
Fターム[3D301EC01]の内容
Fターム[3D301EC01]に分類される特許
1 - 20 / 1,985
サスペンション制御装置
減衰力調整式シリンダ装置
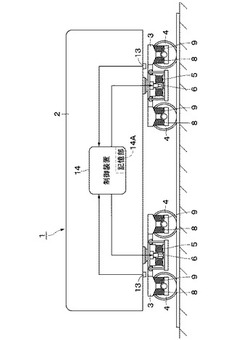
【課題】 異常を検出するときの誤検出を減らすことができる減衰力調整式シリンダ装置を提供する。
【解決手段】 減衰力可変ダンパ6は、台車3と車体2との間に連結される。減衰力可変ダンパ6には、減衰力特性を調整するアクチュエータ7が搭載されると共に、減衰力可変ダンパ6から車体2に作用する力を検出する力センサ12が内蔵されている。加速度センサ13は、車体2に設けられ、上,下方向の車体加速度を検出する。制御装置14は、正常状態と判定したときは、力センサ12と加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。一方、制御装置14は、センサ故障状態と判定したときは、力センサ12からの検出信号を用いずに、加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。
(もっと読む)
サスペンション制御装置

【課題】サスペンションのストローク速度の推定精度を向上可能とする。
【解決手段】制御装置(20)が、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分(Vb0)に基づいて目標周波数(fc)を設定する。続いて、制御装置20が、サスペンションのストローク速度(Vz)から目標周波数(fc)を含む周波数帯域の成分を除去する。また、制御装置20が、除去後のストローク速度(Vz)(ストローク速度推定値(VzSH))に基づいて、サスペンションのストローク状態を制御する。
(もっと読む)
立体加速度値の重力細分化制御装置
【課題】 車両及び搭乗者に制止時以外の加速度が検出された場合に、その加速度に対し立体座標に於ける点対称となるように車両や座席の傾き及び高さを素早く調節することによって、搭乗者及び走行への危険性が増す状態を軽減もしくはなくすようにする立体加速度値の重力細分化制御装置を提供する。
【解決手段】 単体加速度センサーの高速な情報をXYZ軸の立体加速度値として算出し、その立体加速度値を基にダンパの加減圧を個別制御し車両や座席の高さや角度を常時変化させて、現在の走行状況もしくは予め登録している走行状況に於ける加速度を相殺する機能を搭載する基盤を設けた立体加速度値の重力細分化制御装置を特徴とする。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】左右サスペンションの何れか一方の荷重−変位特性(バネ特性)が線形近似可能な範囲ではない場合、更新禁止状態であると判定し、更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両のロール角推定方法及び装置
【課題】サスペンションの変動状態や積荷の状態変化に因らず、自動車高調整非実行時のロール角を精度良く求めることが可能な方法及び装置の提供。
【解決手段】異なる2つの時点での変位及び内圧値(第1及び第2の変位と第1及び第2の内圧値)を用いて車高調整非実行時のロール角φ2esを求める第1の方法と、1つの時点での変位及び内圧値(第2の変位と第2の内圧値)と、変位及び内圧値の測定前に記憶された所定のロール剛性係数Kφ13newとを用いて車高調整非実行時のロール角φ2esを求める第2の方法とを、サスペンションの変動状態や積荷の状態変化に応じて適宜選択して用いる。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を求めることが可能な方法及び装置の提供。
【解決手段】左右サスペンションの任意の時点において測定された変位及び内圧値から、ロール角と左右サスペンションによるロールモーメントとをそれぞれ算出し、左右サスペンションの測定内圧平均値に対応する荷重−変位特性を、自動車高調整が行われなかった場合の左右サスペンションに共通の荷重−変位特性として選択し、算出したロール角及びロールモーメントと、選択した荷重−変位特性と、サスペンションを装着した車両固有の値として変位及び内圧値の測定前に記憶されたロール剛性係数とに基づき、自動車高調整が行われなかった場合のロール角を求める。
(もっと読む)
キャンバ角調整装置
【課題】軸と軸受との間のガタの発生を抑制しつつ、軸と軸受との間の摺動抵抗を低減できるキャンバ角調整装置を提供する。
【解決手段】アッパーアームの一端側が回転可能に連結されるクランクピン93bが、クランクジャーナル93aに対して偏心する。よって、クランクジャーナル93aが回転されると、アッパーアームの一端側がクランクピン93bの回転軌跡に沿って移動され、車輪のキャンバ角が調整される。クランクジャーナル93a及びクランクピン93bとジャーナル軸受96及びピン軸受97とがそれぞれ楕円形状に形成されるので、クランクジャーナル93a及びクランクピン93bの長径方向が、ジャーナル軸受96及びピン軸受97の短径方向を向いた状態では、両者の間にガタが発生することを抑制できる。一方、その状態から相対回転させる場合には、両者の間に隙間を形成して、摺動抵抗を低減できる。
(もっと読む)
サスペンションシステム
【課題】車両の走行状態に拘らず、最適な乗り心地及び走行安定性を実現することが可能なサスペンションシステムを提供する。
【解決手段】サスペンションシステム100は、上側シリンダ室10Uと、下側シリンダ室10Lと、当該下側シリンダ室10Lの開口部の開口面積を調整する可変バルブ11と、を有し、車両1が有する一対の車輪2に組み込まれた一方の減衰力制御シリンダ10Aの上側シリンダ室10Uと他方の減衰力制御シリンダ10Bの下側シリンダ室10Lとを連通する第1連通路21と、一方の減衰力制御シリンダ10Aの下側シリンダ室10Lと他方の減衰力制御シリンダ10Bの上側シリンダ室10Uとを連通する第2連通路22と、第1連通路21と第2連通路22との夫々に設けられ、減衰力制御シリンダ10A、10Bの動作に応じてオイルを貯留及び排出する一対のオイル受部23と、を備える。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
減衰力調整式緩衝器
【課題】減衰力調整式緩衝器において、ピストンロッドに作用する横力を考慮して正確な減衰力制御を行なうことができるようにする。
【解決手段】コントローラCにより、各種センサの検出信号に基づき、車両の走行状態に応じて減衰力調整式緩衝器1の減衰力調整機構6のソレノイド7に制御電流を供給して、減衰力をリアルタイム制御することにより、車両の操縦安定性及び乗心地を向上させる。減衰力調整式緩衝器1のピストンロッド5に歪センサ19を装着する。コントローラCにより、歪センサ19の検出信号に基づき、ピストンロッド5に作用する横力を演算し、この横力によって生じるピストロッドとロッドガイドとの間の摩擦力に基づき、ソレノイド7への制御電流を補正することにより、正確な減衰力制御を行なう。
(もっと読む)
車両用制御装置
【課題】車両の安定性を確保しつつ操舵感を向上できる車両用制御装置を提供すること。
【解決手段】車両1の状態量が所定の第1条件を満たす場合に、後輪2RL,2RRのキャンバ角が調整されて後輪2FL,2FRにネガティブキャンバが付与される。また、車両1の状態量が第1条件と異なる第2条件を満たす場合には、後輪2FL,2FRにネガティブキャンバが付与され、車両1のステア特性がアンダーステア傾向にされる。さらに、第2条件を満たす場合には、第1条件を満たす場合より前輪2FL,2FRの等価コーナリングフォースが大きくされ、操安キャパシティが向上される。操安キャパシティが高いほど車両1の収束性が高いといえるので、第2条件を満たす場合には、車両1の安定性を確保しつつ操舵感を向上できる。
(もっと読む)
車両
【課題】 横風に強い車両を提供することを課題とする。
【解決手段】 第1発明の車両は、横風の発生を予知し、その予知された横風に基づいて、例えば、電子制御ユニットは、支持装置30を、あらかじめ作動させて横風に対処するように制御する。そのため、第1発明の車両は、横風に強い車両となる。また、第2発明の車両は、車体の左側を流れる気流と車体の右側を流れる気流との少なくとも一方を変化させることで、車体の左右を流れる気流の間に圧力差を発生させたり、車体の横風の風下側を流れる気流を車体に当てることで、横風に対抗する力を車体に作用させる。そのため、第2発明の車両は、横風に強い車両となる。
(もっと読む)
サスペンション制御装置
【課題】積分誤差のない速度に基づいて緩衝器の制御を行うことができるようにしたサスペンション制御装置を提供する。
【解決手段】GPSセンサ9は、GPS受信機8からのGPS信号を用いて垂直方向速度情報を演算する。コントローラ10の乗り心地制御部12は、GPSセンサ9からの垂直方向速度情報をばね上速度V1として用いることによって、乗り心地制御に基づく制御指令値を出力する。一方、コントローラ10のうねり抑制制御部14は、他のコントローラ16から出力される車両状態信号に基づいて、ピッチを抑制する制御指令値を出力する。指令値切換部15は、GPS受信機8の受信状態に応じて、乗り心地制御部12による制御指令値とうねり抑制制御部14による制御指令値とのうちいずれか一方を選択して出力する。
(もっと読む)
電磁サスペンション
【課題】磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる電磁サスペンションを提供する。
【解決手段】可動子7の永久磁石9の磁極位置を検出する磁極位置検出装置11を、固定子2に設ける。この磁極位置検出装置11は、固定子2に取付けられる被検出板12と、該被検出板12の先端側に取付けられる磁極位置検出用磁石13と、被検出板12の基端側に取付けられる歪センサ14とにより構成する。歪センサ14は、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出板12の曲げ歪を検出する。これにより、磁極位置検出装置11は、この曲げ歪に対応する永久磁石9の磁極位置を検出することができる。
(もっと読む)
サスペンション制御装置
【課題】 オーバーステアを軽減して、車両の安定性を高めるようにする。
【解決手段】 車体1には操舵角δを検出する操舵角センサ12と実ヨーレートrを検出するヨーレートセンサ13を設ける。コントローラ15は、操舵角δと実ヨーレートrに基づいて、車両がオーバーステアか否かを判断する。そして、コントローラ15は、車両がオーバーステア状態と判断した場合には、操舵角δに基づく目標ヨーレートr0と実ヨーレートrとの差分に応じて、後輪側の減衰力指令信号IRRを制御する。これにより、車両がオーバーステア状態となったときに、車体1の両後輪3のうち、縮み行程の減衰力をハードに、伸び行程の減衰力をソフトに調整する。
(もっと読む)
車高調整方法及び車高調整装置
【課題】人の乗車や荷物の積載時であっても、車高を調整することで車両の操縦安定性能や乗り心地等の動的なバランスが最適となるように車両の姿勢を制御可能とする車高調整方法及び車高調整装置を提供する。
【解決手段】少なくとも1輪に車高の調整を可能とする車高調整手段が設けられた車両のいずれかの1輪を加振手段により0〜6Hzの周波数の範囲で変化させながら上下方向に加振して当該車両全輪の輪荷重値の変化を測定し、加振の周波数と、測定された各輪の輪荷重値に基づいて車両のピッチロール伝達特性を設定し、当該ピッチロール伝達特性におけるゲインのピークとなる周波数より1Hz分周波数が高いときのピッチロール伝達特性における位相がゼロに近づくように車高調整手段を制御する。
(もっと読む)
車両用エアサスペンション制御装置
【課題】車両の前輪が接地する路面の高さが左右で異なっていても、車両の左右一方の前輪が浮き上がったりすることを防止しつつ、クラウチング制御を確実に行うことができ、且つ圧縮エアの消費を抑制し得、更に、乗客の乗降に伴う車両後部における姿勢変化をも確実に防止し得る車両用エアサスペンション制御装置を提供する。
【解決手段】通常モード中に、車両がうねり路にいるか否かを判断し、該車両がうねり路にいる場合には、車両後部における左右それぞれのレベリング制御を強制的に休止させ、該車両後部における左右それぞれの車高のレベリング制御休止状態でクラウチング制御が行われた際、車両前部における左右の車高の平均値がクラウチング制御用基準範囲に収まった時点での車両後部における左右それぞれの車高を記憶し、クラウチング制御が終了するまでの間、車両後部における左右それぞれの車高を前記記憶した値に保持する。
(もっと読む)
1 - 20 / 1,985
[ Back to top ]