
Fターム[3E030BB02]の内容
包装位置への供給(容器の供給) (3,570) | 容器の繰り出し(繰り出し手段) (330) | 吸引によるもの (153)
Fターム[3E030BB02]に分類される特許
1 - 20 / 153
充填包装機の枚葉袋2枚取り検知装置
【課題】枚葉袋の充填包装機に於いて、給袋装置から受渡し装置にて把持装置に供給するに際に、枚葉袋の2枚取の有無を検知してそれによって生ずるトラブルを防止することを目的とする。
【解決手段】給袋装置から受渡し装置にて把持装置に供給するに際し、受渡し装置において枚葉袋を挟持した際の挟持ブロック間の隙間を検出するセンサーと、その検出信号に基づいて枚葉袋の2枚取の有無を判断し、それ以降の諸動作を制御する
(もっと読む)
袋装着装置

【課題】スクラップ片を生じさせることなく、少量の容器を連続的に袋状のフィルムで包装することに適した袋装着装置を提供する。
【解決手段】袋吸引移送部220は袋積載部210から一枚の袋10を吸着して待機位置まで移動させ、袋支持部230は袋10を案内し、待機位置にて袋10の開口部11側を解放した状態で袋10の閉口部12側を支持する。袋開放部240は袋10の開口部11側の両端部を吸着して袋10の開口部11を開かせ、袋移動部250は袋10の開口部11の両端部を挟んで把持する一対の把持部251、252を含み、一対の把持部251、252の間隔を拡げて、容器に向かって移動させ、一対の把持部251、252の位置と間隔を変化させることにより、容器の少なくとも一部に袋10を被せるように袋10の開口部11の両端部を容器の外周形状に沿って移動させる。
(もっと読む)
包装機用袋箱
【課題】いわゆるリサイクル機構を備えた、例えばロータリー式包装機へ包装袋を供給する際に、吸盤による空の動作に伴う包装袋の位置ずれが発生する。
【解決手段】積層された包装袋10を収納する格納箱の上部に、包装袋10を吸着して持ち上げて包装機に供給する吸盤44を配置し、駆動モータによって回動する駆動軸41から吸盤44に回動力を伝達するクランク機構42を備え、駆動軸41とクランク機構42の間に、駆動軸41の駆動力を伝達、遮断する駆動伝達シリンダー47と、吸盤44が包装袋10側に回転しようとする力を固定するための固定シリンダー49を備えている。
(もっと読む)
梱包装置
【課題】梱包作業の効率化を図ること。
【解決手段】実施形態に係る梱包装置は、供給ステーション、右エンドエフェクタおよび左エンドエフェクタ、右アーム部および左アーム部、組立ステーションを備える。供給ステーションは、折り畳まれた状態の段ボールが載置される場所である。右エンドエフェクタおよび左エンドエフェクタは、物体を吸着する吸着部を備える。右アーム部および左アーム部は、それぞれ右エンドエフェクタおよび左エンドエフェクタを備える。組立ステーションは、立体的に展開された段ボールが載置される場所である。梱包装置は、供給ステーションへ載置された段ボールの両側面を各吸着部を用いて吸着し、右アーム部および左アーム部を用いて段ボールを展開させ、組立ステーションへ移動させる。
(もっと読む)
ロータリー式包装機
【課題】従来は、ロータリー式包装機の1工程において、袋口にヘラを挿入して拡開し、袋口のシートを掴み爪で掴み直す必要があったため、包装スピードを上げることができず、包装効率が悪かった。
【解決手段】ロータリー式包装機にガセット袋2を供給する給袋機構が、ガセット袋2を供給する袋供給コンベアと、この袋供給コンベアからガセット袋2を取り出す袋取り機構21と、袋口を開口して次工程に受け渡す袋渡し機構22と、袋口を拡開する一対のヘラ62,63を備えた拡開機構23と、拡開機構23で拡開したガセット袋2の上部をクリップ7で挟持してロータリー式包装機のクランプに受け渡す受け渡し機構24と、を備えている。
(もっと読む)
カートンマガジン、カートンハンド及び文書積載挿入装置
【課題】カートンマガジンからのカートン取出時に、カートンの取出を確実に行うことのできるカートンハンドを得る。
【解決手段】カートンを積載収納するカートンマガジンのカートン取出口に搬送されるカートンの一面を吸着保持するための固定吸着パッドと、カートンの一面を吸着すると共に、固定吸着パッドよりその先端が突出して設けられ、かつ、固定吸着パッドの先端と同等の位置まで退縮可能な可動吸着パッドとを備える。
(もっと読む)
給袋自動包装機
【課題】袋を充填位置からシール位置へ移送する新たな機構を採用して小型化・省スペース化を図る給袋自動包装機を提供すること。
【解決手段】袋(h)を充填位置(a)に待機する第1アーム31に備えた第1グリップ(g)又は第2アーム45に備えた第2グリップ(g′)に供給する給袋手段10と、開口部(i)を上にして袋を吊り下げ状に支持する第1グリップ(g)又は第2グリップ(g′)を充填位置(a)とシール位置(b)との間で移動自在に設けた移送手段30と、第1グリップ(g)又は第2グリップ(g′)により支持された袋に所定量の被包装物を充填する充填手段55と、被包装物が充填された袋の底部を押し上げ若しくは袋の底部に振動を付与するように設けた底上げ装置60と、被包装物が充填された袋の開口部をヒートシールするシール手段65と、袋詰めされた製品を機外へ排出するベルトコンベア70とからなる。
(もっと読む)
ロータリー式包装機及び同包装機に対するガセット袋の供給方法
【課題】包装機に対するガセット袋の供給方法を見直し、包装効率を上げることができるロータリー式包装機を提供する。
【解決手段】複数枚のガセット袋3を溜めて後の機構に供給する袋箱4と、袋箱4上に配置されて、ガセット袋3を取り出す袋取りアーム12と、袋取りアーム12に隣接して配置され、この袋取りアーム12からガセット袋3を受け取って持ち上げて袋口を開口する袋渡しアーム14と、袋渡しアーム14上に配置され、昇降動可能で、袋渡しアーム14が持ち上げたガセット袋3の袋口内に挿入して拡開する一対のヘラ41を備え、拡開したガセット袋3を前記ヘラ41で保持して包装機側に移行する拡開機構15と、を備える。
(もっと読む)
包装機の包装袋供給装置
【課題】袋口の大きさに対して被包装物がタイトな状態にも対応することができ、包装袋の高さと左右位置を所定位置に揃えた状態で包装機に安定供給することができる包装袋供給装置を提供すること。
【解決手段】基準位置から回転アームにより持ち上げた包装袋の内側縁までの距離を中継位置の手前にて計測する左右補正用計測センサーと、基準位置から包装袋の内側縁までの基準距離に対応する計測センサーの閾値を予め設定し、計測センサーによって包装袋毎に計測される測定値に対応する閾値と基準距離に対応する閾値との差を演算することにより包装袋の位置を左方又は右方へ修正する補正値を決定する制御部とからなる袋の左右位置補正手段を設け、回転アームにより持ち上げられた包装袋が挟着片によって挟持される前に、補正値に基づいて回転軸を左方若しくは右方へ移動させることにより、包装袋の内側縁の位置を基準距離に合致させるように補正する。
(もっと読む)
容器の包装装置
【課題】 台紙に貼着された筒状シュリンクフィルム製の袋の内部に容器を機械的にスムースかつ正確に挿入して包装すること。
【解決手段】 容器3の包装装置10であって、袋2の上側フィルム2Bを持ち上げて該袋2の一端を開口させるチャック装置50と、チャック装置50が開いた袋2の開口に差し込まれて該開口を広げる先細状ガイド60と、袋2の開口に差し込まれて該開口を広げているガイド60の案内路65に容器3を押し込み、該容器3を該案内路65を介して該袋2の内部に挿入する押し込み装置70とを有してなるもの。
(もっと読む)
製函・梱包装置
【課題】折りたたまれた段ボールシートを筒状に製函し、梱包対象物に被せる一連の動作を機械的に行うことにより、梱包作業効率を上げることが可能な製函・梱包装置を実現する。
【解決手段】収容された段ボールシートを取り出し、組み立て、梱包対象物に被せる製函・梱包装置であって、段ボールシートを取り出し保持する保持部23と、第1アーム261と、前記第1アームの途中に回転軸により枢設された第2アーム262よりなる連結アーム26とを具備し、前記第1アームは、一端が前記保持部と連結され、他端が回転用レール32上を移動可能な機構を有し、前記第2アームは、一端が前記第1アームと連結され、他端が駆動レール31上を移動可能な機構を有し、前記駆動レールは、直線状であり、前記回転用レールは、直線状の部分及び屈曲した部分を有する。
(もっと読む)
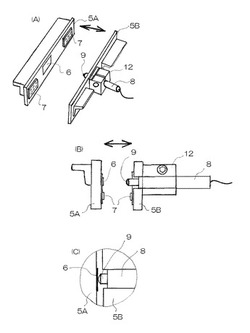
ベルト袋詰め装置
【課題】ベルトを袋詰めする作業の自動化が図れ、且つベルトを袋詰めする作業をより迅速に行うことができるベルト袋詰め装置を提供する。
【解決手段】ベルト用搬送機構4は、ベルト2を待機位置P5に搬送する。ケース5は、包装用袋3へのベルト2の挿入を案内するように構成されており、待機位置P5においてベルト2を収容している。袋供給機構6は、包装用袋3を挿入位置P2に供給する。ベルト挿入機構8は、挿入位置P2に配置された包装用袋3内へケース5とともにベルト2を挿入し、ケース5は包装用袋3から取り出す。袋シーリング機構9は、包装用袋3の開口部3aを加熱溶着して密閉する。
(もっと読む)
給袋自動包装機
【課題】袋を充填位置からシール位置へ移送する新たな機構を採用すると共にガス充填包装を可能とし、小型化・省スペース化を図る給袋自動包装機を提供すること。
【解決手段】袋を充填位置に供給する給袋手段10と、袋(h)を吊り下げ状に支持するグリップを充填位置(a)とシール位置(b)との間で移動自在に設けた移送手段30と、その袋に所定量の被包装物を充填する充填手段65と、被包装物が充填された袋の開口部をヒートシールするシール手段と、袋詰めされた製品を機外へ排出する排出コンベア90を備えた自動包装機において、
移送手段30は、第1グリップ(g)を水平面上で四角形軌跡運動をさせる上方の四角形軌跡運動機構31と、第2グリップ(g′)を水平面上で四角形軌跡運動をさせる下方の四角形軌跡運動機構50とを近接させて配置していて、上方と下方の四角形軌跡運動機構による一連の動作を同期するように制御する。
(もっと読む)
袋詰め包装機における袋底支持方法及び装置
【課題】必要な包装処理工程及び工程間のみ袋底を支持し、支持の必要がない工程で用いられる各種装置の設置及び位置調整範囲の自由度を広げ、それらの装置と袋底受け台装置との干渉を回避する。
【解決手段】工程Vの停止位置で固定側袋底受け台Aを上昇位置まで上昇させて停止中の袋10の袋底を支持した状態で被包装物を充填する。次工程VIからVの停止位置に復帰移動してきた可動側袋底受け台Bを下降位置から上昇位置まで上昇させて、受け台Aと略同じ高さ位置で袋底を支持させ、受け台Aを下降位置へ下降させる。回転テーブル4が回転すると、受け台Bを袋底を支持したまま袋10と同調移動させる。袋10が工程VIの停止位置に止まると、固定側袋底受け台Cが下降位置から上昇し、受け台Bと略同じ高さ位置で袋底を支持する。受け台Bが下降位置へ下降して、工程Vの停止位置へ復帰移動する。
(もっと読む)
給袋装置
【課題】複数種類の異なる袋を選択しながら包装装置に供給することができるようにすることで、複数種類の製品(被包装物)を1台の包装装置にて任意設定数量だけ交互に繰り返して包装することができる給袋装置を提供する。
【解決手段】給袋装置2は、複数種類の異なる袋を各々収納する複数連の袋箱4が並設され、この複数連の袋箱4の先端部に、袋の一端を吸着する吸盤14を設け、前記吸盤14を揺動するための揺動リンク機構を備え、前記複数連の袋箱4が水平移動機構により水平移動可能であって、複数連の袋箱4の各々が所定の位置に水平移動して複数の異なる袋を任意設定数量だけ、交互に繰り返して包装装置1に供給する。
(もっと読む)
間欠移送式縦型袋詰め包装方法
【課題】間欠移送される袋内の液状物の袋外への飛び出しや袋のシール不良の発生を防止し、包装処理の生産性を向上させる間欠移送式縦型袋詰め包装方法を提供する。
【解決手段】グリッパ4が第1接近位置に位置し、袋口10が平面視略円形になった状態で移送されてきた袋6を停止し、袋6にノズル40を介して液状物36を充填する。液状物36の充填中、特に充填終了間際あるいは充填終了後に、ノズル40の移動の障害とならないタイミング及び範囲で左右のグリッパ4が互いにさらに接近し、第2接近位置に位置する。袋口10が平面視で袋6の幅方向が短軸となる略楕円形となり、それぞれのサイドシール境界部12を挟んで左右の部分が大きな鈍角θをなして略平らと言って良いほどの形状になる。袋6は袋口10が略楕円形の状態のまま、袋6の緊張工程を実行する次の停止位置へ略袋の幅方向に移送される。
(もっと読む)
シート状電極の製袋自動包装機
【課題】ロール状フィルムから1枚ずつ製作されるセパレータとしての袋にシート状電極を自動的に封入することができる生産効率の高い製袋自動包装機を提供すること。
【解決手段】ロール状包装用フィルムから一枚ずつの袋(g)を製作する製袋部10と、多数の小穴が形成されたベルトの下面に真空吸引器を配置した搬送ベルトコンベア38と、製袋部の切り離し用ベルトコンベア27上の袋を搬送ベルトコンベア38上に間欠移送する受け渡し用ベルトコンベア48と、供給されるシート状電極(m)を収めて袋(g)に挿入する多数のガイド70を夫々進退及び左右に開閉自在に設け、搬送ベルトコンベア38のベルトと同期して間欠回転するガイドベルトなどの外周に各ガイドのベース63を取り付けたガイドトラック60と、シート状電極(m)が収納された袋(g)の開口部(h)近くの所定箇所にポイントシールを施すポイントシール手段80とからなる。
(もっと読む)
カートニングマシン
【課題】生産性を向上させつつ扁平に折り畳まれたカートンの位置決めを正しく行うことができるカートニングマシンを提供する。
【解決手段】カートニングマシン1は、扁平カートンCfを重ねて収容するカートンマガジン11と、カートンマガジン11から引き出された扁平カートンCfを搬送する搬送コンベア13と、搬送コンベア13による搬送の慣性で移動を続け得る扁平カートンCfの移動を止めて箱形に開く位置を決定する位置決めガイド14と、搬送コンベア13に搬送されている扁平カートンCfを吸着保持して位置決めガイド14まで届けるバキュームコンベア15とを備える。而して、生産性向上のために搬送速度を上昇させても、バキュームコンベア15が扁平カートンCfを吸着保持して位置決めガイド14まで届けることで、搬送コンベア13による搬送の慣性で扁平カートンCfが飛ばされ跳ね返ることを回避でき、位置決めを正しく行うことができる。
(もっと読む)
ダンボール箱組立て装置
【課題】板状ダンボールからダンボール箱を組み立てるまでの作業を自動化して省人化でき、作業者起因の組み立て能率の低下を無くし、組み立て能率の向上を図る。
【解決手段】板状ダンボール搬送機構12は、最上位に載置された板状ダンボール100bの高さを所定高さに設定する。吸着旋回機構13は、第1側面101aに負圧を発生させて旋回させ、角筒状ダンボール100cを成形する。ダンボール移動機構14は、角筒状ダンボール100cを吸着旋回機構13とともに移動させる。これに伴い、第1〜第4底フラップ折り曲げ機構(15〜18)が第1〜第4底フラップ(101a〜101d)を折り曲げ、テープ貼り付け機構19がテープ106をローラ(23b、23c)で押し付けて底面を封止する。箱状に組み立てられたダンボール箱100bがダンボール箱排出部20から排出される。
(もっと読む)
箱予備成形方法および箱予備成形装置
【課題】 三角形状の天面フラップを有する箱の予備成形を自動的に行えるようにし、かつ省スペース化を可能にする。
【解決手段】 箱シート材100を天面フラップの頂点を上にした状態で収容するマガジン120から箱シート材100を吸着保持部2により一枚ずつ取り出し、吸着保持部2を水平軸25回りに鉛直面内で旋回させることにより、折曲げ加工ステーションQに箱シート材100を移動させて、箱シート材100の第1、第2の天面フラップ対102a、102b;103a、103bを内側に折り曲げ、吸着保持部2を鉛直面内で旋回させることにより、箱シート材100の天面フラップの頂点を搬送方向に向けた状態で、マガジン120および折曲げ加工ステーションQの下方のバケットコンベア15の搬送面において、マガジン120および折曲げ加工ステーションQの間の中間位置に導入する。
(もっと読む)
1 - 20 / 153
[ Back to top ]