付与するマスターシリンダ液圧を発生するブレーキ液圧発生装置1と、統合コントローラ9と、を備える。統合コントローラ9は、マスターシリンダ液圧が所定値より高く、目標減速度と実減速度の差が所定値以上の場合、マスターシリンダ液圧による制動力で不足する減速度の差分をアシスト液圧によるアシスト制動力で補うと共に、フロント側配分とリア側配分による制動力前後配分について、目標減速度と実減速度の差が所定値未満のときの定常時配分と比較してフロント側配分を上げる制御を行う(図3)。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ操作時、ペダルストロークに対するホイールシリンダ液圧特性の段付きとペダル反力の変動を小さく抑えることで、ペダルフィールの違和感を緩和すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、マスターシリンダ液圧センサ24と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、ブレーキ液を吸い込んで吐出する液圧ポンプ22によりポンプアップ液圧を発生する。マスターシリンダ液圧センサ24は、運転者によるブレーキ操作速度を検知する。ブレーキコントローラ7は、ブレーキ操作速度が所定値以上の場合、ポンプアップ液圧によりホイールシリンダ4FL,4FR,4RL,4RRへの液圧を所定値まで増加させる際、ペダルストロークがリザーバポートの閉鎖位置に達するまでのポンプアップ液圧増加速度よりも、ペダルストロークがリザーバポートの閉鎖位置を通過した後のポンプアップ液圧増加速度を遅くする(図3)。
(もっと読む)
ブレーキ制御装置及びブレーキ制御方法
【課題】ブレーキ距離の延伸を抑制すること。
【解決手段】時刻t2において滑走の発生を検知すると、排気制御を開始し(ブレーキ力の低下)、その後、時刻t3において粘着評価値が再給気開始条件を満たすと、給気を開始する(ブレーキ力の増加)。粘着評価値は、ブレーキ力相当値であるBC圧と、車輪の減速度とから求められる。
(もっと読む)
作業車両および作業車両の制御方法
【課題】ブレーキ装置における駆動力のロスを抑制することができると共に、オーバーヒートの発生を抑えることができる作業車両および作業車両の制御方法を提供することにある。
【解決手段】制御部7は、ブレーキ装置5a、5bが、制動状態である場合は、潤滑油の供給量を所定の第1供給量とし、ブレーキ装置が制動状態から非制動状態に切り替えられた場合には、回転部材の温度に基づいて潤滑油の供給量の第1供給量から第1供給量より少ない第2供給量への変更を判断する。また、制御部は、トランスミッション10の速度段が所定の高速速度段である場合には、第1制御を実行可能とし、トランスミッションの速度段が高速速度段より変速比が大きい低速速度段である場合には、回転部材の温度およびブレーキ装置の制動状態・非制動状態に関わらず所定量の潤滑油をブレーキ装置に供給する第2制御を行う。
(もっと読む)
車両用姿勢制御装置
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
制動制御装置
【課題】 ブレーキからの異音発生を防止すること。
【解決手段】 車両10が停止しているか否かを判定する停止判定部12と、ブレーキ操作部材30の制動操作量を測定する制動操作量測定部14と、ドラムブレーキ32へ供給される液圧を測定する液圧測定部16と、前記ドラムブレーキ32への所定圧以上の前記液圧をカットする液圧カット部18と、前記液圧カット部18の動作を制御する液圧カット制御部20とを備え、この液圧カット制御部20が、前記車両10の停止後で、前記制動操作量が所定値を超え、かつ、前記液圧が前記所定圧を超えた際に、前記液圧カット部18を動作させて前記所定圧以上の液圧をカットさせる停止時高圧抑制制御22を備えた。
(もっと読む)
車両の制動制御装置
【課題】車両の制動制御装置において、制動時における車両の挙動を安定させることで安全性の向上を可能とする。
【解決手段】ECU41として、車輪FR〜RLのスリップが抑制されるように制動装置22を作動制御するABS制御装置51と、車両11の周辺情報に基づいて制動装置22を作動制御する自動制動制御装置52と、ABS制御装置51の作動開始の閾値を自動制動制御装置52の非作動時より自動制動制御装置52の作動時の方が小さくなるように変更する作動開始閾値変更装置とを設ける。
(もっと読む)
車両用制動制御装置
【課題】ブレーキフィーリングの悪化を抑制する。
【解決手段】ブレーキペダル11の踏み込みが無効ストローク分に達したときに第1、第2差圧制御弁16、36の差圧量を保持せずに、その後もブレーキペダル11の踏み込みに応じて第1、第2差圧制御弁16、36の差圧量を大きくし、ポンプ加圧によってW/C圧の嵩上げを行う。このようにすれば、ポンプ加圧による嵩上げ分だけM/C圧を低下させることが可能となり、ブレーキペダル11がM/C13側に吸い込まれる量を小さくでき、M/C圧が低下してペダル反力が低下する量も小さくすることが可能になる。
(もっと読む)
鞍乗り型車両
【課題】他部材の配置等への影響を抑えてコンパクトにABSモジュールを配置すると共に、ABSモジュールに対する外乱の影響等を抑えることができる鞍乗り型車両を提供する。
【解決手段】メインフレーム15を上方から跨いで覆うように設けられる燃料タンク41を備え、ABSモジュール61は、その上方及び左右側方を燃料タンク41で覆われるように燃料タンク41の下方に配置され、燃料タンク41の下面には、ABSモジュール61を収容する凹部78が形成される。
(もっと読む)
車両の制御装置
【課題】エンジンのアイドリングストップを行う車両の坂路発進性をより好適に確保することのできる車両の制御装置を提供する。
【解決手段】エンジンのアイドリングストップに応じて行われるヒルホールド制御を、アイドリングストップからの復帰のためのエンジンの再始動指令がなされ(S101:YES)、かつエンジン回転速度が既定の判定値α以上である(S102:YES)ことを条件に解除する(S104)一方で、そうした条件が成立しても、エンジンがアイドリングストップによる停止の途上にあるときには(S103:YES)、ヒルホールド制御を解除しないようにした。
(もっと読む)
車両挙動制御システム
【課題】車両の挙動を安定化させることができる車両挙動制御システムを提供することを目的とする。
【解決手段】車両2の各車輪3に生じる制動力を個別に調節可能な制動装置7と、制動装置7を制御して車輪3のスリップ状態を制御するABS制御及び車両2の旋回状態を制御する旋回制御を実行可能な制御装置8とを備え、制御装置8は、ABS制御及び旋回制御の作動中に、車両2に作用する横方向加速度の絶対値が予め設定された所定加速度以下である場合に制動力の増加勾配を制限する一方、横方向加速度の絶対値が所定加速度より大きい場合に制動力の増加勾配を制限せず、さらに、制御装置8は、旋回制御における旋回制御量の絶対値が予め設定された所定制御量より大きい場合には制動力の増加勾配を制限しない。
(もっと読む)
車両停止判定装置
【課題】 精度良く車両停止状態を判断可能な車両停止判定装置を提供すること。
【解決手段】 本発明の車両停止判定装置にあっては、運転者の操作以外によってエンジンの停止・再始動が行われる動力源と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、前記車輪速検出手段により検出された従動輪車輪速が回転停止を第1所定時間以上継続し、かつ、駆動輪車輪速が回転停止を前記第1所定時間より長い第2所定時間以上継続したときは車両停止と判定する車両停止判定手段と、を備えた。
(もっと読む)
車両操作支援装置
【課題】障害物の移動状態に応じた車両の操作支援を実行可能な車両操作支援装置を提供すること。
【解決手段】自車に対する障害物を検知し、その検知結果を用いて少なくとも障害物と自車との相対速度及び相対距離を検出する障害物検知手段M1を備え、検出の結果に基づいて障害物に対する回避支援を行う車両操作支援装置Uにおいて、自車速度と相対速度と相対距離とに基づいて、障害物が回避支援の対象となるか否かを判定する回避支援対象判定手段M2を備え、相対速度が自車速度と略等しい場合に、障害物を、少なくとも車両進行方向に移動していない停止障害物であると判定し、相対速度が自車速度と異なる場合にて、相対速度と相対距離とに基づいて算出した衝突余裕時間の単位時間当たりの減少量が所定の減少量以上の場合は、障害物を急接近障害物と判定し、所定の減少量未満の場合は、障害物をその他の障害物と判定する。
(もっと読む)
1 - 20 / 395
[ Back to top ]