
Fターム[3D301EA82]の内容
Fターム[3D301EA82]の下位に属するFターム
路面摩擦係数/ミュー (85)
Fターム[3D301EA82]に分類される特許
1 - 20 / 183
作業車両
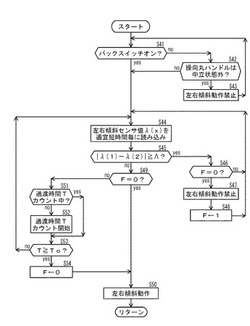
【課題】走行機体の傾斜制御の実行中に、圃場面等の傾斜や走行中の振動等によって、走行機体の傾斜姿勢が急激に変化したり傾斜角度検出用のセンサが過剰検出したりする場合に、傾斜制御を継続させて走行機体の乗り心地が悪化するという問題を解消する。
【解決手段】左右の走行部2にて支持された走行機体1と、走行機体1の左右傾斜姿勢を変更する一対のローリングアクチュエータ38と、走行機体1の前後傾斜姿勢を変更する一対のピッチングアクチュエータ177と、走行機体1の左右傾斜角度を検出する左右傾斜センサ374と、走行機体1の前後傾斜角度を検出する前後傾斜センサ381とを備える。左右傾斜制御の実行中において、現時点の左右傾斜センサ374値λ(2)とその直前の左右傾斜センサ374値λ(1)との差分の絶対値|λ(1)−λ(2)|が予め設定された左右傾斜閾値Λを上回ると、左右傾斜制御を禁止するように構成する。
(もっと読む)
車両用エアサスペンション制御装置

【課題】車両の前輪が接地する路面の高さが左右で異なっていても、車両の左右一方の前輪が浮き上がったりすることを防止しつつ、クラウチング制御を確実に行うことができ、且つ圧縮エアの消費を抑制し得、更に、乗客の乗降に伴う車両後部における姿勢変化をも確実に防止し得る車両用エアサスペンション制御装置を提供する。
【解決手段】通常モード中に、車両がうねり路にいるか否かを判断し、該車両がうねり路にいる場合には、車両後部における左右それぞれのレベリング制御を強制的に休止させ、該車両後部における左右それぞれの車高のレベリング制御休止状態でクラウチング制御が行われた際、車両前部における左右の車高の平均値がクラウチング制御用基準範囲に収まった時点での車両後部における左右それぞれの車高を記憶し、クラウチング制御が終了するまでの間、車両後部における左右それぞれの車高を前記記憶した値に保持する。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
車両用制御装置
【課題】車両が周期的な路面を走行中に、車輪が路面の凸部を一段飛ばしで走行しているかを判断し、ショックアブソーバの減衰力を適正値に変更し、車両が路面から受ける荷重を低減する車両用制御装置を提供すること。
【解決手段】路面が左右の車輪で同位相の周期的な凹部と凸部とを含む形状であるかを判断する左右輪路面形状判定装置と、左右の車輪が路面の凸部を一段飛ばしで走行しているかを判断する走行状態判定装置と、ショックアブソーバの減衰力の適正値を演算する演算装置とを有し、左右輪路面形状判定装置が路面の形状が左右の車輪で同位相の周期的な凹部と凸部とを含む形状であると判断し、走行状態判定装置が路面の凸部を一段飛ばしで走行していると判断するときに、演算装置が演算する適正値にショックアブソーバの減衰力を変更する。
(もっと読む)
運搬車両
【課題】走行路の状況や荷台への荷重の状況に対応して、荷崩れや車両の転倒を防止することの可能な運搬車両を提供する。
【解決手段】運搬車両は、輪軸50と、フレームと、運搬車両の重心を補正する重心補正装置10であって、輪軸50に対して固定され、ローラー受け円弧溝32が形成されたスイング台30と、フレーム3に対して固定され、ローラー受け円弧溝32内をスライドするスライドローラー24が設置されたフレーム受け台20と、スイング台30とフレーム受け台20とを相対的にスライドさせるための駆動部材40と、を有し、スイング台30とフレーム受け台20とを相対的に回転スライドさせる重心補正装置10と、を備える。
(もっと読む)
車高調整装置
【課題】イグニッションスイッチIGがオフされているときの消費電力を低減可能な車高調整装置(車両)100を提供する。
【解決手段】車高調整を行う車高調整手段5と、イグニッションスイッチIGのオンで起動して、車高調整手段5による車高調整を制御する制御手段9とを有する車高調整装置100において、車体1の下部に設けられ、障害物と接触した場合に信号を制御手段9に出力する接触検知手段2を有し、制御手段9は、イグニッションスイッチIGのオフで停止し、停止後に接触検知手段2から信号が入力すると起動し、車高調整を制御した後に再び停止する。制御手段9は、イグニッションスイッチIGのオフによる直近の停止後に、信号が入力した入力回数を信号が入力して起動する度にカウントし、その直近の停止から入力回数が所定回数を超えるまでの経過時間が所定時間未満である場合に、故障検知フラグを発生させ記憶する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角をアクチュエータの駆動力により調整可能な車両に対し、消費エネルギーを抑制しつつ、車輪のキャンバ角が所定角度から変化することを抑制できる車両用制御装置を提供する。
【解決手段】路面に所定値以上の凹凸が存在する場合には(S105:Yes)、その凹凸を通過する際に車両に大きなサスペンションストロークが生じ、その状態で外力が作用すると、車輪のキャンバ角が所定角度から変化する可能性がある。よって、この場合には(S105:Yes)、第2補正手段を実行することで(S121)、車両が凹凸を通過する前にキャンバ調整機構をサーボロック状態に設定しておく。その結果、外力の作用により車輪のキャンバ角が変化することをより確実に抑制することができる。
(もっと読む)
サスペンション制御装置
【課題】特に、悪路を走行中、突起を乗り越えた際の乗り心地を改善するサスペンション制御装置を提供する。
【解決手段】本サスペンション制御装置のコントローラの制御方法では、悪路走行制御中に、突起乗り越し判定部により突起乗り越し判定が成立した場合でも、悪路走行制御を継続させる。これにより、車両が悪路を走行中に突起を乗り越した際、その減衰力特性が従来よりもソフト制御になるので乗り心地を改善することができる。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】操舵操作を行ったときに、ロール挙動が増大することを抑制可能とすること。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分である前輪荷重の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、前輪荷重の変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し合計値を基にドライバ要求トルクを補正する。
(もっと読む)
車両用制御装置
【課題】撮像手段による撮像内容を用いて、自車の走行車線を維持するように車両を制御する車両用制御装置に関し、車輪のキャンバ角を調整することで、走行車線を維持可能な車両用制御装置を提供する。
【解決手段】車両用制御装置100は、フロントカメラ85により前方の走行車線DLを撮像し、画像処理部86により画像解析することにより、走行車線DLにおける左車線境界LL、右車線境界LR、自車位置を特定する。特定結果に基づき、自車が当該走行車線を逸脱しそうであると判断すると、当該車両用制御装置100は、右後輪2RR、左後輪2RLに夫々配設されたキャンバ角調整装置90を制御して、何れか一方の車輪に係るキャンバ角を、他方の車輪と異なるキャンバ角に変更し、キャンバースラストにより走行車線DL中央へと導く。
(もっと読む)
車体すべり角推定装置および車両姿勢制御装置
【課題】車体の横すべり角を精度良く推定することのできる車体すべり角推定装置および車両姿勢制御装置を提供する。
【解決手段】車体すべり角推定装置4は、前輪31,32および後輪33,34が設けられた車体2の横すべり角を推定する。この車体すべり角推定装置4は、前輪31,32の舵角と、前輪31,32に対して作用する横力である前輪横力と、後輪33,34に対して作用する横力である後輪横力と、車体2の重心と前輪31,32の距離と、車体2の重心と後輪33,34の距離と、車体2のヨーレートと、車速とに基づいて、車体2の横すべり角を推定する。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
車体姿勢制御装置
【課題】 車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができるようにした車体姿勢制御装置を提供する。
【解決手段】 車両走行時のタイヤが常用領域にある間は、ロールレイトに応じて目標ピッチレイトを算出するピッチ制御部23の方をロール抑制部18よりも優先させる。この場合、ピッチ制御部23で算出した目標減衰力に重みを与え、前記目標ピッチレイトとなるように各ダンパ6,9の減衰力特性を制御する。タイヤの路面グリップ状態が悪い限界領域では、ピッチ制御部23よりもロール抑制部18の方を優先させ、ロール抑制部18で算出した目標減衰力に重みを与える。これにより、ロール抑制制御量を大きくするように各ダンパ6,9の減衰力特性を制御する。
(もっと読む)
走行状態判定装置
【課題】車両に搭載されたカメラの撮影画像を処理してピッチ角からその車両の走行状態や路面状態を判定する走行状態判定装置において、ピッチ角を、簡単にかつ、実際との乖離なく正確に推定できるようにして判定性能を向上する。
【解決手段】車両1に搭載されたカメラ2の撮影画像を、射影変換部32によってカメラ視点を変える簡単な座標変換の処理で迅速に側面視画像に射影変換し、ピッチ角推定部4により即面視画像の時間変化から車両1のピッチ角を実際との乖離を防止して正確に推定推定する。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】前方車両との車間距離を大きく空けることなく車両から前方の視認対象物を視認可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】車高の高さを調整する為の車高調整機構4を備えた車両に搭載され、自車両61が交差点で停車した場合において、現在の自車両61の車高Hと、前方車両62の車高h1と、前方車両62までの車間距離L1と、視認対象物である信号機63の高さh2と、信号機までの距離L2をそれぞれ取得し、取得された各値から自車両61から視認対象物である信号機63を視認する為の車高である設定車高を算出し、算出された設定車高に設定する為の信号を車両制御ECU9に対して出力し、自車両61の車高が設定車高となるように制御させるように構成する。
(もっと読む)
サスペンション制御装置
【課題】 ばね上の振幅の大きさに応じて利得を調整して、フワフワ感とヒョコヒョコ感の抑制を両立させる。
【解決手段】 ばね上加速度センサ7と積分器10によって、ばね上速度ynを検出する。スケジューリングパラメータ演算器13は、ばね上速度ynの大きさに基づいてスケジューリングパラメータpを算出する。ゲインスケジュールドH∞制御器16は、ばね上速度ynとスケジューリングパラメータpとに基づいて、目標減衰力urの利得を調整する。これにより、フワフワ感とヒョコヒョコ感の抑制を両立させることができる。
(もっと読む)
サスペンション装置
【課題】インパクトショックを効果的に低減するとともに悪路旋回中における乗り心地をも向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、上記ばね下部材に作用する車両前後方向の加速度を検知する加速度検知手段5と、加速度検知手段で検知した加速度から車両が悪路を走行中であることを判定する悪路判定手段と、車両旋回を検知する旋回検知手段6とを備え、車両旋回を検知しないか悪路を走行中でない場合、上記加速度が所定の閾値を超えると緩衝器2における減衰力のうち少なくとも圧側減衰力を最小減衰力とするとともに、車両旋回を検知する場合であって車両が悪路を走行中であると判定された場合には緩衝器2における減衰力のうち少なくとも圧側減衰力を上記最小減衰力以上であって通常制御における圧側減衰力以下の小減衰力とする。
(もっと読む)
車両用発電サスペンションダンパ装置
【課題】車両のロール共振周波数付近でもオイルダンパと同程度以上のダンパ性能を発揮するとともに走行路面の凹凸に対しては必要以上にダンパが硬くならないダンパ性能が制御される車両用発電サスペンションダンパ装置を得る。
【解決手段】車両用発電サスペンションダンパ装置は、路面の凸凹に伴う車輪の振動を車体に伝えないように振動を緩衝する車両用発電サスペンションダンパ装置において、Duty比100%で動作されるとき車両のロール共振周波数付近でオイルダンパと同程度以上にサスペンション軸を伝搬する振動を緩衝する発電機と、上記発電機をDuty比が0%から100%の間で動作させる発電回生制御装置と、を備える。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
車両用制御装置
【課題】バッテリの残存容量の低下やバッテリの劣化を抑制できる車両用制御装置を提供すること。
【解決手段】バッテリ状態判断手段によりバッテリが充電不足であるか又は劣化しているか判断される。また、荷重判断手段により走行中に車輪の荷重が所定の条件を満たすか判断される。判断の結果、荷重が所定の条件を満たし、且つ、バッテリが充電不足である又は劣化している場合に、車輪のキャンバ角を絶対値が小さくなるように、キャンバ角調整装置が駆動されて調整される。荷重の小さな車輪のキャンバ角を絶対値が小さくなるように調整するので、キャンバ角調整装置の瞬間的な負荷を小さくすることができ、電力消費量を抑制できる。よって、バッテリの残存容量の低下やバッテリの劣化を抑制できる。
(もっと読む)
1 - 20 / 183
[ Back to top ]