
Fターム[3D301AB30]の内容
Fターム[3D301AB30]に分類される特許
1 - 20 / 66
運搬車両
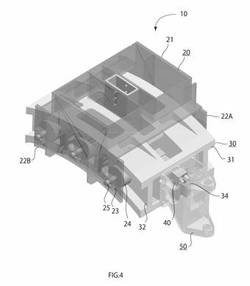
【課題】走行路の状況や荷台への荷重の状況に対応して、荷崩れや車両の転倒を防止することの可能な運搬車両を提供する。
【解決手段】運搬車両は、輪軸50と、フレームと、運搬車両の重心を補正する重心補正装置10であって、輪軸50に対して固定され、ローラー受け円弧溝32が形成されたスイング台30と、フレーム3に対して固定され、ローラー受け円弧溝32内をスライドするスライドローラー24が設置されたフレーム受け台20と、スイング台30とフレーム受け台20とを相対的にスライドさせるための駆動部材40と、を有し、スイング台30とフレーム受け台20とを相対的に回転スライドさせる重心補正装置10と、を備える。
(もっと読む)
車両用傾き規制装置とその規制装置を備えた車両

【課題】 車両の横幅方向への傾きを規制して車両の横転を防止すること。
【解決手段】 車両の車体側に取り付けられる車体側ギヤと、前記車両の車軸側に取り付けられる車軸側ギヤを備え、前記車体側ギヤと車軸側ギヤは互いに昇降スライド可能に且つ相対的に接近・離間可能に配置され、前記両ギヤ又はいずれか一方のギヤは、車体が所定角度以上傾斜すると駆動体により相対的に接近駆動されて互いに噛み合って係止して、車体の傾斜を規制できるようにした。この車両用傾き規制装置を車両の進行方向左右両側に取り付けた。
(もっと読む)
車両の運動制御装置
【課題】過渡操舵(レーンチェンジ挙動)が行われる場合において、運転者へ違和感を与えることなくステア特性制御を確実に実行して車両の安定性を確保すること。
【解決手段】直進状態から、一旋回方向側において急激なステアリングホイールの切り込み・切り戻し操作(第1操舵)が行われ、その後に連続して他旋回方向側においてステアリングホイールの切り込み・切り戻し操作(第2操舵)が行われる場合を想定する。第1操舵中は第1演算特性MP1に基づいてステア特性が調整され、第2操舵中は第2演算特性MP2に基づいてステア特性が調整される。第1操舵中において旋回変化量dJr(操舵角速度)が所定値を超えたとき、第2演算特性MP2がよりアンダステア側の特性に直ちに修正される。即ち、第1操舵に連続する第2操舵が開始される前にて、第2操舵に対応するステア特性制御の目標特性がよりアンダステア側の特性に予め修正される。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の補助を行うこと。
【解決手段】車輪と車体との間に介在された能動型のサスペンション装置と、車両周囲の障害物を検出する障害物検出手段と、障害物検出手段によって検出した障害物の種類を判別する障害物判別手段と、障害物判別手段の判別結果に基づいて、傾斜角を有する仮想路面を設定する仮想路面設定手段と、仮想路面設定手段によって設定した仮想路面の傾斜角と対応させて、能動型のサスペンション装置を制御し、車体を傾斜させる車体制御手段と、障害物検出手段によって検出した障害物への接近度合いに応じて、操舵反力を制御する操舵反力制御手段とを備える。
(もっと読む)
車線逸脱警報装置
【課題】車両が車線を逸脱すると予測された場合に、運転者がすぐに回避行動を取ることができる車線逸脱警報装置を提供する。
【解決手段】車両(V)の走行車線からの逸脱が予測された場合(ステップS1)、一時的に後輪トー角を前輪と逆相に制御して逸脱方向のヨーモーメントが発生させるとともに、サスペンションを制御してロール感を強調する(ステップS2〜S4)。このため、車両運転者は、強い注意を喚起されてすばやく回避動作を取ることができる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、リスクポテンシャル算出手段が、自車両の状態と、自車両周囲の障害物の状態とに基づいて、自車両周囲に存在する障害物に対するリスクポテンシャルを算出し、擬似車両挙動発生手段が、前記リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、前記サスペンション装置を制御することによって擬似的に発生させる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
車両用運動制御装置
【課題】車両の安定性を確保しながら的確に障害物を回避する。
【解決手段】各タイヤの実際のタイヤ力を検出するタイヤ力検出手段(20)と、障害物との衝突を回避するために各タイヤの目標制動力を設定する制動制御目標制動力設定手段(S105)と、目標制動力の下で各タイヤの制動力を制御する制動制御手段(S110)と、各タイヤの制動力を制御した後に、該制動力の制御に続いて左右のタイヤの制動力の差によって車両を旋回させる回頭制御手段(S112-S122)と、車両の旋回方向を決定する障害物回避方向決定手段(S113,S121,S122)と、回頭制御手段(S112-S122)による各タイヤの制動制御の目標制動力を設定する回頭制御目標制動力設定手段(S118,S115)とを有する。
(もっと読む)
運転支援システム
【課題】 運転者が煩わしさを感じることがなく、しかも、簡単な制御で走行車線内での車両の走行を維持する。
【解決手段】 車両1のずれ量に応じてアクチュエータ15が動作されて車両1が走行レーンの外側に傾斜され、運転者に対する走行レーンの視覚を、ずれ方向と逆方向に傾けて認識させ、車両のずれを修正する状態に運転者に操舵を促す。
(もっと読む)
運転支援システム
【課題】運転者が煩わしさを感じることがなく、しかも、簡単な制御で走行車線内での車両の走行を維持する。
【解決手段】運転集中状態にない時に車両1に横ずれが生じた場合、車両1のずれ量に応じてアクチュエータ15が動作されて車両1が走行レーンの内側に傾斜され、走行レーンの内側に移動する力を車両1に発生させ、車両1を走行レーンの内側に移動させる。
(もっと読む)
走行状況報知装置
【課題】 運転操作や路面状態を運転者に適切にフィードバックする。
【解決手段】 報知信号生成部24は、ステップS21で各ダンパ4の駆動電流Idrの平均値(平均駆動電流)Idaを算出した後、ステップS22で平均駆動電流Idaの値が所定の第1報知判定閾値Ith1を上回ったか否かを判定する。自動車Vが急旋回や急加減速してステップS22の判定Yesになると、報知信号生成部24は、ステップS24で平均駆動電流Idaに所定の第1ゲインを乗じて振動報知信号Sbを生成した後、ステップS25で振動報知信号Sbに基づいて両バイブレータ15,17を駆動する。これにより、運転者は、アクセルペダルPaやブレーキペダルPbを介して足裏に振動を感じ、急激なステアリング操作やアクセル/ブレーキ操作を行ったことを認識できる。
(もっと読む)
車両減速装置及び車両
【課題】1G以上の制動性能で車両を減速させることができ、低コストで車両の衝突を予防することができる車両減速装置を提供する。
【解決手段】車両を構成する車体1及び車輪2間に設けられ、車輪2に加わる荷重に応じて、伸縮するコイルスプリングを有する懸架装置31と、車両の衝突を予測する衝突予測部34とを備え、衝突予測部34が衝突を予測した場合、車輪2の回転を制動するようにしてある車両減速装置3に、衝突予測部34が衝突を予測した場合、コイルスプリングを可逆的に伸張させる伸張装置32を備える。
(もっと読む)
制動力制御装置
【課題】
衝突の回避が不可と判断されて自動ブレーキが作動中に、路面の段差により車輪が路面から離れてしまうと輪荷重が減少して制動距離が長くなる。
【解決手段】
本制動力制御装置は、自車と障害物との相対距離及び相対速度を計測する第1のセンサと、路面の段差の上下変化状態及び自車と段差までの距離を計測する第2のセンサと、相対距離及び相対速度に基づいて、自車と障害物とが衝突するか否かを判断する衝突判断部と、上下変化状態及び段差までの距離に基づいて、自車が当該段差を通過する時のサスペンションの制御方向を判断する路面判断部と、ブレーキを制御するブレーキ制御部と、自車の車高を制御する車高制御部と、を備え、車高制御部は、ブレーキ制御部がブレーキを制御した際、車高を現在の車高よりも高く上げるよう制御し、路面に段差がある場合、当該段差の形状に基づいて当該車高の制御を変更する。
(もっと読む)
危険回避支援システム
【課題】この発明は、運転者に通常レベルの安全運転を意識させた上で、危険回避時には、運転者の意図する危険回避動作を素早く且つ確実に支援できる危険回避支援システムを提供することを課題とする。
【解決手段】危険回避支援システム1は、前方車両が急ブレーキをかけた場合など、当該車両が危険回避動作を必要とする状況に陥ったことを検知する検知部2を有する。システムの制御部10は、この検知部2を介して危険回避動作が必要であることを検知したとき、当該車両の動作モードを通常モードから最大支援モードに切り換える。
(もっと読む)
連接車両安定化システム
【課題】連接車両を提供すること。
【解決手段】連接車両は、車両のトレーラ部の転覆を阻止するためになされた安定化システムを含む。
(もっと読む)
制御装置及び車両
【課題】走行中における一時的な車輪のスリップの発生を有効に防止し得る制御装置及び車両を提供すること。
【解決手段】本発明の制御装置及び車両によれば、車両の車輪状態検出手段により検出される各車輪の状態の比較に基づいて、複数の車輪の中にスリップの可能性がある車輪が存在するか否かが判定手段によって判定される。ここで、スリップの可能性がある車輪が存在すると判定された場合には、キャンバ角調整手段によって、キャンバ角調整装置を作動させ、該スリップの可能性があると判定された車輪のキャンバ角を、ネガティブ側又はポジティブ側に所定角度傾斜するように調整する。その結果、車輪の面圧を上げたり車高を下げたりできるので、車輪の接地荷重が高まり、走行中における一時的な車輪のスリップの発生を防止することできる。
(もっと読む)
制御装置
【課題】障害物との接触による車輪側面の損傷を有効に防止し得る制御装置を提供すること。
【解決手段】本発明の制御装置によれば、車両状況取得手段により取得した車両の状況を示す情報に基づいて、車輪の側面に障害物が接触する可能性があるか否かが接触判断手段によって判断される。このとき、車輪の側面に障害物が接触する可能性があると判断された場合には、キャンバ角調整手段によって、キャンバ角調整装置を作動させ、車輪のキャンバ角をネガティブキャンバに調整する。よって、車輪の側面に障害物が接触する可能性がある場合には、該側面が上方を向く側に傾けられ、該側面と障害物との接触可能領域が低減されるので、障害物との接触による車輪側面の損傷を有効に防止できる。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】旋回走行時における操縦安定性の向上等を実現した減衰力可変ダンパの制御装置を提供する。
【解決手段】後輪減衰力補正部は、ステップS21で、アクセルセンサから入力したアクセルポジションPaに基づいてアクセルペダルの踏込速度Saを算出した後、ステップS22で、この踏込速度Saに基づき減衰力補正ベース値DCbを算出する。ステップS23で、ヨーレイトセンサから入力したヨーレイトγと、操舵角センサから入力した操舵角δと、車速センサから入力した車速vとに基づき走行路面の摩擦係数μを推定した後、摩擦係数μに基づきμゲインGμを設定する。ステップS25で、車速センサから入力した車速vに基づき車速ゲインGvを設定する。ステップS26で、減衰力補正ベース値DCbに対してμゲインGμおよび車速ゲインGvを乗じることによって減衰力補正値DCを算出する。
(もっと読む)
運転支援システム、運転支援方法及び運転支援プログラム
【課題】運転者の覚醒度に応じて制御対象の段差に対するサスペンション制御を行うことができる運転支援システム、運転支援方法及び運転支援プログラムを提供する。
【解決手段】車両が段差を通過する際にサスペンション制御を行う制御システム1において、運転者の覚醒度を検出し、前記覚醒度に応じたレベル値を設定し、車両の前方に、制御対象の段差を検出したか否かを判断するとともに、車両前方に段差を検出した際、レベル値に応じてサスペンション制御を実行する否かを判定するナビゲーションコンピュータ10を備える。
(もっと読む)
車両用サスペンション制御装置
【課題】車輪3に付与する制御力によって、旋回中の自動車Aの内外輪の接地荷重配分を適切に変化させ、これにより旋回挙動を最適に制御できるようにする。
【解決手段】旋回中に生じるヨーレイトφ′及び横滑り量Vyの目標値からの偏差が最小となるように、所定の制御則に則って各車輪3毎の電磁アクチュエータ2を制御する。その制御則として、少なくとも、ヨーレイト偏差の大きさを表す項と、横滑り量偏差の大きさを表す項と、電磁アクチュエータ2から制御対象である車体B及び車輪3への伝達エネルギを表す項と、該車体B及び車輪3の全エネルギ収支を表す項とを、有する関数Lの積分を最小化する最適制御則を用いる。自動車Aの走行状態に基づき、最適制御則に含まれる操縦性及び安定性の重み係数κの値を変更して、挙動制御の特性を補正する。
(もっと読む)
1 - 20 / 66
[ Back to top ]