
Fターム[3D301AA44]の内容
Fターム[3D301AA44]に分類される特許
1 - 20 / 46
スタビライザ装置
【課題】 消費動力を低減することができ、アクチュエータの小型化が可能なスタビライザ装置を提供する。
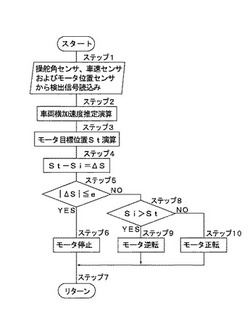
【解決手段】 コントローラ20は、操舵角センサ21で検出した操舵角と車速センサ22で検出した車速とに基づいて、走行車両に働く横加速度を推定演算して予測する。予測された横加速度に基づきFF制御にてモータ目標位置Stを演算する。モータ位置センサ23により検出した電動モータ19の現在位置Siとモータ目標位置Stとの偏差ΔSが不感帯の閾値eの範囲内となるように、電動モータ19の回転位置を制御する。これにより、コントローラ20は、車体が次の挙動を開始する前に可変剛性部4を目標剛性にする制御を開始する目標剛性制御手段を実現するものである。
(もっと読む)
サスペンション装置

【課題】前後方向入力に対するコンプライアンスステアを適正に調整可能な機構を提供する。
【解決手段】前側ロアリンク4に後側ロアリンク5に向けて張り出す張出部7を設け、その張出部7と後側ロアリンクを、内側ブッシュ21と外側ブッシュ20で連結する。後側ロアリンク5の中心を通る仮想の基準線Hに対する、内側ブッシュ21と外側ブッシュ20との距離を等しく設定すると共に、内側ブッシュ21よりも外側ブッシュ20を車両前後方向後方に配置する。上記内側ブッシュ21の上下方向剛性の方が外側ブッシュ20の上下方向剛性よりも高く設定する。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】車体の姿勢変化抑制と共に車両の旋回性能を考慮した目標減衰力を設定して、乗心地を向上させる減衰力可変ダンパを提供する。
【解決手段】車体と車輪との間の相対振動の減衰に供される減衰力可変ダンパの制御装置90であって、車体の運動状態に基づき、目標減衰力ベース値を設定する姿勢制御目標減衰値設定部56と、各車輪の横滑り状態を検出するUS/OS/CS判定部64と、US/OS/CS判定部64の判定結果に基づき、減衰力補正値を設定する補正値設定部66と、目標減衰力ベース値に減衰力補正値を加算することにより目標減衰力を算出する制御目標減衰値設定部70とを備えたことを特徴とする。
(もっと読む)
スタビライザ装置
【課題】スタビライザ装置において、ロール剛性を可変とする。
【解決手段】バー側連結部250において、板状部材252がスタビライザバー12に相対移動不能に固定され、軸状部材254がスタビライザリンク16に相対移動不能に固定され、これら板状部材252と軸状部材254との間に弾性部材256、258が設けられる。弾性部材256,258の外周面には、それぞれ、環状の溝部260,262が形成される。車両のローリングにより、板状部材252と軸状部材254とが相対移動させられると、それに伴って弾性部材256、258の一方が弾性変形させられる。弾性変形量が設定変形量に達すると、溝部260,262の一方が潰れ、自由表面280の面積が小さくなり、ばね定数が大きくなる。それによって、車両のサスペンションのロール剛性が大きくなる。このように、簡単な構造でロール剛性を可変にすることができる。
(もっと読む)
車両の運動制御装置
【課題】過渡操舵(レーンチェンジ挙動)が行われる場合において、運転者へ違和感を与えることなくステア特性制御を確実に実行して車両の安定性を確保すること。
【解決手段】直進状態から、一旋回方向側において急激なステアリングホイールの切り込み・切り戻し操作(第1操舵)が行われ、その後に連続して他旋回方向側においてステアリングホイールの切り込み・切り戻し操作(第2操舵)が行われる場合を想定する。第1操舵中は第1演算特性MP1に基づいてステア特性が調整され、第2操舵中は第2演算特性MP2に基づいてステア特性が調整される。第1操舵中において旋回変化量dJr(操舵角速度)が所定値を超えたとき、第2演算特性MP2がよりアンダステア側の特性に直ちに修正される。即ち、第1操舵に連続する第2操舵が開始される前にて、第2操舵に対応するステア特性制御の目標特性がよりアンダステア側の特性に予め修正される。
(もっと読む)
車両のアンダーステア抑制装置及びアンダーステア抑制方法
【課題】アンダーステア傾向をより抑制可能な技術を提供することを目的とする。
【解決手段】車両がアンダーステア傾向と判定すると、基準US修正モーメント量Mθの大きさに応じて次の順番に段階的に制御が実行される。すなわち、まず車両ロールモーメントの前後配分を後輪1RL、1RR側寄りに変更する。次に、車両ロールモーメントの前後配分を後輪1RL、1RR側寄りに変更した状態を維持したまま、後輪1RL、1RRの旋回内輪に制動力を発生若しくは当該旋回内輪に発生している制動力を増大する。更に、上記制動状態を維持したまま、上記後輪1RL、1RR側寄りに変更した車両ロールモーメントの前後配分を前輪側寄りに再変更する。
(もっと読む)
操舵制御車両
【課題】操舵制御手段が制御不能となった場合に車両挙動をより安定化させる。
【解決手段】自動車Vは、左右後輪3rに設けられた後輪トー角可変機構6と、左右前輪3fと左右後輪3rに設けられた減衰力可変ダンパ4およびスタビライザ8とを有する。ECU20は、故障検出部34によって左右両方の後輪トー角可変機構6に故障が検出された場合(ステップS5:Yes)、前輪3のダンパ4rの目標減衰力を大きく補正するとともに(ステップS6)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。また、ECU20は、故障検出部34によって左右どちらかの後輪トー角可変機構6に故障が検出された場合(ステップS5:No)、故障した側の後輪3rの目標減衰力を小さく設定するとともに(ステップS11,S13)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。
(もっと読む)
車両の後輪操舵制御装置
【課題】アクティブサスペンション装置の制御失陥により車両がロール方向に傾いた状態に保持されたときに車両が直進するように後輪を操舵する制御装置を提供する。
【解決手段】車輪を車体に懸架するサスペンション7をアクチュエータで駆動するアクティブサスペンション装置が設けられた車両の左右後輪を操舵制御する後輪操舵制御装置である。この装置は、車両の運動状態量を検出する状態量検出手段17,18,19を備えている。そして、アクティブサスペンション装置の制御失陥により車両がロール方向に傾いた状態に保持されたとき、検出された前記運動状態量に基づいてロール角を算出し、このロール角に応じて車両が直進するように後輪を操舵するように構成する。
(もっと読む)
車両のローリング挙動制御装置
【課題】構成物の横変位により操舵時のローリング挙動を抑制する際、横変位の反作用によって、操舵に伴うローリング挙動が許容限界を超えることのないようにする。
【解決手段】ローリング制御用可動構成物の横変位量制御が開始されたとき、先ず車両状態検出部21で操舵角θ、車輪速ω、ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φを検出する。次に、可動構成物変位量目標値算出部22で、上記の操舵角θおよび車輪速ωを用い、操舵周波数が高いほど小さくなるような可動構成物のローリング挙動変化抑制用目標横変位量を演算する。その後可動構成物駆動部23で、上記可動構成物の目標横変位量と、上記ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φとから、可動構成物の目標横変位量を実現するのに必要なモータ駆動トルク指令値を算出し、これをモータ用サーボドライバへ出力する。
(もっと読む)
車両挙動制御装置
【課題】高速旋回走行時など、車輪の接地荷重が増大した場合にも円滑な操舵制御を実現するための車両挙動制御装置を提供する。
【解決手段】ECU20は、ステップS2で後輪目標舵角δrrtと後輪実舵角δrrrとの差Δδrrが異常判定閾値δthを超えたか否かを判定し、この判定がYesになると、ステップS3で横Gセンサ12から入力した横加速度Gyが加速度判定閾値Gythを超えたか否か、すなわち後輪操舵アクチュエータ8rが作動遅れが右後輪3rrの接地荷重の増大によって引き起こされたか否かを判定する。ステップ3での判定がYesであった場合、ECU20は、ステップS4で接地荷重低減指令を減衰力制御部22の減衰力補正部32に出力し、後輪3rのダンパ4rの目標減衰力を低下させるように補正する。
(もっと読む)
デュアル空気ばね構成の速度依存型制御
【課題】 デュアル空気ばね構成の速度依存型制御を提供する。
【解決手段】 エアサスペンションシステムが、車両速度に応じて車両の望ましい乗り心地レベルを維持するように構成される。エアサスペンションシステムは、ピストンエアバッグと、ピストンエアバッグの周囲に装着された主エアバッグとを各々が含む複数の空気ばねアセンブリを含む。第1の空気ばねアセンブリセットが、第1のライドレートに調整され、第2の空気ばねアセンブリセットが、第2のライドレートに調整される。低車両速度条件下で、第1のライドレートと第2のライドレートとの間の第1の所定のライドレート差を維持し、高車両速度条件下で、第1のライドレートと第2のライドレートとの間の第2の所定のライドレート差を維持するために、第1および第2の空気ばねセット内の圧力が連続的に変更される。
(もっと読む)
プレビュー情報に基づいて運転支援の態様を変更する車輌
【課題】車輌運転支援装置に内在する作動遅れに相当する車輌走行距離以上に車輌より前方の位置にある走行経路の状況を事前に知ることにより、車輌がその位置に至ったときその走行経路状況により適した運転性能を有するように車輌運転支援の態様を先行制御する。
【解決手段】走行経路に沿って走行中の車輌の現在位置より走行経路に沿った前方の位置にある走行経路状況が第一と第二の状況の間に異なることに対応させて車輌の運転支援制御の態様を第一と第二の異なる態様の間で変更する。
(もっと読む)
サスペンションの制御装置及び制御方法
【課題】運転者が要求する操縦安定性とその他の乗員が要求する乗り心地との両立を図る。
【解決手段】車体と各車輪との相対運動を抑制する減衰力を増減可能なダンパが設けられたサスペンションの制御装置において、車体の運動状態に基づいて目標減衰力を設定するスカイフック制御ベース値設定部61と、操作スイッチ15による乗員の指示操作、及び乗員の乗車状態を判別する乗車状態判別部67での判別結果の少なくとも一方に基づいて、操縦安定性及び乗り心地の要求度合いに関する車両特性を設定する車両特性設定部63と、この車両特性設定手段により設定された車両特性に応じて、減衰力設定手段により設定された目標減衰力を、車輪の各々に設けられたダンパごとに補正する減衰力補正部64と、を備えたものとする。
(もっと読む)
車両用減衰力制御装置
【課題】ロール振動及びピッチ振動が瞬間的に発生する事象下において、ドライバの快適性を向上させることが可能な車両用減衰力制御装置を提供する。
【解決手段】車両用減衰力制御装置1では、車両が路上の突起等に進入してロール振動が発生した場合に、後輪側のショックアブソーバ12RL,12RRの減衰力に対する前輪側のショックアブソーバ12FL,12FRの減衰配分を通常状態よりも大きくすることで、ロール振動が効果的に抑えられる。ドライバの感受性は、ピッチ振動よりもロール振動に対して敏感であるので、突起進入時に瞬間的に発生するロール振動を抑えることで、ドライバの快適性を向上できる。
(もっと読む)
自動車サスペンションシステム
【課題】この発明は、ロール強度とロールモーメント分布を荷重に応じて変化させる自動車のサスペンションシステムを提供することを目的とする。
【解決手段】自動車の自動車サスペンションシステムのロール強度とロールモーメント分布をコントロールする方法と、その方法による自動車のサスペンションシステムであって、自動車と自動車が支持する荷重を支承するフロント側とリア側の自動車支持手段及び前記自動車サスペンションシステムに対し可変のロール強度を与える少なくとも一つのロールモーメント作用手段を含み;自動車の少なくともリア側又はフロント側で支持する荷重に応じて、前記自動車のサスペンションシステムのロール強度とロールモーメント分布を調整する構成を含んでいる。
(もっと読む)
車両用ロール抑制システム
【課題】実用性の高い車両用ロール抑制システムを提供する。
【解決手段】モータ力に依拠してロール抑制力を制御可能に発生させるロール抑制装置が前輪側と後輪側とに対応して1対設けられたシステムにおいて、1対のロール抑制装置に対応して設けられた前輪側バッテリ27Fおよび後輪側バッテリ27Rと、前輪側バッテリから前輪側ロール抑制装置の有する電磁モータ60Fへの電力供給のための前輪側電力供給線98F、および、後輪側バッテリから後輪側ロール抑制装置の有する電磁モータ60Rへの電力供給のための後輪側電力供給線98Rとを備え、供給線接続装置100,102によって2本の電力供給線を電気的に接続可能に構成される。このような構成のシステムによれば、電磁モータに供給すべき電力が不足しても、1対のロール抑制装置の一方が発生させるロール抑制力を大きくし、車両の旋回特性の適切化を図ることができる。
(もっと読む)
サスペンション設計支援装置およびサスペンション設計方法
【課題】好適にサスペンションモデルにおけるパラメータを設定する。
【解決手段】サスペンション設計支援装置10は、記憶部20に格納されたサスペンションモデルに対して所定のパラメータを規定することにより、所定のサスペンション特性を有するサスペンションモデルを構築する。ベアリング剛性演算部12は、サスペンションモデルにおけるベアリング剛性を調整することにより、トー剛性およびキャンバ変化が所定の特性となるよう演算する。車軸方向演算部18は、ベアリング剛性演算部12による演算の後に、サスペンションモデルにおける車軸の方向を調整することにより、イニシャルトーおよびイニシャルキャンバが所定の特性となるよう演算する。
(もっと読む)
運転支援装置
【課題】車両の走行状況に適した運転方法を運転者が容易に把握することができる運転支援装置を提供する。
【解決手段】運転者が車両を運転する運転方法によって特徴づけられる運転特性に応じて車両特性を変更する運転支援装置10であって、運転特性を推定する運転特性推定部16と、推定された運転特性が車両の走行状況に適しているか否かを判断する運転特性判断部17と、運転特性が走行状況に適していないと運転特性判断部17が判断した場合に車両特性を変更する車両特性変更指示部18と、運転特性が走行状況に適していないと運転特性判断部17が判断した場合に運転特性が走行状況に適合するように運転者に対して運転方法を教示する運転方法教示部19と、を備えたことを特徴とする。
(もっと読む)
車両操舵装置
【課題】ラックアシストタイプのパワーステアリングシステムを搭載した車両において正確に車両の減衰力を推定できる車両操舵装置を提供すること。
【解決手段】操舵力伝達系に設けられるラック52にアシスト力を与えて操舵アシストを行う車両操舵装置であって、ラック軸力とラック変位に基づいて車両の減衰力を推定する(S14)。これにより、ステアリングシャフト3の捩れによる位相を加味して減衰力を推定できるため、ラックアシストタイプのパワーステアリングを備えた車両において減衰力を精度よく推定することができる。
(もっと読む)
車両運動制御装置及び制御方法
【課題】車両統合制御においてμ利用率の上限を最小にするロール合成配分を求める。
【解決手段】前回演算されたロール剛性配分を用いて各輪タイヤの最大発生力を表す各輪摩擦円の大きさを求め、各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力、各輪のμ利用率の上限値に対する割合を表す各輪利用率、及びロール剛性配分を演算し、演算された各輪タイヤ発生力及びロール剛性配分に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御すると共に演算されたロール剛性配分が得られるようにサスペンションを制御する。
(もっと読む)
1 - 20 / 46
[ Back to top ]