
Fターム[3D246MA37]の内容
ブレーキシステム(制動力調整) (55,256) | 安全装置 (1,468) | 作動報知 (418) | 運転者、同乗者に報知するもの (381)
Fターム[3D246MA37]に分類される特許
1 - 20 / 381
車輌停止前後のペダル作動状態に基づき自動制動の解除を判断する車輌
車両の緊急制動制御装置及びその方法
衝突被害軽減装置
車両用制動装置
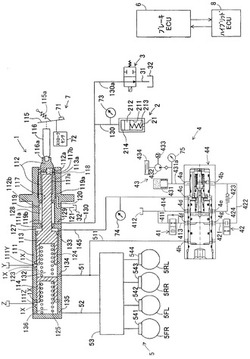
【課題】マスタ系統の失陥を検出でき、検出後のブレーキ力低下を抑制することができる車両用制動装置を提供する。
【解決手段】本発明の車両用制動装置は、ブレーキ操作部材の操作に伴って、ブレーキ操作部材の操作力のみによってマスタピストンを駆動させ、ブレーキ操作部材の操作量が所定量である場合又はブレーキ操作部材の操作力が所定力である場合における、マスタシリンダ圧に相関するマスタシリンダ圧相関値が所定値未満である場合に、マスタ系統の失陥を検出する失陥検出手段(6)と、失陥検出手段によりマスタ系統が失陥していることが検出されたブレーキ操作部材の操作において、ブレーキ操作部材の操作量が所定量よりも大きい場合又はブレーキ操作部材の操作力が所定力よりも大きい場合に、サーボ圧発生部で発生させたサーボ室内のサーボ圧に対応する力によってマスタピストンを駆動する駆動制御手段(4、6)と、を備える。
(もっと読む)
車両減速度制御装置

【課題】フェード現象やヴェイパーロック現象を抑制しつつ、ドライバに対して減速すべき状況であることを知らせることができる車両減速度制御装置を提供すること。
【解決手段】ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、エンジンブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置100であって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定し(S10,S11)、減速を開始するタイミングであると判定された場合に、エンジンブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う(S13)。
(もっと読む)
車両の危険回避支援装置
【課題】自車両の前方の他車両における急ブレーキ操作を早期に検出し、車両の運転者による危険回避操作の支援を行なうことができるようにした、車両の危険回避支援装置を提供する。
【解決手段】
他車両2の位置情報と、他車両2のブレーキ操作情報とを含む他車両2の情報を検出する他車両情報検出手段14と、車両1の運転者による危険回避操作を支援する危険回避支援手段18,19とを備え、自車位置情報検出手段13及び他車両情報検出手段14からの情報に基づいて、車両1の前方に他車両2がいることが検出された場合、少なくとも他車両2において急ブレーキ操作がされていることを含む危険回避支援条件が成立したら、危険回避支援手段18,19により危険回避操作を支援する危険回避支援制御手段を備える。
(もっと読む)
車両の走行制御方法及び走行制御装置
【課題】衝突回避制御に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、運転者による車両1の操舵に対応する衝突回避軌道を選択し、選択した衝突回避軌道に基づいて走行するように車両1を制御する。これにより、衝突回避制御によって運転者が行っている車両操作、換言すれば運転者の反応が妨げられ、衝突回避制御に対し運転者が違和感を感じることを防止できる。
(もっと読む)
車両盗難防止制御装置
【課題】車外からの指令に基づいて安全に車両を停止させられる車両盗難防止制御装置を提供する。
【解決手段】車外からの外部停車要求が出されると、それに基づいて車両を停止させる。そして、車両を停止させる際に、所定の減速度、具体的には一定の基準減速度で停止させるようにする。このように、一定の基準減速度で車両を停止することで、急停車させたりすることなく安全に車両を停止させることが可能となる。
(もっと読む)
車体挙動安定化装置
【課題】制動制御装置および駆動制御装置を用いた車体挙動安定化装置において、車体挙動安定化制御用のアクチュエータが異常となったときに車体挙動を安定化させる。
【解決手段】モータ・ジェネレータ5および/またはエンジン8の駆動力を制御することで第1の車体挙動安定化制御を実行する駆動制御指令部36と、ブレーキアクチュエータ12c〜12fを駆動制御して前後左右の車輪2・3の制動力を独立制御することで第2の車体挙動安定化制御を実行する制動制御部35と、ブレーキアクチュエータの異常を検出する異常検出部37とを備えた車体挙動安定化装置1において、異常検出部37がブレーキアクチュエータの異常を検出した場合、制動制御部35が2の車体挙動安定化制御を停止するとともに、駆動制御指令部36に対して車体挙動安定化制御の実行指令を出力し、駆動制御指令部36が単独で第1の車体挙動安定化制御を実行するようにする。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
車両制御装置、および車両制御プログラム
【課題】車両の危険状態を抑制するための車両制御装置において、運転者がアクセルとブレーキとを踏み間違えたときに、車速が大きくなる前に危険状態を抑制できるようにする。
【解決手段】誤操作防止システムを構成する制御部は、アクセルの操作量の情報を示すアクセル情報を繰り返し取得し、アクセル情報に基づいて、アクセルの操作量が、予め設定された減少判定時間以内に減少閾値以上減少し、その後、予め設定された増加判定時間以内に増加した場合、運転者がアクセルとブレーキとを踏み間違えたものと判断する(S150、S160)。そして、踏み間違いと判断された場合、当該車両の加速を抑制する(S290)。このシステムによれば、アクセルの操作量が減少後に増加すれば直ちに当該車両の加速を抑制することができるので、車速が大きくなる前に加速を抑制することができる。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
異常時対応運転制御の要否判定方法および異常時対応運転制御の要否判定に基づく運転制御装置
【課題】運転者の体調に異常があるときに実行する異常時対応運転制御の要否を的確に判定する方法を提供し、また該判定を異常時対応運転制御の的確な始動+に生かす。。
【解決手段】運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせる。押圧力としては、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された押圧力を使用する。運転者による異常時対応運転制御の始動は、上記の要否判定が要と判定されたとき許可する。
(もっと読む)
車両用運転操作支援装置
【課題】車両を減速させる運転操作支援の制御において違和感が生じることなく運転操作支援を行う。
【解決手段】ナビゲーション装置3からの道路情報に基づいて進路上にカーブが有る場合に、カーブ開始位置の目標地点の目標速度まで減速させるための高低2つの減速ラインを設定し、車速の高低に応じていずれか一方の減速ラインで減速させるために車速が減速ラインを超えていたらナビゲーション装置や画面表示可能な装置で減速の表示を行い、さらにアクセル反力を発生させたり、ブレーキによる制動を行ったりし、かつ目標地点近傍にそれらの制御を解除する不感帯を設ける。目標地点に近付いて複数の減速ライン間が狭まることにより、隣接する減速ラインを交互に制御の基準として異なる種類の制御が行われることによる運転者に与えてしまう違和感を防止し得る。
(もっと読む)
アイドリングストップシステムおよびアイドリングストップの方法
【課題】アイドリングストップからのエンジン再始動時に各種ECUの誤動作を抑制し、エンジンの再始動を円滑に行う。
【解決手段】本発明に関わるアイドリングストップシステムは、車両1の走行停止状態において原動機4を停止および再始動するアイドリングストップシステムであって、ブレーキペダルp2の操作によって発生した制動力を少なくとも一時的に保持する制動力保持制御を実行する制動制御装置6と、ブレーキペダルp2の操作中において、所定の再始動条件が成立した際に停止中の原動機4を再始動する原動機制御装置4Eと、原動機4の再始動に先立って原動機制御装置4Eおよび制動制御装置6以外の少なくとも一つの車両制御デバイス8、9、6、10、11への通電あるいはその診断を一時的に停止する消費電力低減手段4E、8、9、6、10、11とを備えている。
(もっと読む)
制動機構の作動状態判定装置
【課題】固着の発生した制動機構の作動状態を速やかに判定し、判定した作動状態を報知する制動機構の作動状態判定装置を提供する。
【解決手段】作動状態判定装置20の電子制御ユニット21は、ブレーキペダルストローク量検出センサ22によって検出されたブレーキペダルストローク量Hbとブレーキ液圧検出センサ23によって検出されたブレーキ液圧Pbとを入力する。そして、ユニット21は、入力したストローク量Hb及びブレーキ液圧Pbが、運転者によるブレーキペダルBの操作に伴って摩擦パッド13が固着の発生した状態によりディスクロータ11の摩擦面に変位する状況に応じて区画された固着領域に含まれるか否かを判定する。この判定により、ストローク量Hb及びブレーキ液圧Pbが固着領域に含まれるときは、ユニット21は、報知装置24を介して運転者に固着の発生した作動状態を報知する。
(もっと読む)
車両制御装置、車両制御方法及びプログラム
【課題】自車両が障害物と衝突した場合の被害ができるだけ少なくなるように自車両を制御する。
【解決手段】障害物検出部11は、自車両と衝突する可能性がある障害物を検出する。回避可否判定部15は、障害物検出部11によって障害物が検出された場合に、自車両の進行を制御することで障害物との衝突を回避できるか否かを判定する。衝突範囲特定部16は、回避可否判定部15によって障害物との衝突を回避できないと判定された場合に、障害物における自車両と衝突しうる範囲を特定する。最小被害部位特定部17は、衝突範囲特定部16が特定した範囲のうち、自車両と衝突した場合に障害物に生じる被害が最も小さい部位を特定する。進行制御部18は、回避可否判定部15によって障害物との衝突を回避できないと判定された場合に、最小被害部位特定部17が特定した部位に変形が及ぶように自車両の進行を制御する。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
衝突回避装置
【課題】ユーザーが煩わしさを感じることのないPCS制御を行うことのできる衝突回避装置を提供する。
【解決手段】検出手段と、検出された物体を衝突判断対象物とし、当該衝突判断対象物と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断対象物と自車両との衝突を回避するための衝突回避制御を行う制御手段と、衝突回避制御を解除する解除手段と、自車両の位置を示す情報および自車両の車両情報の少なくとも一方の情報を取得する車両情報取得手段と、衝突回避制御の態様を変更する変更手段と、解除手段によって衝突回避制御が解除されたときの自車両の位置を示す情報を解除時位置情報として、解除手段によって衝突回避制御が解除されるときの自車両の車両情報を解除時車両情報として車両情報取得手段から少なくとも一方を取得し記憶する記憶手段とを備える。
(もっと読む)
ハイブリッド車両の回生制動制御装置
【課題】バッテリ入力限界値の制約にかかわらず回生制動の分担割合を最大にして、回生制動による燃費向上を最大限に享受する。
【解決手段】自動走行中、車速VSPを(a)のごとくt1〜t2間において低下させる減速要求があった時でも、(b)のごとくt1よりも前のt0に回生制動を開始させる。つまり、自車前方情報から設定した停車目標位置、および、自車の走行情報から、車速VSPを運転者が設定した目標車両減速度で規定車速まで低下させるのに必要な要求制動エネルギーを算出し、この要求制動エネルギーを回生制動のみで発生させる場合に必要な回生制動開始位置を演算し、この回生制動開始位置に到達したt0より回生制動を行わせる。よって先読み分だけ要求制動力エネルギーを小さな回生制動力Trで発生させ得て、摩擦制動に頼らず回生制動のみにより要求制動エネルギーを発生させ得て、エネルギー回収率(燃費)を改善することができる。
(もっと読む)
1 - 20 / 381
[ Back to top ]