
Fターム[3D301EB19]の内容
Fターム[3D301EB19]の下位に属するFターム
取付位置/ストローク制御 (57)
減衰係数制御、ロック/フリー (80)
ばね定数制御 (263)
Fターム[3D301EB19]に分類される特許
1 - 19 / 19
車輪位置可変車両
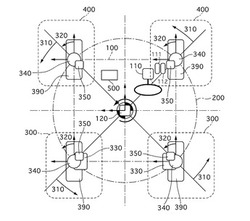
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備え、コントローラ500は、加速度方向側の車輪から重心位置までの距離を、加速度方向と反対側の車輪から重心位置までの距離に対して長くなるように設定する。
(もっと読む)
車両制御装置および車両制御方法

【課題】重心位置に偏りがある車両における制動時の安定性を向上させる技術を提供する。
【解決手段】車両制御装置1は、前輪および後輪の接地荷重を左右輪で異ならせるための接地荷重調節部としてのアクティブスタビライザ装置10と、目標ヨーレートを設定するための目標ヨーレート設定部102と、実ヨーレートを調節するためのヨーレート制御部104と、を備える。ヨーレート制御部104は、制動時に前輪および後輪それぞれの左右輪における接地荷重を異ならせて、前輪および後輪のうち制動力配分の大きい側に第1ヨーモーメントを、制動力配分の小さい側に第1ヨーモーメントと逆方向の第2ヨーモーメントを発生させ、第1ヨーモーメントと第2ヨーモーメントにより実ヨーレートを目標ヨーレートに近づける。
(もっと読む)
車両用電源制御装置
【課題】本発明は、限りある供給可能電力を有効利用することができる、車両用電源制御装置の提供を目的とする。
【解決手段】車両に搭載される複数の電気負荷(電動パワステ1や電動スタビ2など)と、これらの電気負荷に対して電力を供給するバッテリ10やオルタネータ12とを備え、ドライバーの視線を検出する視線検出装置20や道路情報を有するナビゲーション装置21などによって取得可能なこれらの電気負荷の作動を予知させる予兆情報に基づいて、これらの電気負荷の作動に伴う電力需要を推定し、その推定結果に応じてこれらの電気負荷のそれぞれに対するバッテリ10等からの電力供給を調整することを特徴とする、車両用電源制御装置。
(もっと読む)
運転支援装置
【課題】車両の走行状況に適した運転方法を運転者が容易に把握することができる運転支援装置を提供する。
【解決手段】運転者が車両を運転する運転方法によって特徴づけられる運転特性に応じて車両特性を変更する運転支援装置10であって、運転特性を推定する運転特性推定部16と、推定された運転特性が車両の走行状況に適しているか否かを判断する運転特性判断部17と、運転特性が走行状況に適していないと運転特性判断部17が判断した場合に車両特性を変更する車両特性変更指示部18と、運転特性が走行状況に適していないと運転特性判断部17が判断した場合に運転特性が走行状況に適合するように運転者に対して運転方法を教示する運転方法教示部19と、を備えたことを特徴とする。
(もっと読む)
車両
【課題】車体の傾斜許容量の拡大を図ることができる車両を提供すること。
【解決手段】車両1によれば、スライダ82を車体10に対し相対移動させると共に、そのスライダ82に支持されるバランサ81をスライダ82に対し相対移動させることで、スライダ82を介してバランサ81を車体10に対し相対移動させることができるので、スライダ82を車体10に対し相対移動させる分、車体10の傾斜許容量の拡大を図ることができる。
(もっと読む)
車両用サスペンションシステム
【課題】実用性の高い車両用サスペンションシステムを提供する。
【解決手段】ばね上部材Muとばね下部材Mlとの間に、サスペンションスプリングSS,液圧式ショックアブソーバSAおよび接近離間力発生装置Dが互いに並列的に配設され、その接近離間力発生装置が、弾性体TBと、その弾性体の直列的に配置されて自身が発揮する力を弾性体を介して車体と車輪との接近離間力として作用させる電磁式アクチュエータAとを備える車両用サスペンションシステムにおいて、接近離間力を制御する制御装置Cが、その接近離間力を振動減衰力として発生させるための制御を実行するように構成されことで、ショックアブソーバによる減衰力に加え、接近離間力発生装置によっても減衰力を発生させることができるため、目的に応じた振動減衰特性の好適化を図ることが可能となり、車両用サスペンションシステムの実用性を向上させることが可能となる。
(もっと読む)
ホイールガイド式のスタビライザ装置
本発明は、自動車のアクスルのためのスタビライザ装置に関する。前記アクスルは、ローリングスタビライザ(2)及び各ホイール毎に少なくとも1つのホイールガイドアーム(1)を有している。この場合、このホイールガイドアーム(1)のシャシー側の枢着部は、前記ローリングスタビライザ(2)の端部域と、当該ホイールガイドアーム(1)の弾発運動により前記ローリングスタビライザ(2)のねじり操作が行われるように結合されている。本発明に基づき当該スタビライザ装置は、ローリングスタビライザ(2)の各端部が、ホイールガイドアーム(1)に結合された中空軸(6)に収容されているという点において優れている。この場合、中空軸(6)はシャシー側の軸受け支持体(3)に支承されており、この軸受け支持体(3)は車両に弾性的に結合可能である。本発明によるスタビライザ装置は、特に固体伝送音分離若しくは快適車両の要求と、スタビライザの直接的な応答特性との間の構造的な目的の対立を排除するために役立つ。更に、とりわけスタビライザ装置の所要構成空間、重量及びモジュール性に関する改良が得られる。 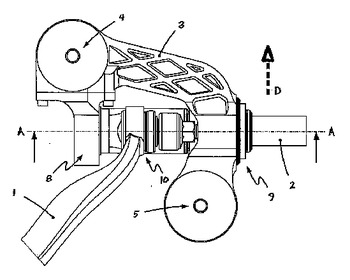 (もっと読む)
(もっと読む)
車両の制御装置
【課題】 各種電子制御ユニットを統合協調制御可能な車両の制御装置を提供することである。
【解決手段】 車輪速度を検出する車輪速度センサと、前記車輪速度センサに接続され、該車輪速度センサが検出した車輪速度に基づいて車輪の制動力及び駆動力を制御する制・駆動力制御ユニットと、運転者による操舵情報を検出する操舵情報センサと、前記操舵情報センサに接続され、該操舵情報センサが検出した操舵情報に基づいて車輪の操舵量を制御する操舵制御ユニットとを備えた車両の制御装置において、車両の慣性力を検出する慣性力センサと、前記慣性力センサに接続されるとともに、前記制・駆動力制御ユニット及び前記操舵制御ユニットと双方向通信可能に接続され、前記慣性力センサで検出した車両の慣性力及び前記制・駆動力制御ユニットと前記操舵制御ユニットの制御状態に基づいて、前記制・駆動力制御ユニット及び前記操舵制御ユニットの制御量又は制御補正量を決定して出力する協調制御ユニットとを具備したことを特徴とする。
(もっと読む)
スタビライザ制御装置
【課題】本発明は、スタビライザを高レスポンスでコントロールすることができるスタビライザ制御装置を提供することを課題とする。
【解決手段】モータによってスタビライザのロール剛性を制御するスタビライザ制御装置1であって、回生機能を有するモータ12と、左右輪を連結し、モータ12によりねじり剛性を変更可能なスタビライザ10と、車両挙動を検出する車両挙動検出手段20,21,22,31と、車両挙動検出手段20,21,22,31により検出した車両挙動に基づいてモータ12の回生電流を設定する回生電流設定手段31と、回生電流設定手段31により設定した回生電流になるようにモータの回生電流を変更する回生電流変更手段31aとを備えることを特徴とする。
(もっと読む)
差動制限装置付き差動装置による前輪駆動車の改良
【課題】車輌が一対の前輪にて操舵され且つ差動制限装置を伴う差動装置を経て駆動されるようになっていて、旋回走行中に差動制限装置が作動されると、前輪部に於いて遠心力により接地荷重が増大した旋回外側の前輪により主として駆動されることにより、車輌が旋回内側へ巻き込まれるオーバーステアが生ずる恐れがあることに対処する。
【解決手段】車輌の旋回走行中に差動制限装置が作動されるとき、荷重移動手段により一対の前輪の旋回外側の前輪より旋回内側の前輪へ荷重を移動させる。
(もっと読む)
車両のロール制御装置
【課題】例えば車両が直進或いは旋回する際に、操安定性と乗り心地とを好適に確保する。
【解決手段】車両のロール制御装置は、車両のロール剛性を変更可能な剛性調整手段と、車両の操舵速度及び操舵角の少なくとも一方に基いて車両が直進又は旋回のいずれの状態で走行するかを判定する判定手段とを備える。そして、このように判定された直進又は旋回の状態の別に応じてロール剛性を変更するように剛性調整手段を制御する制御手段とを備える。
(もっと読む)
スタビライザ制御装置
【課題】 アクチュエータを制御してスタビライザのねじり力を制御するスタビライザ制御装置において、迅速且つ適切に車体ロール運動を抑制する
【解決手段】 車両状態検出手段の検出結果(横加速度Gy、ヨーレイトγ、車速Vs及び操舵角δ)に基づき電気モータMRに対する目標トルクrを演算する。そして、一対のスタビライザバーの車両への取付端部に発生するねじりトルク(実トルクy)を、目標トルクrに追従させるように、コントローラFC(特に、2自由度制御系の定数スケーリング付きH∞制御コントローラ)によりフィードバック制御を行う。
(もっと読む)
車両用サスペンションシステム
【課題】スラローム走行時等に不足するスタビライザ装置のロール抑制効果を補い得る車両用サスペンションシステムを得る。
【解決手段】スタビライザ装置22を備えたサスペンションシステム10に、電子制御ユニット(ECU)200と減衰力を調節することが可能なショックアブソーバ34とを設ける。ECU200によってロール抑制補完プログラムを実行し、旋回方向を切り換える操作がなされたことが検出された場合に、ショックアブソーバ34の減衰力を増加させる。そうすることによって、スタビライザ装置22のアクチュエータ80の作動抵抗によってスタビライザバー70の捩れの戻り遅れが生じた場合でも、ロール抑制効果の不足を補うことができ、ロールを適切に抑制することができる。
(もっと読む)
車輌の走行運動制御装置
【課題】ロール剛性可変装置の作動状況を考慮して目標ヨーレートを適正な値に演算し、ロール剛性可変装置の作動状況に関係なく車輌の走行運動の制御を適正に行う。
【解決手段】目標アンチロールモーメントMat及びロール剛性の目標前後輪配分比Rfrに基づき前輪側アクティブスタビライザ装置16及び後輪側アクティブスタビライザ装置18が制御され(S80、100〜130)、ロール剛性の後輪に対する前輪の目標配分比Rfrが高いほど大きくなるようスタビリティファクタKhが演算され(S230)、スタビリティファクタKhに基づいて目標ヨーレートγtが演算されることによりロール剛性の後輪配分比が高いほど大きさが小さくなるよう目標ヨーレートγtが演算され(S310)、車輌のヨーレートγが目標ヨーレートγtになるよう各車輪の制駆動力が制御されることにより車輌の走行運動が制御される(S320〜340)。
(もっと読む)
スプリット路面上での車輪の駆動滑りを抑制する車輌
【課題】スプリット路面上で摩擦係数の高い側の接地荷重を大きくすれば接地荷重と摩擦係数の積の合計は大きくなるが、摩擦係数の低い側では低い摩擦係数と接地荷重の減小とが相俟って摩擦円の半径は一層小さくなり、摩擦係数の低い側で車輪に大きな滑りが生じる虞れがある。これを回避する車輌を提供する。
【解決手段】左輪と右輪に対する路面の摩擦係数に基づいて接地荷重配分手段により左輪と右輪の間で接地荷重を配分すると共に駆動力配分手段により左輪と右輪の間で駆動力を配分し且つそれによって車輌に生じるモーメントを打ち消す方向に操舵手段を操舵する。
(もっと読む)
パワーステアリング装置
【課題】 アクティブスタビライザが動作異常となったときに、運転者の操舵フィーリングの悪化を防止する。
【解決手段】 パワーステアリングシステムは、操舵トルクと車速に基づいて、正常時用のアシスト制御量KaC_Nと、異常時用のアシスト制御量KaC_Hを演算する(S301〜S303)。また、操舵角速度と車速に基づいて、ダンピング制御量DVCを演算する(S304〜S305)。アクティブスタビライザシステムの動作異常の有無を判定し、正常である場合には正常時用のアシスト制御量KaC_Nとダンピング制御量DVCを加算することでモータ電流指令値MAを演算する(S306,S307,S309)。一方、異常である場合には異常時用のアシスト制御量KaC_Hとダンピング制御量DVCを加算することでモータ電流指令値MAを演算する(S306,S308,S309)。
(もっと読む)
車両用サスペンションシステム
本発明の目的は、液圧回路を含むロール抑制装置の異常を検出することである。 前輪側の液圧シリンダ30と後輪側の液圧シリンダ60との互いに対応する液圧室同士が液通路72、74によって接続される場合において、車両の横加速度に対応して決まる液圧に対して実際の液圧が低い場合には、液漏れが生じたとすることができる。車両のローリング状態と液圧との関係に基づけば、異常を検出することができるのである。異常が検出された場合に、電磁開閉弁100,102が閉状態にされれば、2つの液圧シリンダ30,60が遮断される。液漏れが生じた一方の液圧シリンダまたは液通路の一部から他方の液圧シリンダを遮断することができる。他方の液圧シリンダにおいては、車両のローリング状態に応じた液圧差を発生させることができ、スタビライザバーに弾性力を発生させることができる。2つの液圧シリンダの両方が作用不能になる場合に比較して、ロール抑制効果の低下を抑制することができる。 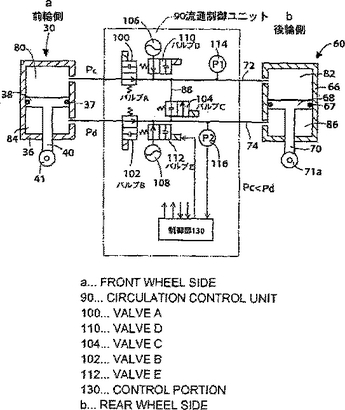 (もっと読む)
(もっと読む)
車輪の接地状態判定装置および車輪の接地状態判定方法、並びに車両運動制御装置
【課題】車輪の接地状態の良否を精度よく判定する。
【解決手段】検出部21は、車輪5の車輪中心面に垂直な方向に作用する力を横力Fyとして直接的に検出する。加速度センサ22は、車両の横方向の加速度を検出する。演算部23は、検出された横方向の加速度に基づいて、車輪5に作用するコーナリングフォースYを算出する。判定部24は、検出された横力Fyと、算出されたコーナリングフォースYとを比較することにより、車輪5の接地状態の良否を判定する。
(もっと読む)
車輌のロール剛性制御装置
【課題】前輪及び後輪の横力発生の余裕度合に応じて前後輪ロール剛性配分比を制御することにより、従来に比して車輌の旋回限界を向上させる。
【解決手段】前輪の横力発生の余裕度合Af及び後輪の横力発生の余裕度合Arが演算され(S20)、余裕度合Af及びArの差を低減するための前輪の目標ロール剛性配分比Rsdが演算され(S70)、前輪の最終目標ロール剛性配分比Rsdtが演算され(S80、90)、車輌の横加速度Gyに基づき目標アンチロールモーメントMatが演算され(S100)、最終目標ロール剛性配分比Rsdtにて目標アンチロールモーメントMatを達成するための前輪及び後輪の目標アンチロールモーメントMaft、Martが演算され(S110)、目標アンチロールモーメントMaft、Martが達成されるようアクティブスタビライザ装置16及び18が制御される(S120、130)。
(もっと読む)
1 - 19 / 19
[ Back to top ]