
Fターム[3D301EB25]の内容
車体懸架装置 (72,824) | 制御対象 (5,102) | 流体的スタビライザ/イコライザ (54) | 各車輪間回路のばね定数制御 (17)
Fターム[3D301EB25]に分類される特許
1 - 17 / 17
アクティブエアサスペンション用の給気システム
【課題】アクティブエアサスペンション用の給気システムを提供する。
【解決手段】エアサスペンションは、ピストンエアバッグと、ピストンエアバッグを覆って取り付けられた主エアバッグとをそれぞれが含む複数の空気ばねアセンブリを有する。主エアバッグおよびピストンエアバッグはそれぞれ、サスペンションを能動的に制御するために、他から独立して制御される可変空間を有する。各ピストンエアバッグは、ピストン吸気バルブおよびピストン排気バルブを含む。各主エアバッグは、対応する主エアバッグに給気し、対応する主エアバッグから排気するように動作可能な制御バルブを含む。制御バルブとピストン吸気バルブとは互いに独立して動作する。コンプレッサは供給容器に給気し、この供給容器は、主エアバッグおよびピストンエアバッグに給気するのに使用される。コンプレッサは、コンプレッサが作動しているときに、排出空気をコンプレッサ入口に送るバイパスループを含む。
(もっと読む)
プレビュー情報に基づいて運転支援の態様を変更する車輌

【課題】車輌運転支援装置に内在する作動遅れに相当する車輌走行距離以上に車輌より前方の位置にある走行経路の状況を事前に知ることにより、車輌がその位置に至ったときその走行経路状況により適した運転性能を有するように車輌運転支援の態様を先行制御する。
【解決手段】走行経路に沿って走行中の車輌の現在位置より走行経路に沿った前方の位置にある走行経路状況が第一と第二の状況の間に異なることに対応させて車輌の運転支援制御の態様を第一と第二の異なる態様の間で変更する。
(もっと読む)
状態推定装置、サスペンション制御装置及びサスペンションシステム
【課題】車両の運動状態の推定を精度高く行なうことができる状態推定装置、サスペンション制御装置及びサスペンションシステムを提供する。
【解決手段】車両2からのばね上速度(観測出力)と実車両モデル状態量推定用オブザーバ23の車両近似モデルからの推定ばね上速度(推定観測出力)との差に相当する出力偏差から、実減衰力推定用オブザーバ21の第1オブザーバゲインが動特性補償信号を算出し、実車両モデル状態量推定用オブザーバ23の第2オブザーバゲインが車両モデル補償信号を算出する。動特性補償信号は、実車両モデル状態量推定用オブザーバ23の動特性付与手段に入力され、動特性付与手段の設定内容の調整に用いられる。このため、制御上の時間遅れを発生が抑制され、良好な精度をもって振動抑制を行うことができる。
(もっと読む)
車両運動制御装置
【課題】 車両に発生するヨーモーメントを抑制し、車両の操縦安定性の向上を図ることができる車両運動制御装置を提供する。
【解決手段】 車両運動制御装置1の取得部26は、車両の操縦安定性の低下の原因であるキングピン軸モーメントを取得する。また、算出部27は、キングピン軸モーメントを打ち消す反キングピン軸モーメント発生させるような左右前輪の接地荷重量を算出する。さらに、前輪接地荷重制御部31は、この接地荷重量に基づいて左右前輪のアクティブスタビライザを制御する。これにより、車両に発生するキングピン軸モーメントを抑制することができるので、車両の操縦安定性の向上を図ることが可能となる。
(もっと読む)
道路情報取得装置、運転支援装置、道路情報取得方法および道路情報取得プログラム
【課題】段差が存在せず、車両の安定化制御を実施する必要がない場所であっても安定化制御を実施してしまうことがあった。
【解決手段】自車両の現在位置を示す情報を取得し、前記自車両が道路から退出することを判定し、前記自車両が道路から退出すると判定されたときに、前記自車両が段差を通過したか否かを検出する検出部の検出結果を参照して段差を示す情報を取得し、前記退出路に前記段差が存在するときに、前記自車両の現在位置を示す情報に基づいて前記段差の位置を記憶媒体に記録する。
(もっと読む)
走行制御装置
【課題】地震の発生時において、車両により適切な走行を行わせることができる走行制御装置を提供する。
【解決手段】走行制御装置1は、周辺センサ32、周辺車認識部12、緊急地震速報システム受信機、走行制御計画生成部22を備え、走行制御計画生成部22は、緊急地震速報システム受信機により受信した緊急地震速報に基づいて減速及び停止を行う走行計画を生成し、周辺センサ32により取得した車両周辺の障害物状況により、他車との追突及び衝突の危険性がある場合には、衝突及び追突を回避するための別の走行計画を生成する。このため、追突などの危険事象を回避しながら、地震発生時の安全を確保することができる。
(もっと読む)
車体支持システム
【課題】振動系の固有振動数が変化した場合でも、被支持質量への振動抑制効果を発揮すること。
【解決手段】この車体支持システム10は、一対の車体支持装置1c1、1c2を備える。1車体支持装置1c1の第1気室4A1と、第2車体支持装置1c2の第2気室4B2とは、第1の気体通路71で接続されている。また、第1車体支持装置1c1の第2気室4B1と、第2車体支持装置1c2の第1気室4A2とは、第2の気体通路72で接続されている。第1の気体通路71には、第1の気体通路開閉手段81が設けられており、また、第2の気体通路72には、第2の気体通路開閉手段82が設けられている。第1の気体通路開閉手段81、第2の気体通路開閉手段82は、それぞれ振動制御装置40により、所定の周波数)で開閉される。
(もっと読む)
車両のサスペンションシステムにおけるロール安定化機構に対する改良
【課題】コーナリングの際にロール安定性を付与し、凹凸地面を越すときの乗り心地を快適にする自動車のサスペンションシステムが提供される。
【解決手段】トーション手段50,51が装備されており、これらトーション手段は、横方向に近接した一対のウィッシュボーン2aとウィッシュボーン2b、一対のウィッシュボーン2cとウィッシュボーン2dを相互に連結している。各トーション手段は、二つのコンポーネント5a,5bと二つのコンポーネント5c,5dを含み、車輪アッセンブリーがほぼ垂直方向へ動くと、各コンポーネントのメインシャフトは、既知のロールスタビライザーバーのように、シャシー1に取り付けられた内側ハウジング(図示せず)をターンさせるようになる。普通、ロールスタビライザーバーは、その全長にわたり、ねじり弾性を与えるばねスチール材から製造される。
(もっと読む)
サスペンション装置
【課題】ばね定数変更装置を備えたサスペンション装置において、ばね定数変更装置の異常に起因する不具合を抑制する。
【解決手段】車両が制動状態にある場合には、左右前輪のばね定数が大きくされ(S1,2)、ステアリングホイールの操舵角の絶対値が設定値以下である場合には、前輪側の左右連通弁が連通状態とされる(S3,4)。直進操舵状態にあり、かつ、制動状態にある場合に、左右前輪のばね定数が大きくされるとともに、左右の懸架シリンダが連通させられる。仮に、左右前輪のばね定数切換弁のいずれか一方が開固着異常であり、左右でばね定数が異なる大きさとなっても、それに起因する車高差を小さくすることができ、車両が偏向させられることを回避することができる。
(もっと読む)
能動サスペンションと能動スタビライザとを協調作動させる車輌
【課題】能動サスペンションと能動スタビライザとを有する車輌に於いて、車輪接地荷重の配分制御に能動サスペンションと能動スタビライザとを同時に協調作動させ、能動サスペンションおよび能動スタビライザのいずれについても、その作動性能および耐久性を最大限に発揮させる車輌を提供する。
【解決手段】各車輪について能動サスペンションおよび能動スタビライザのそれぞれの制御により得られる許容車輪接地荷重の最大値を推定し、各車輪の目標接地荷重を能動サスペンションおよび能動スタビライザが各々の許容車輪接地荷重最大値の相対比に応じた車輪接地荷重にて分担するようにする。
(もっと読む)
懸架装置
【課題】車両の走行状態に応じたばね定数の変更を容易にすること。
【解決手段】この懸架装置100は、第1及び第2緩衝装置101、102を備える。第1及び第2緩衝装置101、102は、気体が内部に閉じ込められる第1気室11、12及び第2気室21、22とを備え、第1気室11、12と第2気室21、22とは対向配置される。また、第1及び第2緩衝装置101、102は、第1気室11、12と第2気室21、22とに支持され、かつ第1気室11、12と接触する部分の荷重支持面積A1は、第2気室21、22と接触する部分の荷重支持面積A2よりも大きい第1及び第2荷重伝達部材31、32を備える。そして、第1緩衝装置101の第1気室11と第2緩衝装置102の第2気室22とは第1連通通路51で接続されるとともに、第1緩衝装置101の第2気室21と第2緩衝装置102の第1気室12とは第2連通通路52で接続される。
(もっと読む)
懸架装置
【課題】車両の走行状態に応じたばね定数の変更を容易に実現すること。
【解決手段】この懸架装置100は、第1及び第2緩衝装置101、102を備える。第1及び第2緩衝装置101、102は、気体が内部に閉じ込められて荷重を支持する第1気室11、12及び第2気室21、22を備える。また、第1及び第2緩衝装置101、102は、第1気室11、12と第2気室21、22とで支持され、かつ第1気室11、12と接触する部分の荷重支持面積A1は、第2気室21、22と接触する部分の荷重支持面積A2よりも大きい第1及び第2荷重伝達部材31、32を備える。そして、第1緩衝装置101の第1気室11と第2緩衝装置102の第2気室22とは第1連通通路51で接続されるとともに、第1緩衝装置101の第2気室21と第2緩衝装置102の第1気室12とは第2連通通路52で接続される。
(もっと読む)
車両用制御装置
【課題】 本発明は、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避する車両用制御装置の提供を目的とする。
【解決手段】 算出手段3によって算出された自車前方の先行車の速度や加速度と走行路情報取得手段4によって取得された自車前方のコーナー情報との対照によって、先行車逸脱確率算出手段6は、先行車がコーナーから逸脱する可能性を算出する。制御態様設定手段7は、その算出結果に応じて先行車の逸脱による影響を事前に対処可能なように自車の制御態様を設定する。通報手段8は、先行車の代わりに自車側がしかるべきところにその逸脱事故を通報する。
(もっと読む)
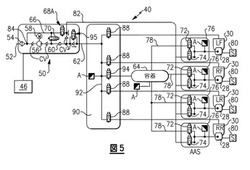
車両サスペンション用の液圧式システム
車両の液圧式サスペンションシステムは、左前方(15)、右前方(16)、左後方(18)及び右後方(17)の車輪ラムを有する。モード分断装置(100)は、シリンダ/ピストンロッドアセンブリ(124,125,126)によって形成された第1(129)、第2(130)、第3(132)及び第4(131)のバランスチャンバを有する。左前方車輪ラム(15)の圧縮チャンバ(45)は、第1のバランスチャンバ(129)と流体連通し、右前方車輪ラム(16)の圧縮チャンバ(46)は、第2のバランスチャンバ(130)と流体連通し、左後方車輪ラム(18)の圧縮チャンバ(48)は、第3のバランスチャンバ(132)と流体連通し、右後方車輪ラム(17)の圧縮チャンバ(47)は、第4のバランスチャンバ(131)と流体連通している。車体と車輪アセンブリの間には、前方及び後方の弾性車両支持手段もある。 (もっと読む)
アクティブ型車台安定化システム
【課題】
【解決手段】 本発明は、液圧供給装置2と、前車軸と関係した液圧安定器組立体4と、後車軸と関係した液圧安定器組立体5と、制御装置6とを有するアクティブ型車台安定化システムに関する。アクティブ型車台安定化システムは、2通路システムである。 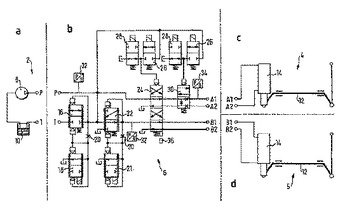 (もっと読む)
(もっと読む)
懸架システム
【課題】自動車が被けん引車をけん引している状態において無理な車高調整が行われることを回避する。
【解決手段】車高調整装置を含む懸架システムにおいて、その懸架システムが搭載されている自動車が被けん引車をけん引していることをけん引検出部により検出してけん引情報を発生させ(S1)、そのけん引情報に応じて車高調整規制部により車高調整装置の作動を規制する(S2)。車高調整の規制は、車高調整の禁止,標準車高への強制復帰,標準車高より低い設定車高への強制移行,車高調整可能範囲の減縮,車高調整装置の作動速度の低減,車高調整装置の作動継続時間の短縮等により行う。さらに、けん引中であることを運転者に報知するとともに(S3)、駆動システム,ブレーキシステム,操舵システム等自動車の走行を制御するのに必要な各システムにけん引情報を供給する(S4)。
(もっと読む)
車両転覆軽減の方法および装置
車両の転覆事象を検出する方法を提供する。車両の横運動エネルギが、車両縦速度および車両横滑り角に応答して判定される。車両の横加速度が、測定される。タイヤ垂直力が、測定される。転覆潜在力インデックスが、横運動エネルギおよび横加速度に応答して判定される。転覆インデックスが、横加速度の要因およびタイヤ垂直力の要因によって転覆潜在力インデックスに重みを付けることによって判定される。比較を行って、転覆インデックスが所定の閾値を超えるかどうかを判定する。 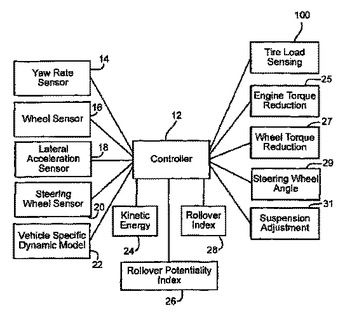 (もっと読む)
(もっと読む)
1 - 17 / 17
[ Back to top ]