
Fターム[3D301EA22]の内容
Fターム[3D301EA22]に分類される特許
1 - 20 / 475
車両のロール角推定方法及び装置
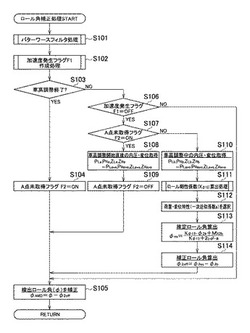
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両のロール角推定方法及び装置

【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】左右サスペンションの何れか一方の荷重−変位特性(バネ特性)が線形近似可能な範囲ではない場合、更新禁止状態であると判定し、更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両状態量推定装置及びサスペンション荷重推定装置
【課題】車両状態量及びサスペンション荷重の推定精度が確保される車両状態量推定装置及びサスペンション荷重推定装置を提供する。
【解決手段】サスペンション荷重に伴うボディパネル1の歪量を、直接、ボディパネル1に取り付けられた半導体歪センサ3によって検出するので、車両走行時の荷重移動を高い精度で推定することができる。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
車両用制御装置
【課題】車両の安定性を確保しつつ操舵感を向上できる車両用制御装置を提供すること。
【解決手段】車両1の状態量が所定の第1条件を満たす場合に、後輪2RL,2RRのキャンバ角が調整されて後輪2FL,2FRにネガティブキャンバが付与される。また、車両1の状態量が第1条件と異なる第2条件を満たす場合には、後輪2FL,2FRにネガティブキャンバが付与され、車両1のステア特性がアンダーステア傾向にされる。さらに、第2条件を満たす場合には、第1条件を満たす場合より前輪2FL,2FRの等価コーナリングフォースが大きくされ、操安キャパシティが向上される。操安キャパシティが高いほど車両1の収束性が高いといえるので、第2条件を満たす場合には、車両1の安定性を確保しつつ操舵感を向上できる。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
キャンバ制御装置
【課題】燃費を十分に良くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪にキャンバを付与するためのキャンバ可変機構と、車両に振動が発生しているかどうかを判断する振動発生判断処理手段と、車両に振動が発生していると判断された場合に、所定の車輪にキャンバを付与するキャンバ付与処理手段とを有する。車両に振動が発生していると判断された場合に、所定の車輪の各タイヤに、互いに対向する方向にキャンバスラストが発生させられるので、車両を十分に安定させて走行させることができる。燃費を十分に良くすることができる。
(もっと読む)
キャンバ制御装置
【課題】スプリット路上で車両を走行させたり、発進させたりする際に、車輪に付与されたキャンバによって車両の状態が不安定になることがないようにする。
【解決手段】車両のボディと、ボディに対して回転自在に配設された複数の車輪と、該各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両がスプリット路上にあるかどうかを判断するスプリット路判断処理手段と、スプリット路判断処理手段によって車両がスプリット路上にあると判断された場合に、キャンバ可変動作を変更するキャンバ可変動作変更処理手段とを有する。車両がスプリット路上にあると判断された場合に、車輪がキャンバが付与されている状態に保持されるか、キャンバが付与されていない状態に保持されるか、又はキャンバの付与動作若しくは解除動作が遅延させられるので、車両の状態が不安定になることがない。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するときの消費電力を抑制できる車両用制御装置を提供すること。
【解決手段】車輪のキャンバ角を調整するアクチュエータを備えた車両に用いられるものであり、指標取得手段S63によりアクチュエータに供給される電力に関する指標が取得され、その指標が所定値より大きいか指標判断手段S64により判断される。判断の結果、指標が所定値より大きい場合に、電力調整手段S65によりアクチュエータに供給される電力が小さくなるように調整され、キャンバ角調整手段S66により車輪2のキャンバ角が調整される。これにより、路面の状態や車両の走行速度等により車輪2のキャンバ角を調整するときのアクチュエータの負荷が変動しても、アクチュエータの消費電力を抑制できる。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するときのアクチュエータを負荷に適した短い動作時間で駆動できる車両用制御装置を提供すること。
【解決手段】指標取得手段S43によりアクチュエータに供給される電力に関する指標が取得され、その指標が、アクチュエータの動作時間を所定の動作時間内にするために必要な電力に対応する所定値より小さいか指標判断手段S44により判断される。判断の結果、指標が所定値より小さい場合に、アクチュエータの動作時間が短くなるように、電力調整手段S45によりアクチュエータに供給される電力が調整される。これにより、路面の状態や車両1の走行速度等により車輪2のキャンバ角を調整するときのアクチュエータの負荷が変化しても、負荷に適した短い動作時間でアクチュエータを駆動できる。
(もっと読む)
キャンバ制御装置
【課題】所定の車輪にキャンバが付与されることで運転者が違和感を覚えるのを防止することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両が極低μ路を走行しているかどうかを判断する走行路判断処理手段と、該走行路判断処理手段によって、車両が極低μ路を走行していると判断された場合に、極低μ路用のキャンバ解除条件が成立したかどうかを判断するキャンバ解除条件成立判断処理手段と、キャンバ解除条件成立判断処理手段によって、極低μ路用のキャンバ解除条件が成立したと判断された場合に、所定の車輪へのキャンバの付与を解除するキャンバ解除処理手段とを有する。操舵部材を操作したときにタイヤに大きなキャンバスラストが発生するのを防止することができる。
(もっと読む)
車両用制御装置
【課題】キャンバ角調整装置の故障により、一部の車輪のキャンバ角が制御不能となった場合でも、車両の旋回時の走行安定性を確保することができる車両用制御装置を提供する。
【解決手段】故障により旋回内輪(左の後輪2RL)が調整不能となった場合には、旋回外輪(右の後輪2RR)に、旋回内輪よりも絶対値が大きなネガティブのキャンバ角を付与する。一方、故障により旋回外輪(右の後輪2RR)が調整不能となった場合には、旋回内輪(左の後輪2RL)へのネガティブキャンバの付与を解除する。これにより、車両のステア特性を、オーバーステア傾向を減少させる、或いは、アンダーステア傾向を増加させる方向へ変化させ、車両の旋回時の走行安定性を確保することができる。
(もっと読む)
車両用制御装置
【課題】撮像手段による撮像内容を用いて、自車の走行車線を維持するように車両を制御する車両用制御装置に関し、車輪のキャンバ角を調整することで、走行車線を維持可能な車両用制御装置を提供する。
【解決手段】車両用制御装置100は、フロントカメラ85により前方の走行車線DLを撮像し、画像処理部86により画像解析することにより、走行車線DLにおける左車線境界LL、右車線境界LR、自車位置を特定する。特定結果に基づき、自車が当該走行車線を逸脱しそうであると判断すると、当該車両用制御装置100は、右後輪2RR、左後輪2RLに夫々配設されたキャンバ角調整装置90を制御して、何れか一方の車輪に係るキャンバ角を、他方の車輪と異なるキャンバ角に変更し、キャンバースラストにより走行車線DL中央へと導く。
(もっと読む)
車両用制御装置
【課題】アクチュエータを小型・軽量化できる車両用制御装置を提供すること。
【解決手段】走行速度取得手段S61により車両1の走行速度が取得され、その走行速度取得手段により取得される車両1の走行速度Vが小さいほど、駆動速度調整手段により、キャンバ角調整手段S67により駆動されるアクチュエータの駆動速度が小さくされる。ここで、車両1の走行速度Vが小さくなるにつれアクチュエータの負荷が大きくなる傾向があるが、走行速度Vが小さいほどアクチュエータの駆動速度が小さくされることで、車両1の走行速度Vが小さいときにアクチュエータの負荷が大きくなることを抑制できる。その結果、走行速度Vが小さいときの負荷を考慮してアクチュエータを大型化する必要がなくなるため、アクチュエータを小型・軽量化できる。
(もっと読む)
車体すべり角推定装置および車両姿勢制御装置
【課題】車体の横すべり角を精度良く推定することのできる車体すべり角推定装置および車両姿勢制御装置を提供する。
【解決手段】車体すべり角推定装置4は、前輪31,32および後輪33,34が設けられた車体2の横すべり角を推定する。この車体すべり角推定装置4は、前輪31,32の舵角と、前輪31,32に対して作用する横力である前輪横力と、後輪33,34に対して作用する横力である後輪横力と、車体2の重心と前輪31,32の距離と、車体2の重心と後輪33,34の距離と、車体2のヨーレートと、車速とに基づいて、車体2の横すべり角を推定する。
(もっと読む)
軌道系交通車両及びその車体姿勢制御装置
【課題】軌道系交通車両の加減速時の乗り心地をよくする。
【解決手段】車両Vの前部と後部とに配置され、上下方向に変位して車体1を走行方向で傾ける傾斜アクチュエータ35と、この傾斜アクチュエータ35の駆動量を制御する傾斜アクチュエータコントローラ31とを備えている。傾斜アクチュエータコントローラ31は、車両Vの加減速によって、車体内の乗客Mに作用する車体の床面2に平行な前後方向の加速度αdを、同方向成分の重力加速度gdで打ち消し得る車体1の走行方向の傾斜角度θを求める。そして、傾斜アクチュエータコントローラ31は、この傾斜角度θを実現し得る傾斜アクチュエータ35の駆動量を求めて、この駆動量を目標駆動量とする駆動指令を傾斜アクチュエータ35に出力する。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、運転者が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行用の駆動部を駆動するための走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両の前後方向における重心の移動量を算出し、最大角加速度を算出し、最大角加速度に基づいて前記傾斜制御用の制御値の変動を制限する制御値制限処理手段を備える。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができ、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、車体に作用する横加速度及び前後加速度を検出するセンサと、操舵部又は駆動部を旋回方向に傾斜させるリンク機構と、リンク機構を作動させる傾斜用アクチュエータ装置と、車体の傾斜を制御する制御装置とを有し、制御装置は、センサが検出する横加速度に基づく傾斜制御を行うとともに、センサが検出する横加速度及び前後加速度に基づいて重心位置が制御可能な範囲を外れたか否かを判断し、重心位置が制御可能な範囲を外れた場合には車体を傾斜させる動作を停止させる。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の調整に伴って生じる車両の挙動特性の変化に基づく違和感を、運転者等に与えることのない車両用制御装置を提供する。
【解決手段】車両用制御装置100は、安定キャンバ付与基準データ72B等に規定された条件を満たす場合、キャンバ角調整装置44を制御し、左後輪2RL及び右後輪2RRのキャンバ角を調整する。又、車両用制御装置100は、旋回判定基準データ72Cの基準値と、加速度センサ装置80等の検出値を比較することで、車両1が旋回中であるか否かを判定する。車両1が旋回中である場合、車両用制御装置100は、安定キャンバ付与基準データ72Bに係る条件を満たしていても、キャンバ角調整装置44によるキャンバ角の調整を禁止する。
(もっと読む)
キャンバシステム
【課題】クランク機構に角度検出部を取り付けるための作業を簡素化することができ、クランク角を確実に検出することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、駆動部、回転体、及び回転体に取り付けられ、回転体の回転角度を検出する角度検出部を備えたキャンバ可変機構と、回転体が初期位置に置かれた状態で前記角度検出部によって検出される初期値Ksに基づいて、前記所定の車輪にキャンバを付与し、キャンバの付与を解除する際の角度検出部の稼動範囲を設定する稼動範囲設定処理手段と、回転体が回転させられている状態で角度検出部によって検出される現在角に基づいて、回転体の回転角度を稼動範囲に対する相対角度で算出する回転角度算出処理手段とを有する。回転体に角度検出部を取り付けるための作業を簡素化することができる。
(もっと読む)
1 - 20 / 475
[ Back to top ]