
Fターム[3E003CB01]の内容
容器詰包装操作 (2,738) | 制御手段及び制御対象 (190) | 電気的制御手段 (51)
Fターム[3E003CB01]の下位に属するFターム
演算機構を含む制御手段 (32)
Fターム[3E003CB01]に分類される特許
1 - 19 / 19
選果システム
【課題】青果物の選果作業に携わる作業者の人数を減らすことができる選果システムの提供を目的とする。
【解決手段】青果物6が載せられたトレイ8を待機位置P1まで搬送するトレイ搬送装置53と、包装箱9を待受位置P2まで搬送する箱搬送装置71と、待機位置P1にあるトレイ8を待受位置P2まで移送する箱詰装置72と、制御装置80と、を備え、制御装置80は、トレイ搬送装置53によってトレイ8を待機位置P1まで搬送し、箱搬送装置71によって待受位置P2とトレイ8が詰められる第一の箱詰位置S1、第二の箱詰位置S2とが一致するように包装箱9を待受位置P2まで移送した後に、箱詰装置72によってトレイ8を待受位置P2に移送するように制御する。
(もっと読む)
箱詰め装置

【課題】必要数に満たない物品が外装箱の内部に収容されるのを防止することができる箱詰め装置を提供する。
【解決手段】箱詰め装置10は、複数の物品Tと同数の物品検出センサ102を有し、物品押出し装置16による押出し動作の最中に複数の物品Tのそれぞれの有無を物品検出センサ102のそれぞれで検出する物品検出装置100と、警報を発生する警報発生装置とを備え、制御装置は、物品検出装置100が検出した物品Tの数が複数の物品Tの必要数に満たないときに、警報発生装置に警報を発生させる警報処理を実行する。
(もっと読む)
カートニングマシン及び被収容物入りカートンの製造方法
【課題】被収容物が収容されていないカートンが流通してしまうことを阻止する。
【解決手段】カートニングマシンは、カートンCを搬送するカートンコンベア31と、カートンコンベア31に沿って被収容物Rを搬送する被収容物コンベア21と、被収容物RをカートンCに挿入する挿入装置41と、被収容物RのカートンCへの挿入完了地点EPよりも上流側に設けられてカートンC及び被収容物Rの検知を同時に行う相互検査センサ51と、仮想直交線VSLから挿入完了地点EPまでのカートンCの有無を検知するエリアセンサ55と、一旦停止した後はエリアセンサ55でカートンCが無いことが検知されるまではカートンコンベア31及び被収容物コンベア21の再起動を許可しない制御をする制御装置とを備える。而して、カートンCに対応する被収容物Rが被収容物コンベア21に存在しない状態でラインが稼働することを確実に回避できる。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 第1の所定個別回転方向において、第1の基準角度位置から第1の単位角度より小さい所定角度の位置までの第1の所定角度範囲における速度より所定角度の位置から第1の単位角度の位置までの第2の角度範囲における速度が低くなるように第1及び第2の羽根車21、22を回転させる。
(もっと読む)
箱詰め装置の物品投下構造
【課題】箱詰めされる物品を投下装置の物品載置部材上に複数並ぶように移送する移送装置の構成を簡素化する物品投下装置を提供する。
【解決手段】第1及び第2の羽根車21、22のいずれか一対の羽根の上に物品A1,A2が移動方向に並ぶようにベルトコンベア1の搬送速度を、物品が並ぶ順番に応じた速度に順次低下させるよう構成する。
(もっと読む)
餃子のトレー詰めのための起立姿勢保持装置
【課題】成形されてコンベアにより搬送される餃子を、コンベアの送出側の転回端部から起立姿勢に保持してトレー内に落とし込む異ができ、起立姿勢でのトレー詰めを容易に可能にする餃子のトレー詰めのための起立姿勢保持装置を提供する。
【解決手段】
餃子成形機Mから送出される餃子Gを、起立姿勢で搬送する餃子送りコンベア1と、コンベアの前端部1aの回転送行部11と対向して所要の高さ位置から下方向きの縦送行部31を含む起立姿勢保持を兼ねる落とし込み手段3と、餃子送りコンベア1の下方において、トレー供給部5より供給される餃子包装用のトレーTを餃子送りコンベア1の前端部からの落とし込み位置の下方に間欠的に送るトレー送りコンベア4とを設け、餃子送りコンベア1により送られる餃子Gを起立姿勢のままトレーTに落とし込み収納できるようにする。
(もっと読む)
包袋への被包装物搬入装置
【課題】クランプに吊り下げて開口する包袋内に被包装物を落下充填する場合の、袋底面に対する被包装物の落下衝撃を緩衝する。
【解決手段】搬送コンベヤ21から、誘導ベース32とシャット板34とからなる一次緩衝機構30内に被包装物19を運びいれ、第1直動モータ40により、枢支軸31を支点に前記一次緩衝機構30を鉛直線90に沿う位置まで回転垂下させたあと、クランプ13に吊り下げた包袋10内に、前記シャット板34を開放して被包装物19を投入する。この場合壁板51と、挟持板52とで被包装物19を受け止め、その後の挟持板52の下降で被包装物19を包袋10の底に誘導する。
(もっと読む)
箱詰め装置
【課題】棒状体2を容器3に詰める箱詰め装置1において、設置面積の拡大を必要とせず、かつ低コストで、棒状体2の傷みやすさや詰込み状態の嵩高のようなバラ詰み方式の欠点を抑制する。
【解決手段】箱詰め装置1は、箱詰め位置5にて容器3の左端が右端よりも上方に配されるように容器3を水平方向に対して傾斜させる容器傾斜手段22を備える。これにより、傾斜した容器3に棒状体2が順次に供給されると、棒状体2は自重により容器3内を転がり、右下から左上に順次規則的に層状に詰まれていく。この結果、棒状体2が傷付いたり詰込み状態が嵩高になったりするのを抑制できる。また、容器傾斜手段22は、空気圧シリンダ26で容器3の一端を押し上げること等により簡便に構成できるので、設置面積を拡大することなく安価に設けることができる。
(もっと読む)
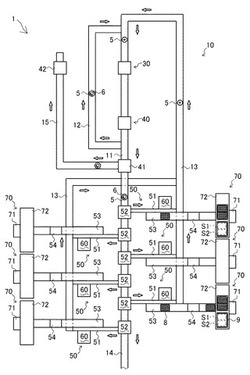
物品移送装置
【解決手段】 ケーサ3を構成するロボット6の作業ヘッド32は、X方向に移動する12本のステー42と、Y方向に移動する3本のシャフト43とが交差する位置に連結されるとともにグリッパ33を保持する36個の保持部材35とを備えている。
上記ステーはX方向パンタグラフ機構48によって移動し、該X方向パンタグラフ機構を構成する第4〜第8支軸56d〜56hには、リンク部材55の端部同士を同一軸上で回転するように保持する同軸状態(a)と、これを離隔させた位置で回転するように保持する異軸状態(b)とに切換える第1〜第5連結手段57a〜57eが設けられている。
この連結手段により、同軸状態とした際における隣接するグリッパの間隔と、異軸状態とした際における隣接するグリッパの間隔とを異ならせることができる。
【効果】 グリッパの間隔を任意に変更することができ、多彩な収納パターンに対応することができる。
(もっと読む)
箱詰め装置
【課題】 重量の比較的重い物品や比較的多数の物品を綺麗に整列させて確実に箱詰めする。
【解決手段】 予め定めた数の整列させる物品をその整列の長さ方向の両側から保持部9により挟み込んで保持し、保持部9により挟み込まれている物品を押し込み部14により上から押さえて外装箱2に詰める。押し込み部14は、整列した状態で保持部9により保持されている物品と物品との間に介在して保持部による挟み込む力を両側から受ける仕切り部57が設けられている。
(もっと読む)
物品箱詰め装置
【課題】 従来の物品箱詰め装置は、物品を定位置で積層するのに、簡単な構成で、処理スピードが速く、且つきれいに整列させた状態で積層できるものはなかった。
【解決手段】 コンベア装置1で順次搬送されてくる平面視矩形で薄形の物品Yをコンベア終端部1aから順次無停止状態で送出して、各物品Yをコンベア終端部1aの下方で待ち受ける収納箱X内に所定個数だけ積層状態で収納し得るようにした物品箱詰め装置において、コンベア終端部1aに、該コンベア終端部から送出される物品Yを乗り越させて減速させた後、表裏反転させて落下させるための物品減速反転部材2を取付けていることにより、物品Yを収納箱X内に、簡単な構成で、処理スピードが速く、且つきれいに整列状態で収納・積層できるようにした。
(もっと読む)
箱詰め装置及び箱詰め方法
【課題】物品群の保持への床の開閉動作の影響を排除することによって、箱詰め作業のトラブルを抑制する箱詰め装置及び箱詰め方法を提供する。
【解決手段】物品を整列させてなる物品群を整列方向から挟圧する挟圧ステップS3と、挟圧された物品群が載っている床を開放する開放ステップS7と、挟圧された前記物品群の上面に吸引ヘッドを接触させて物品群の上面を吸引して保持する保持ステップS4と、開放ステップS7後に吸引ヘッドを降下させることによって床の下方の外装箱に物品群を押し込む押し込みステップS8と、を有する、箱詰め方法であって、開放ステップS7の前に吸引ヘッドを物品群が床から離れる程度上昇させた状態とする上昇ステップS5を有する。
(もっと読む)
箱詰め装置
【課題】一度に2つの外装箱にそれぞれ複数の物品を押し込むことができる箱詰め装置であって、かつ物品の形状や剛性に因る制約を受けずに汎用性を有する箱詰め装置を提供する。
【解決手段】床板13Aを開閉駆動する床開閉装置13と、一対の挟圧板8Dの間に床板13A上に整列した物品からなる物品列を列方向から挟圧する挟圧装置8と、床板13Aが撤去された状態において挟圧された物品列の上面を押し込み板14Fによって下方に押して物品列を挟圧板8D間から下方に脱出させて、外装箱Cに物品列を押し込む押し込み装置14と、制御装置30と、を有する箱詰め装置であって、一対の挟圧板8Dの間に挟圧板8Dに並列する平板の仕切板15を有し、仕切板15の両側に物品列が挟圧される。
(もっと読む)
箱詰め装置
【課題】複数の収容個数の物品が並置された状態で整列コンベアに供給される場合において、収容個数の物品がそれぞれ収容部内の所定の位置に収容された状態を検出することができる箱詰め装置を提供する。
【解決手段】反転部16Eにおける一連の仕切板10の延伸端を結んで形成される円弧Mよりも外周側において収容位置Rにおける接線方向に延びる検出用光路L1,L2が複数水平方向に並列するようにして配設されている複数の遮光形検出器2A,2B,3A,3Bと、遮光形検出器2A,2B,3A,3Bの検出信号に基づいて無端軌道16を制御する制御装置と、を有する。
(もっと読む)
搬送装置およびこれを備えた箱詰め装置
【課題】整列不良の物品の束を下流工程に受け渡すことを回避して全体工程における効率化に寄与することが可能な搬送装置およびこれを備えた箱詰め装置を提供する。
【解決手段】箱詰め装置1は、第1バケット41と、第2バケット42と、背板44a,44bとをそれぞれ独立して駆動するように構成された、いわゆるトリプルループ構成において、検知部48が、商品Xの束の整列状態が不良であることを検知すると、制御部49が、商品Xの束を排出位置Rよりも下流側に設けられた排出部60まで搬送するように第1〜第3駆動モータM1〜M3を制御し、また、第1横送り機構51が作動しないように制御している。
(もっと読む)
多列分配装置
【課題】どのような条件下でも小袋をアタッチ間の一定な位置に投入でき、投入姿勢が小袋の縦横比に影響されることがなく、小袋が種々の幅のものでも専用部品を用いることなく容器に投入でき、容器内径に即した適切な寸法の小袋を容器内へ位置ずれすることなく正確に投入できる多列分配装置小袋を提供する。
【解決手段】多列分配装置は、分割された小袋10を、単位個数毎に搬送吸着手段16によって吸着して分配コンベア部14の搬送開始箇所14aに搬送投入する吸着型小袋搬送部18と、分配コンベア部14によって搬送された複数の小袋10を投入吸着手段20によって吸着して、小袋10投入位置の複数容器12のそれぞれに投入する吸着型小袋配布部22とを備える.
(もっと読む)
包装装置
【課題】物品の包装において、包装のための箱材の内側フラップが該箱材の内側に折り曲げられることに起因する不良を早期かつ確実に発見する。
【解決手段】包装装置200は、複数の折り曲げ部を有する板状の箱材を折り曲げて箱形状に成形しながら該箱材によって物品を包装する。包装装置200は、箱形状にされる途中の状態にある箱材10の内側に物品20を押し込む押し込み機構75と、箱材10の内側フラップ1が規定角度を超えて折り曲げられた異常が発生したことを検知するセンサ82と、箱材10の内側フラップ1と外側フラップ2とが重なる部分に糊を提供する糊提供部30と、箱材10の外側フラップ2を内側フラップ1に押し付けて外側フラップ2を内側フラップ1に接着させる押圧機構50と、センサ82によって異常の発生が検知された際にエラー処理を実行するエラー処理部84とを備える。
(もっと読む)
箱詰装置、整列ユニット、および整列方法
【課題】装置のスループットを低下させることなく複数の包装商品を立体的に整列させる整列ユニット、整列方法、および箱詰装置を提供する。
【解決手段】箱5の姿勢を開口面6cが横向きとなる姿勢から上向きとなる姿勢に変更する場合において、(1)まず、シリンダ325によってロッド326を矢印AR10方向に伸ばすことにより、イス部310に保持された箱5は回転軸322を中心に回動する。これにより、箱5の開口面6c側の高さ位置が、奥側の高さ位置と比較して高くなる。次に、シリンダ335によってロッド336を矢印AR11方向に縮めることにより、箱5は回転軸332を中心として回動する。これにより、箱5が、開口面6cを上向きとする姿勢に変更される。
(もっと読む)
棒状物品の入替装置
【目的】穴部の間隔が相違する2種類のケースの間で小径のドリルをはじめとする棒状物品を両端の向きを逆にして移し替えることのできる装置の提供。
【構成】穴部2A,3Aの間隔が相違するケース2,3を配置するテーブル1、その上方に設けられる作業ユニット6,7、その両者を寄り合う方向と離間する方向とに移動させる手段を備える。作業ユニット6,7は、棒状物品の一端を摘む開閉自在な把持部31を形成する複数のフィンガ23、これを保持するフィンガホルダ24、これを揺動させて各フィンガの把持部31を下向きの状態と横向きの状態とに切り替える流体圧シリンダ25を備える。作業ユニット6の各フィンガ23は、把持部31の間隔がケースの穴部2Aの間隔と一致する状態でフィンガホルダ24に固定され、作業ユニット7の各フィンガ23は、把持部31が横向きの状態から下向きの状態に切り替わるとき間隔が変換される。
(もっと読む)
1 - 19 / 19
[ Back to top ]