
Fターム[3D301AA64]の内容
Fターム[3D301AA64]に分類される特許
1 - 20 / 109
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
車両用制御装置

【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角調整装置によるキャンバ角調整動作に関する応答性の低下を検知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両1の状態に応じて、車両1の後輪のキャンバ角を第1キャンバ状態又は第2キャンバ状態に調整する。車両1の旋回中に、キャンバ角調整装置90によるキャンバ角調整動作が行われている場合に、当該車両1の内輪側、外輪側に係るキャンバ角調整装置90を構成する電気モータの電流値をそれぞれ検出し、当該内輪側に係る電気モータの電流値と、内輪基準値BIを比較することで、内輪側に係るキャンバ角調整装置90の応答性低下を検出し、外輪側に係る電気モータの電流値と、外輪基準値BOを比較することで、外輪側に係るキャンバ角調整装置90の応答性低下を検出し得る。
(もっと読む)
車体すべり角推定装置および車両姿勢制御装置
【課題】車体の横すべり角を精度良く推定することのできる車体すべり角推定装置および車両姿勢制御装置を提供する。
【解決手段】車体すべり角推定装置4は、前輪31,32および後輪33,34が設けられた車体2の横すべり角を推定する。この車体すべり角推定装置4は、前輪31,32の舵角と、前輪31,32に対して作用する横力である前輪横力と、後輪33,34に対して作用する横力である後輪横力と、車体2の重心と前輪31,32の距離と、車体2の重心と後輪33,34の距離と、車体2のヨーレートと、車速とに基づいて、車体2の横すべり角を推定する。
(もっと読む)
重心位置推定装置、車両、および重心位置推定方法、並びにプログラム
【課題】被牽引車の前後の重心の偏りに影響されることなく被牽引車の左右の重心の偏りを正しく推定することを自動的に実行する。
【解決手段】車両の偏り荷重値を所定のサンプリング周期毎に記憶する偏り荷重値記憶部28と、エアベローズ内の空気圧の変化に応じ、荷台への貨物の積載開始を判定すると共に、荷台への貨物の積載開始を判定したときからの空気圧の変化に応じ、荷台への貨物の積載完了を判定する偏り荷重値取得部29とを有し、偏り荷重値取得部29は、積載完了と判定した時刻とその所定期間前の時刻との間に偏り荷重値記憶部28に記憶された偏り荷重値のサンプリング値の平均値から積載開始と判定した時刻とその所定期間前の時刻との間に偏り荷重値記憶部28に記憶された偏り荷重値のサンプリング値の平均値を減算する左右重心位置推定装置20を構成する。
(もっと読む)
車高センサのキャリブレーション方法及びキャリブレーション装置
【課題】車高センサのキャリブレーションの精度を向上すること。
【解決手段】空気ばね20を設計値上の最大高さ及び最小高さの一方に調整して車高センサ30の出力値を検出する第一高さ検出工程と、車高センサ30の出力値が仮の中立高さとして予め定められた値となるまで空気ばね20の高さを調整して空気ばね20の高さを測定する仮中立高さ測定工程と、第一高さ検出工程にて検出された車高センサ30の出力値と、仮中立高さのときの空気ばね20の高さの実測値とに基づいて、空気ばね20の高さと車高センサ30の出力値との関係を演算する第一演算工程と、空気ばね20の高さと車高センサ30の出力値との関係から空気ばね20の設計値上の中立高さに対応する車高センサ30の出力値を演算する中立高さ演算工程と、を備える。
(もっと読む)
車両
【課題】傾斜走行用の駆動部に故障が発生したときでも応急的に走行させることができるようにする。
【解決手段】運転者が搭乗するための搭乗部と、運転者が車両を操縦するための操縦装置と、所定の車輪と連結され、互いに揺動自在に連結された複数のリンクを備えたリンク機構と、リンク機構を作動させることによって、路面に対して前記車両の全体を傾斜させる駆動部と、該駆動部に故障が発生したかどうかを判断し、駆動部に故障が発生したと判断した場合に、傾斜抑制装置を作動させて車両の傾斜を抑制する故障処置処理手段とを有する。駆動部に故障が発生したかどうかが判断され、駆動部に故障が発生したと判断されると、傾斜抑制装置が作動させられて車両の傾斜が抑制されるので、車両を応急的に走行させることができる。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角調整装置の故障を検知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、キャンバフラグ73Aによってキャンバ角調整装置44を制御し、車両1の後輪のキャンバ角を調整する。キャンバフラグ73Aがセットされている場合、車両用制御装置100は、ヨーレートセンサ装置81で検出されたヨーレートYを、ステアリングセンサ装置63Aで検出されたステア角Sで除算し、第1ヨーレートゲインを算出する(S54)。車両用制御装置100は、当該第1ヨーレートゲインから第2基準ヨーレートゲインを減算し、判断指標値Rを算出する(S55)。車両用制御装置100は、当該判断指標値Rと基準値Fの大小関係により、キャンバ角調整装置44の故障を検知する(S56)。
(もっと読む)
車両用サスペンション装置
【課題】低温始動時における電磁アクチュエータの摩擦力の影響を低減して乗り心地を向上する。
【解決手段】車両環境温度Txが閾値Trefよりも低い場合には(S12:Yes)、電磁アクチュエータをステップ駆動して(S16)、ステップ駆動する前後のモータ回転角度θm1,θm2から電気モータが回転した角度Δθを求める(S21)。この回転角度Δθから電磁アクチュエータの摩擦力を計算する(S22)。そして、電磁アクチュエータの目標アクチュエータ力fact*を、摩擦力Fに応じた荷重分だけ電磁アクチュエータの作動方向に増加補正する。これにより、目標アクチュエータ力fact*が適正値となる。
(もっと読む)
運転不適状態解消システム
【課題】運転者がイライラしている心理状態であり運転に不適切な心理状態にあるときに、車高を低下させて運転者が感じるスピード感を上昇させることで、運転者による加速操作を抑制することが可能な運転不適状態解消システムを提供すること。
【解決手段】心理状態検出手段2によって検出された検出値に基づいて、運転者の心理状態が運転に不適切な状態であるか否かを判定する。運転者がイライラして運転に不適切な心理状態であると判定された場合には、車高変更手段によって車高を低下させる。このように、車高を低下させることで、運転者が感じるスピード感を上昇させる。そして、運転者の心理状態を変化させ、体感スピードを上昇させて注意喚起を行う。
(もっと読む)
車両制御装置
【課題】アクセルオンからアクセルオフに移行したときの消費エネルギーを小さくし、エネルギー効率を高くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、キャンバ付与条件が成立したかどうかを判断するキャンバ付与条件成立判断処理手段と、キャンバ付与条件が成立した場合に車輪にキャンバを付与するキャンバ付与処理手段と、ニュートラル走行設定条件が成立したかどうかを判断するニュートラル走行設定条件成立判断処理手段と、ニュートラル走行設定条件が成立した場合に、駆動源と駆動輪との間のトルクの伝達を遮断するニュートラル走行設定処理手段とを有する。駆動源における摩擦、イナーシャ等が抵抗になって消費エネルギーが大きくなることがない。
(もっと読む)
車両の制御値設定方法
【課題】旋回外側への遠心力と重力とが釣り合うような角度になるように車体の傾斜角度を制御するために使用される制御値を短時間で簡便に、かつ、正確に設定することができ、車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができ、安全性の高い制御を行うことができるようにする。
【解決手段】横加速度センサが検出する横加速度がゼロになるように、車体の傾斜を制御する車両の制御値設定方法であって、所定の周期で所定の傾斜角度となるように車体を左右に揺動させ、横加速度センサが検出した横加速度の値に基づき、横加速度センサの高さの値を取得して制御値として設定する。
(もっと読む)
サスペンション制御装置診断方法
【課題】フィードバック制御手段を含むシステムの健全性を診断することができるサスペンション制御装置診断方法を提供する。
【解決手段】油圧ダンパ7の減衰係数を「高」、「低」とした状態で夫々、フィードバック制御で用いられる目標値(加振指令)を所定パターン(正弦波)で変化させて(ステップS3)、各状態における推力指令値StBを計測し(ステップS5、S11)、減衰係数高時、低時最大推力指令値StC、StDを求め(ステップS7、S13)、絶対値|StD−StC|を所定の判定値と比較して動作診断を行う(ステップS17)。
(もっと読む)
鉄道車両およびその懸架故障検出方法
【課題】高い輸送能力並びに高い乗客乗り心地の両方が得られると同時に、いかなる状況下でも安全で信頼できる作動を確保できる鉄道車両を提供することにある。
【解決手段】本発明は、貨車ボディ(102)と、該貨車ボディ(102)を支持する走行装置(104)を備えた懸架システム(103)とを有する鉄道車両に関する。センサ装置(109)および制御装置(107)が設けられ、センサ装置(109)は少なくとも1つの状態変数の実際値を捕捉し、状態変数は、走行装置(104)の一部に関連するセンサ装置(109)の第1基準部品(109.9)と、貨車ボディ(102)に関連するセンサ装置(109)の第2基準部品(109.5〜109.8)との間の空間的関係を表わしている。制御装置(107)は、状態変数の実際値を用いて故障分析を遂行し、故障分析は少なくとも1つの所定故障基準を満たす評価を行う。制御装置(107)は、故障分析によって、故障基準が満たされることが明らかになった場合に故障信号を発生する。
(もっと読む)
ショックアブソーバ装置
【課題】 車両の使用度合に比べてブラシの消耗度合が先行しないようにして、ブラシ交換をできるだけしなくて済むようにする。
【解決手段】 電磁式ショックアブソーバの電動モータのブラシ寿命を表す回転数Nlimitに対する現時点までのトータル回転数Ntotalの比であるブラシ消耗度合(Ntotal/Nlimit)と、車両の耐久走行距離Ytargetに対する走行距離Ytotalの比である車両使用度合(Ytotal/Ytarget)とを計算する。車両使用度合に比べてブラシ消耗度合が大きい場合には、目標減衰力F*に補正係数K(>1)を乗じて減衰力を増加させる。
(もっと読む)
車体傾動制御装置及びその方法
【課題】車体を傾動させる装置が正常でない場合に、車体の姿勢を車両の走行に適合した姿勢にする。
【解決手段】車体傾動制御装置は、車両前後方向に少なくとも2つ配置されそれぞれ、ロール方向に車体を傾動させる車体傾動装置21F,21Rと、車輪を転舵させる運転者の運転操作に応じて、各車体傾動装置21F,21Rを駆動制御する車体傾動装置駆動部25F,25Rと、各車体傾動装置21F,21Rが正常か否かを判定する車体傾動装置異常判定部31と、ロール方向の車体の姿勢を固定する車体傾動停止装置26と、を備え、車体傾動装置駆動部25F,25Rが、車体傾動装置異常判定部31が車体傾動装置21F,21Rの1つが正常でないと判定すると、車体傾動装置異常判定部31が正常と判定した車体傾動装置21F,21Rを駆動制御して、車体の姿勢をロール方向で中立姿勢にし、車体傾動停止装置26が、その中立姿勢に固定する。
(もっと読む)
操舵制御車両
【課題】操舵制御手段が制御不能となった場合に車両挙動をより安定化させる。
【解決手段】自動車Vは、左右後輪3rに設けられた後輪トー角可変機構6と、左右前輪3fと左右後輪3rに設けられた減衰力可変ダンパ4およびスタビライザ8とを有する。ECU20は、故障検出部34によって左右両方の後輪トー角可変機構6に故障が検出された場合(ステップS5:Yes)、前輪3のダンパ4rの目標減衰力を大きく補正するとともに(ステップS6)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。また、ECU20は、故障検出部34によって左右どちらかの後輪トー角可変機構6に故障が検出された場合(ステップS5:No)、故障した側の後輪3rの目標減衰力を小さく設定するとともに(ステップS11,S13)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。
(もっと読む)
姿勢制御装置
【課題】車両の姿勢の安定化制御を適切に行う。
姿勢制御機能を有する車両の、悪路での乗り心地を改善する。
【解決手段】姿勢制御用のコントローラ103は、センサ群102から供給される路面状況に基づいて、車両の運動及び姿勢を制御するモータ131〜139の制御量を制御する。コントローラ103は、路面の傾きを推定し、車両の重心に加わる力を、後輪と前左輪を結ぶ線を含む第1の垂面、後輪と前右輪を結ぶ線を含む第2の垂面、前輪同士を結ぶ線を含む垂面に投影した力を求め、各垂面に投影した力が、各垂面に投影した路面に直角方向となるように、右リーンと左リーンとを制御する。
(もっと読む)
ばね上縦加速度センサ異常検出装置
【課題】高精度な異常判定機能を有するばね上縦加速度センサ異常検出装置を提供する。
【解決手段】(a)車体の前後方向の位置に対応するX軸と(b)車体の車幅方向の位置に対応するY軸と(c)XY平面に垂直な方向に延びて車体の上下に延びる軸線方向の加速度の大きさに対応するG軸とによって規定される座標空間を定義した場合において、4つのばね上縦加速度センサの各々の車体への配設位置における前後方向の位置xおよび車幅方向の位置yと検出された車体の上下に延びる軸線方向の加速度の値gとに対応して座標空間内に定まる4点A,B,C,Dが一平面上にあるとみなせる場合に、それら4つのばね上縦加速度センサの各々に異常は無いと判定し、それら4点A,B,C,Dが一平面上にないとみなせる場合に、それら4つのばね上縦加速度センサのうちの少なくとも1つのものに異常が発生したと判定する。
(もっと読む)
車両の後輪操舵制御装置
【課題】アクティブサスペンション装置の制御失陥により車両がロール方向に傾いた状態に保持されたときに車両が直進するように後輪を操舵する制御装置を提供する。
【解決手段】車輪を車体に懸架するサスペンション7をアクチュエータで駆動するアクティブサスペンション装置が設けられた車両の左右後輪を操舵制御する後輪操舵制御装置である。この装置は、車両の運動状態量を検出する状態量検出手段17,18,19を備えている。そして、アクティブサスペンション装置の制御失陥により車両がロール方向に傾いた状態に保持されたとき、検出された前記運動状態量に基づいてロール角を算出し、このロール角に応じて車両が直進するように後輪を操舵するように構成する。
(もっと読む)
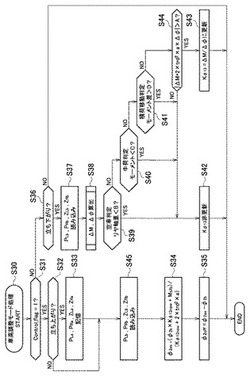
エアサスペンション装置
【課題】エアばねに対する給排気を適切に行なうことができるエアサスペンション装置を提供する。
【解決手段】給気時間が最大連続給気時間以上で、かつ、車高が所定値以下(制御不感帯以内)であるか否かの判定(ステップS33)で、イエスと判定すると、異常フラグ(車高上昇調整異常)をRAM及びeepromへセットし(ステップS34、S35)、これ以降の制御周期でのコンプレッサ制御信号の出力は停止し、コンプレッサの駆動、ひいてはエアばねへの圧縮空気の供給を停止する。このため、過積載状態でのエアばねへの給気継続が行われる従来技術を用いた車両の凹凸路走行等に伴って起こり易いエアばねの内圧の過大な上昇を回避でき、エアばねの耐久性の低下を抑制できる。エンジン停止・始動があってもeepromに記憶された異常フラグはセット状態が維持されので、エアばねの耐久性の低下抑制効果を継続して維持できる。
(もっと読む)
1 - 20 / 109
[ Back to top ]