
Fターム[3D301AA45]の内容
Fターム[3D301AA45]の下位に属するFターム
車両前方情報から前/後輪を制御 (27)
前輪情報から後輪を制御 (12)
Fターム[3D301AA45]に分類される特許
1 - 20 / 50
立体加速度値の重力細分化制御装置
【課題】 車両及び搭乗者に制止時以外の加速度が検出された場合に、その加速度に対し立体座標に於ける点対称となるように車両や座席の傾き及び高さを素早く調節することによって、搭乗者及び走行への危険性が増す状態を軽減もしくはなくすようにする立体加速度値の重力細分化制御装置を提供する。
【解決手段】 単体加速度センサーの高速な情報をXYZ軸の立体加速度値として算出し、その立体加速度値を基にダンパの加減圧を個別制御し車両や座席の高さや角度を常時変化させて、現在の走行状況もしくは予め登録している走行状況に於ける加速度を相殺する機能を搭載する基盤を設けた立体加速度値の重力細分化制御装置を特徴とする。
(もっと読む)
走行支援システム
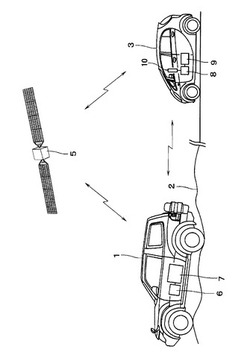
【課題】自車両の走破性能を調整して地図上にない走行経路や災害等で不整地となった走行経路の走行を支援する。
【解決手段】他車両1が地図上にない不整地2(走行経路)を走行した際の状況に基づいて自車両3が不整地2を走行できるか否かを判断し、自車両の走破性能で走行が可能であれば自車両3の走破性能を調整して走行を支援する。
(もっと読む)
軌道系交通車両及びその車体姿勢制御装置

【課題】軌道系交通車両の加減速時の乗り心地をよくする。
【解決手段】車両Vの前部と後部とに配置され、上下方向に変位して車体1を走行方向で傾ける傾斜アクチュエータ35と、この傾斜アクチュエータ35の駆動量を制御する傾斜アクチュエータコントローラ31とを備えている。傾斜アクチュエータコントローラ31は、車両Vの加減速によって、車体内の乗客Mに作用する車体の床面2に平行な前後方向の加速度αdを、同方向成分の重力加速度gdで打ち消し得る車体1の走行方向の傾斜角度θを求める。そして、傾斜アクチュエータコントローラ31は、この傾斜角度θを実現し得る傾斜アクチュエータ35の駆動量を求めて、この駆動量を目標駆動量とする駆動指令を傾斜アクチュエータ35に出力する。
(もっと読む)
車両
【課題】旋回性能を向上させることができるとともに、傾斜方向への外乱を受けたときにも、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、操舵部に回転可能に取り付けられた車輪であって、車体を操舵する操舵輪と、駆動部に回転可能に取り付けられた車輪であって、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を検出する横加速度センサと、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、前記車体の傾斜方向への外乱を受けたとき、車体の傾斜角度の変化のうちの外乱による変化分を抽出し、抽出した外乱による変化分に対応する制御値を加えて、車体の傾斜を制御する。
(もっと読む)
サスペンション装置
【課題】 車両の静止時(イグニッションOFF時)にエアばね装置20内の気体が温度変化により収縮することによってアクチュエータ30がバウンドストッパ37に当接することが防止されたサスペンション装置を提供すること。
【解決手段】 車高補正部62は、車両の静止時(イグニッションOFF時)に、エアばね装置20内の気体の温度低下に伴うエアばね装置20内の空気の収縮によりアクチュエータ30が収縮することによりアクチュエータ30がバウンドストッパ37に当接しないように、上記空気の収縮により車高が変化する方向とは反対の方向に車高が変化するように、内部温度センサ27が検出した内部温度Tcと外部温度センサ70が検出した外気温度Tgとの差ΔTに基づいて、エアばね装置20内に封入された気体の容量を変化させることによりアクチュエータ30の基準長を補正して、車高を補正する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
段差位置登録装置、方法およびプログラム
【課題】段差位置の登録されやすさを人為的な要因に応じて調整する技術を提供する。
【解決手段】段差位置登録装置であって、車両の走行時に段差が検出された回数を示す検出回数を車両走行路の位置ごとに取得する回数取得手段と、前記位置を段差位置として登録するための基準となる前記検出回数を示す検出回数閾値を、前記位置が工事区間に属するか否かに応じて設定する閾値設定手段と、前記検出回数が前記検出回数閾値に達した未登録の前記位置を前記段差位置として登録する登録手段と、を備える。
(もっと読む)
アクチュエータの作動制御装置
【課題】 プレビュー制御の制御性能の悪化が抑えられるアクチュエータの作動制御装置を提供すること。
【解決手段】 プレビューセンサ63によりセンサ距離z_ssrが検出されたときに検出の対象とされた路面位置を表すプレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadを記憶するためのデータ記憶位置iが演算される。そして、RAM54の記憶領域541のうち演算されたデータ記憶位置iにより表される記憶場所に路面変位量x_roadが記録される。
(もっと読む)
車両用空気ばね装置
【課題】車両の台車と車体との間に二次ばねとして設置される空気ばねの減衰性能が、路線の全区間における区間条件、或いは全速度条件において車両の走行地点や走行速度に応じて的確に調整されるようにして車両の乗り心地を向上させることを課題としている。
【解決手段】台車と車体との間に配置する空気ばね10の内室11と外部の補助空気室12との間の空気通路に駆動源6を含む可変オリフィス4を設け、車両の走行地点又は走行速度に応じて設定した最適なオリフィス径を制御装置8に予め入力し、この制御装置からの指令で設定地点又は設定走行速度のときに設定されたオリフィス径となるように前記可変オリフィスを制御するようにした。
(もっと読む)
オートバイに対して働く左右方向の力の削減のための方法及び装置
【課題】オートバイのカーブ走行の際に、後輪の横滑り、オートバイは棒立ち(ハイサイダー)を防ぐ制御装置及び方法を提供する。
【解決手段】カーブ走行の間にオートバイの後輪が左右方向にスリップする不安定な状態を後輪のスリップ角、操舵角、車体の傾斜状態、加速度、後輪のホイールスリップ等の変化度により検知して、ハイサイダーの危険が検知されると、ドライバーがその様な状況でエンジントルクを絞っても、エンジントルクの低下が自動的に制限される。
(もっと読む)
車両用状態推定装置、車両用状態推定方法、車両用懸架制御装置および自動車
【課題】サスペンションの状態推定をより高精度に行う。
【解決手段】車両用懸架制御装置1Aは、車両挙動予測部201と、車両挙動推定部202と、サスペンション制御部203とを備え、車両挙動予測部201で、車両に将来加わる予定の外乱(路面形状)に対する車両挙動を予測し、車両挙動推定部202において、この将来の車両挙動の予測結果を基に、その将来における車両挙動の推定に用いるカルマンフィルタのゲインを補正する。そして、車両挙動推定部202は、ゲインを補正したカルマンフィルタを用いて現在の車両挙動を推定し、サスペンション制御部203は、この推定結果に基づいて、能動型懸架装置の動作を制御する。
(もっと読む)
プレビュー情報に基づいて運転支援の態様を変更する車輌
【課題】車輌運転支援装置に内在する作動遅れに相当する車輌走行距離以上に車輌より前方の位置にある走行経路の状況を事前に知ることにより、車輌がその位置に至ったときその走行経路状況により適した運転性能を有するように車輌運転支援の態様を先行制御する。
【解決手段】走行経路に沿って走行中の車輌の現在位置より走行経路に沿った前方の位置にある走行経路状況が第一と第二の状況の間に異なることに対応させて車輌の運転支援制御の態様を第一と第二の異なる態様の間で変更する。
(もっと読む)
衝突軽減制御装置
【課題】この発明は、被害時に被ったエネルギを吸収して損害を抑制し、乗員への被害を軽減し、車両の挙動が不安定とならないようにすることを目的としている。
【解決手段】この発明は、衝突軽減制御装置において、衝突軽減制御手段は、予知装置により側方衝突が予知された時に、予知された衝突が発生する衝突発生側を判別し、自動ブレーキ制御装置を、ブレーキ装置が作動しない程度に遊びをなくす与圧駆動制御し、拘束制御装置がシートベルト装置に設けたモータを駆動して所定の状態までシートベルトを巻取るよう巻取り駆動制御し、サスペンション制御装置は衝突発生側とは車両上で逆側のサスペンション装置を選出した上でそれらの減衰力を衝突発生側と比較して減少させるよう減衰力低減制御し、警報装置を所定の状態で警報動作制御する、第一の段階の統合制御を実施することを特徴とする。
(もっと読む)
走行支援装置、走行支援方法及びコンピュータプログラム
【課題】必要なエネルギー量に対する管理を行うことを可能とした走行支援装置、走行支援方法及びコンピュータプログラムを提供する。
【解決手段】車両2の走行予定経路を特定し、走行予定経路の経路情報を取得し、取得した走行予定経路の経路情報に基づいて、走行予定経路を走行する場合に必要な車両2の駆動力を区間毎に推定し、推定された区間毎の車両2の駆動力に基づいて、車両2が走行予定経路を走行する際における区間毎の車輪5FL〜5RRのグリップ特性及び転がり抵抗を決定し、決定された区間毎の車輪5FL〜5RRのグリップ特性及び転がり抵抗に基づいて、車両2が前記走行予定経路を走行する際における区間毎のキャンバー角調整装置22の制御スケジュールを生成するように構成する。
(もっと読む)
ヨーレイト可変車両
【課題】サスペンション特性可変装置が故障した場合であってもヨーレイト可変手段を適切に制御する。
【解決手段】自動車1は、サスペンション特性を変化させるエアスプリング15およびダンパ16と、エアスプリング15およびダンパ16の故障を検出する故障検出部17と、後輪トー角を変化させて車体のヨーレイトγを変化させる電動アクチュエータ26と、電動アクチュエータ26を駆動制御する後輪トー角制御部21とを備える。後輪トー角制御部21は、車両の運転状態量に基づいて目標電流Itを設定する目標電流設定部23l,23rと、エアスプリング15およびダンパ16の制御状態に基づいてFF補正電流Iffを設定するFF補正電流設定部22l,22r21とを備え、故障検出部17によって故障が検出された場合、目標電流設定部24l,24rにおける目標電流Itの補正が行われないようにする。
(もっと読む)
車両の姿勢制御装置
【課題】 ノーズダイブ抑制時における車両姿勢の乱れや不自然な減速感を防止する車両の姿勢制御装置を提供する。
【解決手段】 VSA−ECU21は、ステップS1でダンパECU22によってノーズダイブ抑制制御が行われているか否かを判定し、この判定がYesであれば、ステップS2で左右後輪3rl,3rr側の制動力配分を小さくする。具体的には、EBD作動時割合より大きいノーズダイブ抑制時割合(例えば、6%)だけ、左右後輪3rl,3rr側の車輪速wrが左右前輪3fl,3fr側の車輪速wfよりも高くなるように、油圧ユニット24を駆動制御する。これにより、ノーズダイブ抑制制御によって減衰力可変ダンパの目標減衰力が高められて後輪の接地荷重が減少しても、左右後輪3rl,3rr側に過剰な制動力が作用しなくなり、旋回中の制動時において車両姿勢に乱れが生じたり、運転者が不自然な減速感を覚えたりすることがなくなる。
(もっと読む)
警報システム
【課題】車両用サスペンション装置に用いられるボールジョイントの作動不良を適切に予測して運転者に報知する警報システムを提供すること。
【解決手段】マイクロコンピュータ21は、走行距離センサ22から車両の総走行距離Lを入力し、規定距離La未満であるときに、車速センサ23からの車速V、操舵トルクセンサ25からの操舵トルクT、転舵角センサ24からの転舵角δに基づき転舵輪が据え切りされた据え切り回数N、転舵角δを積算した積算転舵角Kが必要積算転舵角Ka以上となる積算転舵回数Mまたはサスペンションストロークセンサ27からのストローク量hを積算した積算ストローク量Sが必要積算ストローク量Sa以上となる積算ストローク回数Pを設定する。そして、規定距離Laにて設定した回数N、Mまたは回数Pが規定回数未満であるときに、報知装置26を作動させてボールジョイントの作動不良を運転者に報知する。
(もっと読む)
車両のサスペンション装置
【課題】単一の伸縮アクチュエータによりバネ下振動とバネ上振動の両者を効果的に抑制する。
【解決手段】車輪側に連結された係合部材20と、車輪側の係合部材20に対して相対的に上下方向に移動可能に係合され且つ車体側に連結された係合部材18とを有し、車輪側の係合部材20に対して車体側の係合部材18が相対的に上下方向に移動することにより全体として伸縮する伸縮アクチュエータ16と、車輪側および車体側の係合部材18,20のうち一方の係合部材18を駆動する駆動手段14と、駆動手段14に制御信号を送信することにより、伸縮アクチュエータ16の動作を制御する制御部50とを設け、制御信号を、伸縮アクチュエータ16を伸縮させるための低周波成分に、車輪側係合部材20と車体側係合部材18との間の摩擦抵抗を変化させるための高周波成分が重畳されてなる信号で構成する。
(もっと読む)
制御装置
【課題】悪路走行時における乗り心地の向上を図ることができる制御装置を提供すること。
【解決手段】走行路が悪路であると判断される場合には、リンク駆動装置43が制御されることで、車輪2のキャンバ角がプラス方向(ポジティブ)に調整され、車両1の外側に配置される第1トレッド21の接地が増加する。これにより、第1トレッド21の軟らかい特性(ゴム硬度の低い特性)による影響を大きくして、車両1が路面Gから受ける衝撃を緩和することができる。その結果、悪路走行時における乗り心地の向上を図ることができる。
(もっと読む)
道路情報取得装置、運転支援装置、道路情報取得方法および道路情報取得プログラム
【課題】段差が存在せず、車両の安定化制御を実施する必要がない場所であっても安定化制御を実施してしまうことがあった。
【解決手段】自車両の現在位置を示す情報を取得し、前記自車両が道路から退出することを判定し、前記自車両が道路から退出すると判定されたときに、前記自車両が段差を通過したか否かを検出する検出部の検出結果を参照して段差を示す情報を取得し、前記退出路に前記段差が存在するときに、前記自車両の現在位置を示す情報に基づいて前記段差の位置を記憶媒体に記録する。
(もっと読む)
1 - 20 / 50
[ Back to top ]