
Fターム[3D301AA46]の内容
車体懸架装置 (72,824) | 目的、機能 (15,449) | 操安、乗心地制御 (6,736) | 予見/プレビュー制御 (89) | 車両前方情報から前/後輪を制御 (27)
Fターム[3D301AA46]に分類される特許
1 - 20 / 27
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】前方車両との車間距離を大きく空けることなく車両から前方の視認対象物を視認可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
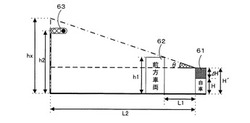
【解決手段】車高の高さを調整する為の車高調整機構4を備えた車両に搭載され、自車両61が交差点で停車した場合において、現在の自車両61の車高Hと、前方車両62の車高h1と、前方車両62までの車間距離L1と、視認対象物である信号機63の高さh2と、信号機までの距離L2をそれぞれ取得し、取得された各値から自車両61から視認対象物である信号機63を視認する為の車高である設定車高を算出し、算出された設定車高に設定する為の信号を車両制御ECU9に対して出力し、自車両61の車高が設定車高となるように制御させるように構成する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車

【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、リスクポテンシャル算出手段が、自車両の状態と、自車両周囲の障害物の状態とに基づいて、自車両周囲に存在する障害物に対するリスクポテンシャルを算出し、擬似車両挙動発生手段が、前記リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、前記サスペンション装置を制御することによって擬似的に発生させる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
運転支援システム
【課題】 運転者が煩わしさを感じることがなく、しかも、簡単な制御で走行車線内での車両の走行を維持する。
【解決手段】 車両1のずれ量に応じてアクチュエータ15が動作されて車両1が走行レーンの外側に傾斜され、運転者に対する走行レーンの視覚を、ずれ方向と逆方向に傾けて認識させ、車両のずれを修正する状態に運転者に操舵を促す。
(もっと読む)
運転支援システム
【課題】運転者が煩わしさを感じることがなく、しかも、簡単な制御で走行車線内での車両の走行を維持する。
【解決手段】運転集中状態にない時に車両1に横ずれが生じた場合、車両1のずれ量に応じてアクチュエータ15が動作されて車両1が走行レーンの内側に傾斜され、走行レーンの内側に移動する力を車両1に発生させ、車両1を走行レーンの内側に移動させる。
(もっと読む)
車両減速装置及び車両
【課題】1G以上の制動性能で車両を減速させることができ、低コストで車両の衝突を予防することができる車両減速装置を提供する。
【解決手段】車両を構成する車体1及び車輪2間に設けられ、車輪2に加わる荷重に応じて、伸縮するコイルスプリングを有する懸架装置31と、車両の衝突を予測する衝突予測部34とを備え、衝突予測部34が衝突を予測した場合、車輪2の回転を制動するようにしてある車両減速装置3に、衝突予測部34が衝突を予測した場合、コイルスプリングを可逆的に伸張させる伸張装置32を備える。
(もっと読む)
タイヤ
【課題】少なくとも走行中にキャンバ角が変化する車両に装着されるタイヤであって、省
燃費化とグリップ性能の向上との両立を図ることができるタイヤを提供すること。
【解決手段】タイヤ1100によれば、第1トレッド1141のタイヤ径方向厚さL1が
第2トレッド1142のタイヤ径方向厚さL2よりも薄く構成されているので、第1トレ
ッド1141を第2トレッド1142よりも変形し難くして、第1トレッド1141を転
がり抵抗の小さい特性に構成することができる。一方、第2トレッド1142をグリップ
力の高い特性に構成することができる。これにより、少なくとも車両1の走行中にタイヤ
1100のキャンバ角が変化し、接地面中心が第1トレッド1141又は第2トレッド1
142に変更されることで、省燃費化とグリップ性能の向上との両立を図ることができる
。
(もっと読む)
隊列走行システム
【課題】隊列の全体の消費エネルギーを小さくすることができるようにする。
【解決手段】自車位置を検出する現在地検出部と、自車10の走行状態を表す車両情報を検出する車両情報検出部47と、周辺車両11からの周辺車両情報を取得する周辺車両情報取得処理手段と、自車位置、車両情報及び周辺車両情報に基づいて隊列を編成する隊列編成処理手段と、編成された隊列で隊列走行を行う隊列走行処理手段と、前方を走行する直近の周辺車両11の車両属性情報に基づいて、高さ調整装置49を作動させ、自車10の高さ変量を変更する高さ調整処理手段とを有する。自車10の高さ変量が変更されるので、自車10の前方を走行する直近の周辺車両11の投影面内に自車を置くことができる。自然風及び走行風によって自車が受ける風圧を低くすることができる。
(もっと読む)
車両制御装置
【課題】自車両及び乗員の保護を十分に確保することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、自車両が前方対象物と衝突不可避であるかどうかを判定する衝突不可避判定手段5bと、自車両の車高を調整する車高調整手段5eとを備え、衝突不可避判定手段5bが、自車両が前方対象物と衝突不可避であると判定する場合には、車高調整手段5eが車高を自車両の保護に適した車高(Dの絶対値<δ)とすることを特徴とすることを特徴とする。
(もっと読む)
サスペンションシステム
【課題】サスペンションシステムにおいて、高周波数の振動が生じても、低周波数の振動が生じても、良好に振動を抑制可能とする。
【解決手段】ばね下部の振動の周波数がしきい値以下である場合には、位相進みの程度が小さい特性で位相進み処理が行われる(a)。その結果、ばね下変位の制御によって、ばね上部のばね上共振周波数付近の振動を良好に抑制することができる。ばね下部の振動の周波数がしきい値より高い場合には、位相進みの程度が大きい特性で位相進み処理が行われる(b)。その結果、ばね下共振周波数付近のばね下の振動を良好に抑制することができ、それによって、ばね上部の振動を抑制することができる。
(もっと読む)
運転支援システム、運転支援方法及び運転支援プログラム
【課題】運転者の覚醒度に応じて制御対象の段差に対するサスペンション制御を行うことができる運転支援システム、運転支援方法及び運転支援プログラムを提供する。
【解決手段】車両が段差を通過する際にサスペンション制御を行う制御システム1において、運転者の覚醒度を検出し、前記覚醒度に応じたレベル値を設定し、車両の前方に、制御対象の段差を検出したか否かを判断するとともに、車両前方に段差を検出した際、レベル値に応じてサスペンション制御を実行する否かを判定するナビゲーションコンピュータ10を備える。
(もっと読む)
サスペンション制御装置
【目的】プレビュー制御が行われるサスペンション制御装置において、余裕時間が制御遅れで決まる設定時間より短い場合に、良好に上下方向の振動が抑制されるようにすることである。
【解決手段】前輪側に設けられたばね上加速度センサ196Fによる検出値と、車高センサ198Fによる検出値とに基づいて、ばね下絶対速度を取得し、ばね下絶対速度と、プレビューゲインとで決まる減衰力が発生させられるように後輪側の上下方向力発生装置24Rのアクチュエータ124Rを制御する場合に、その制御指令値が、車速VとホイールベースLWとで決まる余裕時間から制御遅れ時間を引いた待ち時間の経過後に出力される。この場合に、余裕時間が制御遅れ時間より短くなった場合には、車速が大きい場合は小さい場合よりプレビューゲインを小さい値とする。その結果、余裕時間が制御遅れ時間より短くなっても、乗り心地が悪くなることを回避し、後輪の上下挙動を良好に抑制することができる。
(もっと読む)
コーナー学習システム
【課題】 コーナー開始点の検出精度を向上させる。
【解決手段】 サスペンションECU21は、操舵速度ωxが第1基準値ω1を上回ったときにナビゲーションECUに対して操舵開始点仮記憶指令を出力する。その後、操舵速度が第2基準値ω2にまで低下した後、基準時間のあいだ操舵速度が第2基準値ω2以下に収まり、操舵角度θxが判定操舵角度範囲θref(θ1〜θ2)内に入っており、かつ、横加速度Gyxが判定横加速度範囲Gyref(Gy1〜Gy2)内に入っているときに、車両がコーナーを走行中であると判定し、サスペンションECU21からナビゲーションECU11にコーナー開始推定点確定指令を出力する。これによりナビゲーションECU11は、記憶装置14に記憶されているコーナー開始点を、コーナー開始推定点に補正する。
(もっと読む)
車両の挙動制御装置
【課題】車両の挙動を変更可能なアクチュエータを自車両の現在位置の検出誤差等を考慮して適切な制御タイミングで作動させること。
【解決手段】サスペンションECUはステップS52にて自車両の検出現在位置と地図上の現在位置との一致精度を表す信頼度Sを計算する。ステップS54においては、信頼度Sと、ナビイベント開始地点と実際に路面凹凸部分が存在する地点まで距離Lsとの相関係数Rを計算する。そして、ステップS56にて相関係数Rが所定値R0以上であれば、ステップS57にて相関性を表す回帰直線Mを計算する。このように回帰直線Mを計算すると、次回以降同一のナビイベント開始地点を走行する際には、ステップS59において、信頼度Sと回帰直線Mとを用いて適切な延長距離L5を計算する。したがって、事前作動制御が適切に延長され、アクチュエータを適切な制御タイミングで作動させることができる。
(もっと読む)
自動車のアクティブシャシのバネ力特性を制御する装置及び方法
本発明は、自動車のアクティブシャシのバネ力特性を制御する装置及び方法であって、作動装置(16i)を制御することによりホイールスプリング装置(15i)のバネ力特性を変更できる、車体と車輪キャリアとの間に配置されたホイールスプリング装置(15i)と、自動車の前方の経路の垂直断面を反映する予測変数(hi)を検出するためのセンサ(21)と、ホイールスプリング装置(15i)のバネ力特性が自動車の前方の経路の垂直断面の形状に対して予測的に調節されるように検出された予測変数(hi)に基づいて、作動装置(16i)を制御する制御装置(22)を有する装置及び方法に関する。 (もっと読む)
車両用運転支援装置、及び、車両用表示装置
【課題】自車両をすれ違い可能な位置に誘導するための制御を適切に行なうことができる車両用運転支援装置、及びこれに適した車両用表示装置を提供すること。
【解決手段】道路幅を含む自車両の周辺状況を取得する周辺状況取得手段と、周辺状況取得手段が取得した自車両の周辺状況に基づいて対向車とのすれ違いが可能か否かを判定するすれ違い可否判定手段と、対向車とのすれ違いが可能な自車両後方の位置をすれ違い可能位置として特定すると共に設定したすれ違い可能位置に自車両を誘導する誘導制御を行なう誘導制御手段と、を備え、すれ違い可否判定手段により対向車とのすれ違いが不可能であると判定され、且つ所定の開始条件を満たす場合に、誘導制御手段による誘導制御を開始することを特徴とする、車両用運転支援装置。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】車両が路面の凸部を通過する際の衝撃を和らげることができる車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】車両の前方路面にある凸部の形状を検出する凸部検出手段と、前記凸部の形状に基づいて加速度を設定する減速加速度設定手段と、前記凸部から第一の距離手前の地点を第一地点、前記第一地点から第二の距離手前の地点を第二地点として設定する地点設定手段と、前記第二地点から前記第一地点の間において前記車両を前記加速度で減速させ、前記第一地点に到達すると前記車両の減速を解除する速度制御手段と、を備える車両走行制御装置。
(もっと読む)
スタビライザ制御装置
【課題】電力制限の発生を回避して作動するスタビライザ制御装置を提供すること。
【解決手段】自車両の左右車輪間に配設される一対のスタビライザバー(13、14)(23、24)を、モータ200及び減速機構201を有するアクチュエータ15FT、15RTにより連結して、モータ200の駆動により一対のスタビライザバー(13、14)(23、24)にねじり力を付与するスタビライザ制御装置において、自車両前方のカーブを検出するカーブ検出手段34、35を有し、カーブ検出手段により検出されたカーブへ侵入する前に、スタビライザバーへのねじり力の付与を開始する、ことを特徴とする。
(もっと読む)
自動車シャシの位置調節装置
【課題】簡単な手段を用いて、情報の損失なしに複雑性を低下することが可能な自動車シャシの位置調節装置および方法を提供する。
【解決手段】制御/操作ユニットの操作信号を介して設定される、シャシ(2)に配置されているアクチュエータと、シャシ(2)の位置またはシャシ(2)と結合されている部品の位置を測定するための距離センサ(4)とを備え、距離センサ(4)の測定センサ信号が所定の目標値から偏差を有している場合、アクチュエータの調節が実行可能である、自動車シャシの位置調節装置において、車両下側の、間隔をなす少なくとも3つの位置にそれぞれ、非接触作動距離センサ(4)を備えた距離測定センサ装置(3)が配置され、且つ各距離センサ(4)を介して異なる方向(5、6、7)に少なくとも2つの距離測定が実行可能である。
(もっと読む)
1 - 20 / 27
[ Back to top ]