
Fターム[3D301EC44]の内容
車体懸架装置 (72,824) | 制御方式 (7,422) | 各輪の順序/バランスを考慮 (564) | 前後で異なる制御の設定/タイミング (287)
Fターム[3D301EC44]に分類される特許
1 - 20 / 287
車両運動制御装置及びサスペンション制御装置
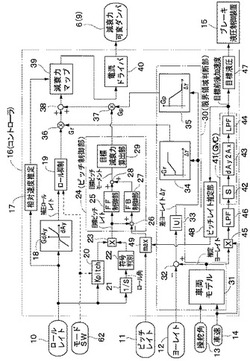
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
サスペンション制御装置

【課題】 オーバーステアを軽減して、車両の安定性を高めるようにする。
【解決手段】 車体1には操舵角δを検出する操舵角センサ12と実ヨーレートrを検出するヨーレートセンサ13を設ける。コントローラ15は、操舵角δと実ヨーレートrに基づいて、車両がオーバーステアか否かを判断する。そして、コントローラ15は、車両がオーバーステア状態と判断した場合には、操舵角δに基づく目標ヨーレートr0と実ヨーレートrとの差分に応じて、後輪側の減衰力指令信号IRRを制御する。これにより、車両がオーバーステア状態となったときに、車体1の両後輪3のうち、縮み行程の減衰力をハードに、伸び行程の減衰力をソフトに調整する。
(もっと読む)
旋回走行制御装置、旋回走行制御方法
【課題】車高に比べてトレッド幅の狭い車両の旋回性能を改善する。
【解決手段】前後輪のロール剛性に対して制限値Kφminを設定する。そして、電動スタビライザ4F及び4Rを駆動制御し、前後輪のロール剛性を個別に調整することで、前後輪のロール剛性を制限値Kφminよりも大きくする。また、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを上限値Pmax=a1Q+b1で定義し、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを下限値Pmin=a2Q+b2で定義する。そして、前後輪ロール剛性配分Pが上限値Pmaxより小さく、且つ下限値Pminより大きくなるように、電動スタビライザ4F及び4Rを駆動制御して、前後輪のロール剛性を個別に調整する。
(もっと読む)
サスペンション制御装置、サスペンション制御方法
【課題】車高に比べてトレッドが小さい車両において、旋回性能を改善する。
【解決手段】車体1にロアリンク5を取付ける取付け点52を昇降可能な構成とすることで、制御型サスペンション構造とする。この制御型サスペンション構造を、前輪に採用する場合には、車両静止状態でロールセンタ7Fを地面よりも低く設定すると共に、車両の旋回方向に応じてロアリンク5の取付け点52を昇降させることにより、旋回走行時にロールセンタ7Fを旋回外側へ移動させる。一方、制御型サスペンション構造を、後輪に採用する場合には、車両静止状態でロールセンタ7Rを地面よりも高く設定すると共に、車両の旋回方向に応じてロアリンク5の取付け点52を昇降させることにより、旋回走行時にロールセンタ7Rを旋回内側へ移動させる。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させる際に、アンダーステア特性を得やすくする。
【解決手段】前輪における左右の輪荷重移動量が、後輪における左右の輪荷重移動量よりも大きくなるように、前側駆動モータ3f及び後側駆動モータ3rを駆動制御する。具体的には、前側駆動モータ3fに対するフロント回転角制御量、及び後側駆動モータ3rに対するリア回転角制御量を算出する際、フロント回転角制御量よりもリア回転角制御量を大きくすると共に、リア回転角制御量の応答時間をフロント回転角制御量の応答時間よりも遅くする。又は、前側駆動モータ3fに対するフロント回転角制御量、及び後側駆動モータ3rに対するリア回転角制御量を算出する際、フロント回転角制御量よりもリア回転角制御量を大きくすると共に、フロント回転角制御量の応答時間をリア回転角制御量の応答時間よりも早くする。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性と回頭性とを両立できる車両用制御装置を提供すること。
【解決手段】後輪2RL,2RRのキャンバ角を調整するキャンバ角調整装置44を備える車両1において、キャンバ角調整手段によりキャンバ角調整装置44が作動されて後輪2RL,2RRのキャンバ角が調整され後輪2RL,2RRにネガティブキャンバが付与されると、車両1のステア特性がオーバーステア傾向からアンダーステア傾向へ変化する。その結果、車両1の走行安定性を向上できる。また、車両1のステア特性がオーバーステア傾向のときは、コーナリング時における車両1の回頭性が向上する。これにより車両1の走行安定性と回頭性とを両立できる。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角調整装置によるキャンバ角調整動作に関する応答性の低下を検知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両1の状態に応じて、車両1の後輪のキャンバ角を第1キャンバ状態又は第2キャンバ状態に調整する。車両1の旋回中に、キャンバ角調整装置90によるキャンバ角調整動作が行われている場合に、当該車両1の内輪側、外輪側に係るキャンバ角調整装置90を構成する電気モータの電流値をそれぞれ検出し、当該内輪側に係る電気モータの電流値と、内輪基準値BIを比較することで、内輪側に係るキャンバ角調整装置90の応答性低下を検出し、外輪側に係る電気モータの電流値と、外輪基準値BOを比較することで、外輪側に係るキャンバ角調整装置90の応答性低下を検出し得る。
(もっと読む)
スタビライザ装置
【課題】 消費動力を低減することができ、アクチュエータの小型化が可能なスタビライザ装置を提供する。
【解決手段】 コントローラ20は、操舵角センサ21で検出した操舵角と車速センサ22で検出した車速とに基づいて、走行車両に働く横加速度を推定演算して予測する。予測された横加速度に基づきFF制御にてモータ目標位置Stを演算する。モータ位置センサ23により検出した電動モータ19の現在位置Siとモータ目標位置Stとの偏差ΔSが不感帯の閾値eの範囲内となるように、電動モータ19の回転位置を制御する。これにより、コントローラ20は、車体が次の挙動を開始する前に可変剛性部4を目標剛性にする制御を開始する目標剛性制御手段を実現するものである。
(もっと読む)
能動型振動騒音制御装置
【課題】消音性能を向上させることが可能な能動型振動騒音制御装置を提供する。
【解決手段】いわゆる適応制御を用いるANC装置12では、前輪用サスペンション14aと後輪用サスペンション14bの特性の相違に基づく補正フィルタ76を用いて、前輪参照信号Sb又は後輪参照信号Sbd1を補正することで後輪打消音CSrを予測する。
(もっと読む)
スタビライザ制御装置
【課題】 アクチュエータの駆動に必要なトルクが過大となったときに、アクチュエータを停止させ、動力が無駄に消費されるのを防ぐようにする。
【解決手段】 車体の横加加速度(ロール量)、電動モータ25の回転位置(モータ実位置)から電流制御許可判断部40により電動モータ25の回転に必要なトルクを算定しつつ、この必要トルクがモータの最大トルクを越えているか否かを判断する。電流制御許可判断部40により電動モータ25が回転可能と判断した場合に、モータ位置制御部37から電流制御部38に指令電流を出力する。電動モータ25を回転できないと判断した場合には指令電流の出力を停止し、スタビライザ装置1の保持力により剛性を確保する。これにより、電力が無駄に消費されるような事態を回避し、エネルギ効率を高めるようにする。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる車両用制御装置を提供すること。
【解決手段】キャンバ角調整手段によりキャンバ角調整装置44が作動され後輪のキャンバ角が調整されて後輪にネガティブキャンバが付与される。ネガティブキャンバの付与により後輪に発生するキャンバスラストを利用して、車両の走行安定性を確保できる。また、キャンバ角調整手段により後輪にネガティブキャンバが付与される場合に、コーナリングフォース変更手段により前輪の等価コーナリングフォースが変更される。前輪の等価コーナリングフォースが変更されることにより、車両の操縦性の指標である操安キャパシティを変更することができ、車両の操縦性を制御できる。これにより、車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる。
(もっと読む)
車両
【課題】1つの駆動源を用いて駆動タイヤとサスペンションのそれぞれを作動させることができる車両。
【解決手段】駆動源8と、駆動源8から出力される駆動力によって回転可能な駆動輪3と、駆動源8から出力される駆動力によって作動するサスペンション7と、駆動源8と、駆動輪3またはサスペンション7との接続を切り替える切替え手段23とを有する走行装置4を備える車両を提供する。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】バネ上が高い周波数で小さく振動するときにも振動を吸収するようにスカイフック制御することが可能な減衰力可変ダンパの制御装置を提供することを課題とする。
【解決手段】ダンパ1aのバネ上速度が高いほどダンパ1aの減衰力が高くなるように減衰力制御量を設定し、バネ上速度の方向とダンパ1aのストローク速度の方向が同方向の場合に、減衰力制御量に基づいて減衰力を制御するスカイフック制御を行う減衰力可変ダンパ1の制御装置20とする。そして、ストロークセンサ14が検出するストローク変位に基づいて算出されるダンパ1aの振幅が小さくなるにつれて、ダンパ1aの減衰力が低くなるように減衰力制御量を補正することを特徴とする。
(もっと読む)
車両制御装置および車両制御方法
【課題】重心位置に偏りがある車両における制動時の安定性を向上させる技術を提供する。
【解決手段】車両制御装置1は、前輪および後輪の接地荷重を左右輪で異ならせるための接地荷重調節部としてのアクティブスタビライザ装置10と、目標ヨーレートを設定するための目標ヨーレート設定部102と、実ヨーレートを調節するためのヨーレート制御部104と、を備える。ヨーレート制御部104は、制動時に前輪および後輪それぞれの左右輪における接地荷重を異ならせて、前輪および後輪のうち制動力配分の大きい側に第1ヨーモーメントを、制動力配分の小さい側に第1ヨーモーメントと逆方向の第2ヨーモーメントを発生させ、第1ヨーモーメントと第2ヨーモーメントにより実ヨーレートを目標ヨーレートに近づける。
(もっと読む)
サスペンション制御装置
【課題】 車両の横加速度に応じて車輪の輪荷重を制御し、車両の安定性を高めるようにする。
【解決手段】 車体1には横加速度Ayを検出する横加速度センサ12を設ける。横加速度センサ12は、検出信号をコントローラ14に入力する。コントローラ14は、横加速度Ayの増加中には、前輪2の輪荷重をアップする、またはダウンさせにくくするように、前輪側の減衰力可変ダンパ6の減衰力特性をハード側に設定し、後輪側の減衰力可変ダンパ6の減衰力特性をソフト側に設定する。また、コントローラ14は、横加速度Ayの減少中には、後輪3の輪荷重をアップする、またはダウンさせにくくするように、前輪側の減衰力可変ダンパ6の減衰力特性をソフト側に設定し、後輪側の減衰力可変ダンパ9の減衰力特性をハード側に設定する。
(もっと読む)
車両用制御装置
【課題】タイヤの偏摩耗を抑制して、タイヤの寿命を向上させると共に車両の走行安定性を確保することができる車両用制御装置を提供すること。
【解決手段】車輪にスリップが発生すると判断される場合に、車輪のキャンバ角が第2キャンバ角(第1キャンバ角よりも絶対値が小さいキャンバ角)に調整され、車輪へのネガティブキャンバの付与が解除されるので、タイヤの偏摩耗を抑制できる。即ち、車輪にスリップが発生するとタイヤの摩耗が進行し易いので、車輪のスリップが発生する場合に、車輪へのネガティブキャンバの付与を解除することで、接地面積を広げてタイヤの偏摩耗を抑制できる。その結果、タイヤの寿命を向上させることができる。また、タイヤの偏摩耗を抑制することで、タイヤの接地面が不均一となるのを防止して、車両の走行安定性を確保できる。
(もっと読む)
車両用制御装置
【課題】車両の旋回特性を制御できる車両用制御装置を提供すること。
【解決手段】車両用制御装置100によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量に基づいてスタビリティファクタ演算手段により車両のスタビリティファクタが演算される。演算されたスタビリティファクタと別途定める基準スタビリティファクタとが比較手段により比較され、その比較結果に基づいて第1キャンバ角調整手段によりキャンバ角調整装置44が駆動され、前輪および後輪の少なくとも一つのキャンバ角が調整される。スタビリティファクタは車両の旋回特性を表すため、スタビリティファクタに基づいて車輪のキャンバ角を調整することにより車両の旋回特性を制御できる。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角をアクチュエータの駆動力により調整可能な車両に対し、消費エネルギーを抑制しつつ、車輪のキャンバ角が所定角度から変化することを抑制できる車両用制御装置を提供する。
【解決手段】車両の運動状態が所定の運動状態よりも緩やかであると判断される場合には、第1補正手段により、軸心O2及び軸心O3を結ぶ直線上に軸心O1が位置するように、ホイール部材93aを回転駆動して補正する。これにより、ホイール部材93aの回転を機械的な摩擦力により規制して、キャンバ角の変化を抑制しつつ、消費エネルギーの低減を図る。一方、車両の運動状態が所定の運動状態よりも緩やかではなく、高応答性が要求される場合には、第2補正手段により、ホイール部材93aの回転位置を初期位置に維持する制御を行う。これにより、消費エネルギーの低減を図りつつ、機械的な摩擦力を利用し易くして、キャンバ角の変化を抑制する。
(もっと読む)
車両用制御装置
【課題】バッテリの残存容量の低下やバッテリの劣化を抑制すると共に、車両の走行安定性を確保できる車両用制御装置を提供すること。
【解決手段】バッテリ状態判断手段によりバッテリが充電不足であるか又は劣化しているか判断される。一方、状態量判断手段により車両の状態量が所定の条件を満たすか判断される。判断の結果、車両の状態量が所定の条件を満たす場合には、バッテリが充電不足である又は劣化している場合に、通常状態調整手段によりキャンバ角が調整される場合よりも早いタイミングで、バッテリ低下状態調整手段によりキャンバ角調整装置が駆動され車輪のキャンバ角が絶対値が大きくなるように調整される。前後加速度や横加速度が小さなときにキャンバ角調整装置を駆動することで、瞬間的な負荷を減らして電力消費量を抑制し、バッテリの残存容量の低下や劣化を抑制できると共に、キャンバ角を確実に調整して車両の走行安定性を確保できる。
(もっと読む)
車両用制御装置
【課題】車両の旋回性能を向上させることができる車両用制御装置を提供すること。
【解決手段】旋回度増加期の車速がUS限界値を超え、ステア特性がアンダステアになる恐れがある場合には、左右の後輪2RL,2RRの旋回内輪のキャンバ角を旋回外輪のキャンバ角よりも大きくなるようにネガティブキャンバ方向へ調整することで、左右の後輪2RL,2RRの旋回内輪に発生するキャンバスラストを旋回外輪に発生するキャンバスラストよりも大きくして、ステア特性をオーバステア傾向にするためのヨーモーメントを車両1に作用させることができる。よって、アンダステアを抑制することができる。
(もっと読む)
1 - 20 / 287
[ Back to top ]