
Fターム[3E003AB01]の内容
Fターム[3E003AB01]の下位に属するFターム
曲部を有するもの(円筒、球状等) (78)
Fターム[3E003AB01]に分類される特許
1 - 20 / 72
物品搬送方法及び物品搬送装置
【課題】物品や容器のサイズ或いは容器内への物品の詰め合わせ状態などに応じた複数の物品の供給形態に対応可能な物品搬送方法及び物品搬送装置を提供する。
【解決手段】所定間隔毎に搬送される物品搬送コンベヤ2上の複数の物品1を吸着手段で吸着し、所定間隔毎に搬送される容器搬送コンベヤ4の第一コンベヤ5上の容器3に各物品1を載置して該容器3と共に搬送する際に、指定手段により第一の制御プログラムに切り替えられた状態では複数の物品1の夫々に対応した位置に配備された吸着具が各物品1を夫々吸着してまとめて容器3の一つに載置し、また、指定手段により第二の制御プログラムに切り替えられた状態では物品1を夫々吸着している吸着具の間隔を容器搬送コンベヤ4の第一コンベヤ5上の複数の容器3の間隔に合わせて該複数の容器3に夫々の物品を載置する。
(もっと読む)
物品投入設備

【課題】投入装置による集品容器に対する投入が失敗した物品の紛失を防止する。
【解決手段】物品13の出し入れが可能な上方開放部を有する集品容器12を搬送路に沿って搬送する搬送装置14と、搬送装置14の上方に設置され、搬送装置14上を搬送される集品容器12に対して、上方から物品13の落下投入を行う投入装置15と、搬送装置14と投入装置15との間に存在する搬送空間16の外側へ物品13が脱落することを防止するカバー20を設けた。
(もっと読む)
製函装置
【課題】 装置全体をコンパクトにすることができる製函装置を提供する
【解決手段】 開口した箱体の4つの壁面に連続した蓋フラップを折り畳んで蓋をする機能を備えた製函装置である。6軸の2つのロボットアーム11,12の先端に吸着具13,14を設ける。吸着具は、蓋フラップを折り畳むための平板13a,14aと、カートン20や小箱15を吸着する吸着ノズル13b,14bを有する。2つの吸着具で折り畳まれたカートンを開くとともに製函位置Aにセットし、また、小箱を箱体内に供給する。平板を所定の軌跡で移動させ、蓋フラップを順次折り畳み蓋を閉じる。蓋フラップを閉じたまま、1つの平板が箱体の壁面を付勢することで次段のテープ貼り装置に供給する。
(もっと読む)
袋装着装置
【課題】スクラップ片を生じさせることなく、少量の容器を連続的に袋状のフィルムで包装することに適した袋装着装置を提供する。
【解決手段】袋吸引移送部220は袋積載部210から一枚の袋10を吸着して待機位置まで移動させ、袋支持部230は袋10を案内し、待機位置にて袋10の開口部11側を解放した状態で袋10の閉口部12側を支持する。袋開放部240は袋10の開口部11側の両端部を吸着して袋10の開口部11を開かせ、袋移動部250は袋10の開口部11の両端部を挟んで把持する一対の把持部251、252を含み、一対の把持部251、252の間隔を拡げて、容器に向かって移動させ、一対の把持部251、252の位置と間隔を変化させることにより、容器の少なくとも一部に袋10を被せるように袋10の開口部11の両端部を容器の外周形状に沿って移動させる。
(もっと読む)
間欠型箱詰装置
【課題】被梱包品と添付書との梱包箱への挿入信頼性を向上し、単位時間当たりの挿入数を向上可能な間欠型箱詰装置を提供すること。
【解決手段】 短冊状の添付書をU字状にして被梱包品を包んで梱包箱に箱詰めする装置であって、梱包箱を順次移送する梱包箱移送コンベア105と、被梱包品を順次移送する被梱包品移送コンベア102とを併設し、被梱包品の挿入方向後端から被梱包品を梱包箱に押し込むプッシャ101と、両コンベア間に、被梱包品の挿入を遮蔽する位置に添付書を供給する添付書供給機104と、添付書と被梱包品移送コンベア102との間に位置し、突き当てることにより添付書に曲げグセを付ける添付書挿入板103と、プッシャ101を制御して被梱包品の挿入方向先端を添付書に当接させ、そのまま添付書と被梱包品とを梱包箱に挿入する制御部106と、を設けた間欠型箱詰装置100。
(もっと読む)
箱詰機における添付書類の供給方法およびその装置
【課題】添付書類を物品と共に確実にカートンに詰め込む。
【解決手段】成形枠44の入口部46に配置された添付書類10は、厚み方向から挟持手段60で挟持されて、入口部46から成形枠44内への上部通口58を通過させることで、挟持手段60より左右に延出する添付書類10の延出基部に折り癖が付与される。成形枠44で曲げ状態で保持された添付書類10は、折り癖の内側が物品14で押されて、物品14と共にカートン12に詰め込まれる。
(もっと読む)
カートニングマシン及び被収容物入りカートンの製造方法
【課題】被収容物が収容されていないカートンが流通してしまうことを阻止する。
【解決手段】カートニングマシンは、カートンCを搬送するカートンコンベア31と、カートンコンベア31に沿って被収容物Rを搬送する被収容物コンベア21と、被収容物RをカートンCに挿入する挿入装置41と、被収容物RのカートンCへの挿入完了地点EPよりも上流側に設けられてカートンC及び被収容物Rの検知を同時に行う相互検査センサ51と、仮想直交線VSLから挿入完了地点EPまでのカートンCの有無を検知するエリアセンサ55と、一旦停止した後はエリアセンサ55でカートンCが無いことが検知されるまではカートンコンベア31及び被収容物コンベア21の再起動を許可しない制御をする制御装置とを備える。而して、カートンCに対応する被収容物Rが被収容物コンベア21に存在しない状態でラインが稼働することを確実に回避できる。
(もっと読む)
豆腐のパック詰め装置
【課題】搬送コンベヤにより搬送される多数個の豆腐群を損傷させずに高加速度でパック詰めする豆腐のパック詰め装置を提供する。
【解決手段】コンベヤベルト30上の豆腐群B1,B2を包装パック搬送装置20上の所定位置に移動させて包装パックP…内に自由落下させるパック詰め動作において、豆腐群B1,B2を把持駆動機構(1対の把持プレート1B,1Dからなる)によって挟み込み、包装パック搬送装置20によって供給された包装パックP…上の所定位置に水平移動させて位置決めする。この際、豆腐群B1,B2は、1対の把持プレート1B,1Dによって挟み込まれ、豆腐群B1,B2の変形及び崩壊を防止できるので、多数個の豆腐群を一斉に把持して、包装パック群P1,P2に一斉に落下収納することによって豆腐のパック詰め工程の所要時間を短縮し、豆腐生産ラインの処理能力を高めることができる。
(もっと読む)
箱詰め装置
【課題】所定の異常が生じた場合に、ライン全体の処理能力が低下することを防ぐこと。
【解決手段】搬送路の一方の端部にある整列物品群の欠品及び物品の姿勢異常を検知する整列物品群異常検知器45と、箱待機位置に箱が待機しているか否かを検知する箱待機検知器24と、箱詰機構及び物品整列搬送装置6を制御する制御器31と、を備え、制御器31は、整列物品群異常検知器45で整列物品群の欠品及び姿勢異常の少なくともいずれかを検知した場合、又は箱待機検知器24で箱待機位置に箱が待機していないことを検知した後所定の条件が満たされない場合に、搬送路を搬送される整列物品群を搬送路の側方の物品押込位置へ押し出さないようにして、搬送路の一方の端部にある整列物品群を搬送路の他方の端部まで搬送するよう、箱詰機構及び物品整列搬送装置6を制御する。
(もっと読む)
箱詰め装置
【課題】押し込まれる物品が外装箱の開口の上縁に接触することを防止すること。
【解決手段】床板50を開放することにより形成された開口部から、下方に配置された外装箱に1以上の物品(整列物品)を押し込むよう押込部材を下降させる押込装置14と、押し込まれる物品を外装箱に案内する案内装置10とを備え、案内装置は、上面及び下面が開放された中空の逆N角錐台状(Nは3以上の整数)の仮想の枠体のN個の角部をそれぞれ構成するような形状のN個の案内片45を有し、該案内片を、前記基準位置において前記仮想の枠体を形成して前記押し込まれる整列物品を外装箱に案内するように、それぞれの稜線を含む実質的な鉛直面内で下方にそれぞれ揺動させるよう構成されており、外装箱は、所定のN角柱状であり、上面が開口し、且つ該上面のN個の辺に有するフラップが立っている状態で床板を開放することにより形成される開口部の下方に配置される。
(もっと読む)
物品移載装置および物品移載方法
【課題】箱体への物品の投入時に、物品が箱体の外にこぼれ落ちることを防止できる物品移載装置および物品移載方法を提供する。
【解決手段】送込みコンベヤ装置13の重量計33により投入口21より投入される物品16の重量を計測し、規定重量以下であった場合、物品16が投入される前に、ベルト体27が、ベルト体27の周回方向に所定長さだけ予め移動され、ベルト送り装置28に残す部分が少なくされる。これにより、物品16を移載するとき、ベルト送り装置28から送り出されるベルト体27の長さが短くなり、ベルト送り装置28は、通常より早く、ベルト体27の送り出しを終了する。よって、物品16は通常より早くベルト体27から落下し、このとき、ベルト体27上を物品16が滑ることがなく、略中央から物品16は落下し、箱体17からこぼれ落ちることを回避できる。
(もっと読む)
物品移載装置および物品移載方法
【課題】箱体への物品の投入時に、物品が箱体の外にこぼれ落ちることを防止できる物品移載装置および物品移載方法を提供する。
【解決手段】箱体17の収納容積の種別を箱センサ36,37により判別し、箱体17に既に収納されている物品16の体積を、箱体17の上方に位置した距離センサ35により検出されるデータにより求め、箱体17内の物品16の容積が箱体17の収納容積の一定の比率以上のとき、ベルト送り装置28によるベルト体27の送り出しが終了する前にチェーン駆動モータ24を駆動してチェーン23a,23bの移動を開始し、それに伴うベルト体27の一方の端辺部27aの周回を開始する。これにより、ベルト体27が箱体17内の一定の比率以上の物品16の上に載ることに起因して、ベルト体27に支持された物品16が箱体17の外部に放り出されることが回避される。
(もっと読む)
計数装置、及び、容器製造方法
【課題】積層体を構成している容器の数を正確、且つ、手軽に計測し得る計数装置を提供し、容器製造方法における作業効率を向上させること。
【解決手段】外方に突出する鍔部を外周に備えた容器を複数積層させた積層体における前記容器の数量を計測するための計数装置であって、前記積層体の側面における凹凸形状を該積層体の積層方向に沿って測定する光学変位計が備えられていることを特徴とする計数装置などを提供する。
(もっと読む)
挿入装置
【課題】耐久性が格段に改善され、挿入能力の向上を図り易い挿入装置を提供する。
【解決手段】挿入装置15は、スライド方向Cに沿って、カートンに対して進退される本体部30と、本体部30に軸着され、スライド方向Cに略直交する軸芯43廻りを正逆方向R1、R2に回動可能とされた回動部40と、回動部40に連結され、付属物に係合されるプレート部60と、本体部30と回動部40との間に、磁気的な反発力および/または磁気的な吸引力を発生させる磁気手段70と、磁気手段70に抗して、回動部40を逆方向R2に強制回動し、プレート部60を跳ね上げ状態とする規制手段80と、を備える。本体部30の前進に伴って、規制手段80が解除されるとともに、磁気手段70にしたがって、回動部40が正方向R1に回動され、跳ね上げ状態にあったプレート部60が、製品の上方において伏臥状態とされる。
(もっと読む)
ロボット、加工システム、及び加工品の製造方法
【課題】作業を省人化することが可能なロボット、加工システム、及び加工品の製造方法を提供する。
【解決手段】加工システム10は、物品を供給する物品供給部31と、被加工物を搬送する第1の搬送部22と、第1の搬送部22の下流側に設けられ、第1の搬送部22によって搬送された被加工物が載せられる作業台24と、予め教示された作業動作に従って、作業台24の上に載せられた被加工物に物品を用いた作業を施すロボット20と、作業台24の下流側に設けられ、ロボット20により作業が施された被加工物を搬送する第2の搬送部26とを備える。
(もっと読む)
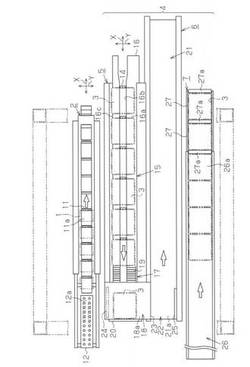
遊技盤の梱包ライン
【課題】緩衝材で囲繞した遊技盤を効率的に包装箱へ収納可能な遊技盤の梱包ラインを提供する。
【解決手段】上方が開口する包装箱11を収納待機位置P2に搬送する箱搬送コンベヤ12の上方に、遊技盤13を収納待機位置P2に臨む包装箱11の開口上方の箱収納位置P3に搬送する可動コンベヤ29が配設される。可動コンベヤ29は、搬送位置と下降位置および退避位置の間を移動し得る。箱収納位置P3に搬送した遊技盤13の下面を支持可能な支持部材36,36は、遊技盤下面の支持を解除する解除位置に移動し得る。可動コンベヤ29から支持部材36,36に受け渡された遊技盤13に緩衝材を配設した後、支持部材36,36を解除位置に移動すると共に可動コンベヤ29を退避位置に移動することで、収納待機位置P2に位置する包装箱11に遊技盤13を収納することができる。
(もっと読む)
箱詰め装置
【課題】商品の収納姿勢(向き)、載置位置を変更し、商品の整列と収容効率が高い箱詰めを自動で行うことができる箱詰め装置を提供する。
【解決手段】吸着ユニットE1を介して商品Wを上方へ吊上げ、該吊上げた商品を所定の箱詰め位置に移動して下降させ、吸着を解除して箱に箱詰めを行う箱詰め装置において、前記吸着ユニットE1は、商品Wを吸着保持する吸着パッド5と該吸着パッド5を取り付けた軸部6とで構成され、前記軸部6の基部は鉛直方向且つ水平方向に移動可能な昇降基台7に回動可能に軸止され、更に前記軸部は傾動手段E2により所定角度傾動可能とした。
(もっと読む)
ワーク収容補助装置
【課題】ワーク排出路から排出されて落下するワークが収容ボックスに既に収容されているワークに直接衝突することを防止することができ、しかも、ワーク排出路から順次排出される多数のワークを収容ボックス内の一箇所に山積みとならないように分散させて収容することができるワーク収容補助装置を提供する。
【解決手段】ワーク排出路1の末端1aから排出されるワークWを収容ボックス2に収容する際に用いられるワーク収容補助装置であって、可撓性を有するシート10と、シート10をワーク排出路1の末端1aの下方にて傾斜した姿勢で垂れ下がるように支持すると共に、シート10の姿勢を、収容ボックス2の一端2a側から他端2b側に向かって下方に傾斜するように垂下がる第一姿勢と他端2b側から一端2a側に向かって下方に傾斜するように垂下がる第二姿勢とで変化させるシート支持装置20とを備える。
(もっと読む)
容器包装装置
【課題】 容器の包装工程を簡略化でき、シール部分のバラツキを防止することができる容器包装装置を提供することを目的とする。
【解決手段】 ガセット型包装袋で容器を包装する容器包装装置であって、ガセット型包装袋のうち、両側面部の上方における折りたたみ部の折り目を挟持して前端部の開口部を開いた状態となるように上方に持ち上げる側面上部固定手段と、両側面部下方における折りたたみ部の折り目を固定して包装袋の前記開口部を開いた状態に保持するとともに下部折り目の位置決めをする側面下部固定手段と、開口部が開いた状態の包装袋に開口部を通して容器を挿入した後、包装袋内から外へ離脱する容器挿入手段と、容器が挿入された包装袋の開口部の両側面部中央の内側への折りたたみ部の折り目を外側から押して折りたたむ側面折りたたみ手段と、脱気手段と、封止手段とを備えるものであることを特徴とする容器包装装置。
(もっと読む)
箱詰め装置及び箱詰め方法
【課題】 フラップ拡開手段が簡単な構造にでき、箱詰め装置の構造をシンプルにしてコンパクト化を図ること
【解決手段】 4つの上部フラップ6a〜6dが開いた状態の外箱5に対し、複数の小箱1からなる小箱群2を収納する箱詰め装置である。第1,第2上部フラップ6a,6bを抑え板を用いて拡開状態に保持し、ロボットアーム装置の吸着ヘッド41で保持した小箱群を傾けながら下降移動させて第3上部フラップ6cに対して当接させて押し広げ、次いで傾き方向を変えて小箱群にて第4上部フラップ6d押し広げることで、外箱の上方を広く開放する。その後、小箱群の姿勢を垂直に戻し、外箱の開口部位に合わせて下降移動させて収納するようにした。
(もっと読む)
1 - 20 / 72
[ Back to top ]