
Fターム[3E054FE03]の内容
包装位置への供給−物品の供給 (7,769) | 物品の取扱い(その他) (184) | 仕分け (49)
Fターム[3E054FE03]の下位に属するFターム
サイズによるもの (21)
Fターム[3E054FE03]に分類される特許
1 - 20 / 28
選果システム
【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
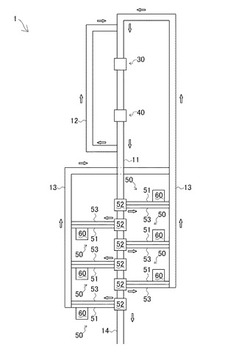
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
選果システム

【課題】表面が柔らかい青果物でも容易に箱詰めできる選果システムを提供する。
【解決手段】青果物6を載置した載置台5を上流側から下流側に搬送する主搬送手段が備えられ、主搬送手段には上流側から青果物6を載置台5上に載せる載置工程と、前記青果物6の品質を測定する品質計測工程と、前記品質計測工程の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程とが設けられる選果システムにおいて、パック詰め工程は、主搬送手段の下流部で等級や階級別に分岐して搬送する複数の選別ライン30が設けられ、各選別ライン30の側方には、載置台5上に載置された青果物6のがく片側を吸着してパック48まで搬送し、整列させて吸着を解除してパック48内に詰めるパック詰めロボット33を備えるものとする。
(もっと読む)
クロスネット自動包装機集中設置式選果包装選別装置
【課題】
桃、梨、リンゴ等の選果機械設備を利用しての選果作業に於いて、果物にクロスネットを装着する作業部門が他作業部門の作業効率に対して極めて効率が悪く、その結果に於いて、排出口増と包装機械設備の数による改善策の選択などがなされた。すなわち設備の充実方法として、選別機の大型化を招いた。処理能力の多少の改善は見られたが、設備費、人件費は倍額以上となり、選果コストは増大し、地域産業振興に大きなマイナスとなっている現在、一日も早い改善策が望まれる。
【解決手段】
クロスネット自動包装機集中設置装置を開発。さらに大面一面選別搬流排出コンベアー装置の開発により、選別機のコンパクト化だけでなくクロスネット包装箱詰め作業の単純作業化が実現、選別機械設備費の大幅削減、大幅省力化も実現できる自動包装箱詰めラインの構築を示し、選果コスト大幅減少可能な選果選別装置を提供できる。
(もっと読む)
長物野菜の箱詰め装置
【課題】箱詰め装置における部品点数の削減とコンパクト化とを図る。
【解決手段】本願発明の箱詰め装置1は、上向き開放状の箱体Bが載置される載置台2と、前記箱体B内に移送される一段分の長物野菜Mを並列に載せる移載棚3とを少なくとも備える。前記移載棚3は、前記長物野菜Mの載る棚部17が前記箱体B内に向かう斜め下向きの傾斜姿勢となり得るように、前記載置台2の上方にある横軸19回りに回動可能な状態で、前記載置台2の上方に配置する。
(もっと読む)
箱詰装置
【課題】包装物の厚みが変化した場合であっても、安定して包装物を一部重ねて搬送し、箱詰することができる箱詰装置を提供することである。
【解決手段】本発明に係る箱詰装置100においては、シールチェッカ700により包装物110の厚みが検出され、第1搬送部200により包装物110が搬送される。第2搬送装置400に集積部AR1が設けられ、集積部AR1において重ねあわされた包装物110が第2搬送装置400により搬送される。制御部301は、シールチェッカ700からの包装物110の厚みに基づいて第2搬送装置400の移動を調整する。
(もっと読む)
搬送装置
【課題】農作物の損傷を防止しつつ、農作物を容器内に適切に収容できる搬送装置を提供する。
【解決手段】搬送装置である規格内玉葱搬送手段51は、搬送手段55と、この搬送手段55を移動させる移動駆動手段56とを備える。搬送手段55の両端部には、搬送手段55からの玉葱Tを受け入れて下り傾斜方向に向けて搬送する端部搬送手段71を回動可能に設ける。端部搬送手段71の下方には規格内コンテナを保持する載置手段75が位置する。この載置手段75を回動させる回動駆動手段82を設ける。端部搬送手段71には距離検知手段91を設け、制御手段92が距離検知手段91の検知に基づいて回動駆動手段82および移動駆動手段56を制御する。
(もっと読む)
コンベア式物品仕分け装置
【課題】スペースの利用効率が高くいと共に仕分け効率も高いコンベア式仕分け装置を提供する。
【手段】仕分け装置は、平行に延びる複数対の供給コンベア1と、これら供給コンベア1の群と立体交叉した複数本の排出コンベア2と、供給コンベア1から排除された物品Wを排出コンベア2に移載する傾斜状の中継コンベア6とを備えている。一対の供給コンベア1で1本の中継コンベア6を共用している。排出コンベア2には、複数の中継コンベア6から放出された物品Wを分散して搬送するためのガイド体12が設けられている。多数本の供給コンベア1から1本の排出コンベア2に物品Wを集合させることができる。
(もっと読む)
包装容器に製品を挿入するピッキングライン並びに方法
本発明は、包装容器に製品を挿入するピッキングラインであって、搬送方向(x)における製品(14)の供給及び搬送のためのコンベヤベルト(12)と、コンベヤベルト(12)における製品(14)のポジションを特定するためのポジション画像処理系(20)を備えた少なくとも1つのピッカ(18)とが設けられている形式のものに関する。このような形式のピッキングラインにおいて本発明の構成では、搬送方向(x)で見て少なくとも1つのピッカ(18)の上流側に、品質画像処理系(16)が配置されていて、該品質画像処理系(16)は、コンベヤベルト(12)上を搬送方向(x)において品質画像処理系(16)のところを通過する製品(14)を、所定の品質特徴に関して検査するために働き、かつ搬送方向(x)で見て品質画像処理系(16)の下流側に続くピッカ(18)に伝えられる、製品(14)の把持又は非把持のための制御命令として役立つ品質情報と、製品(14)との対応付けのために働く品質画像処理系(16)である。 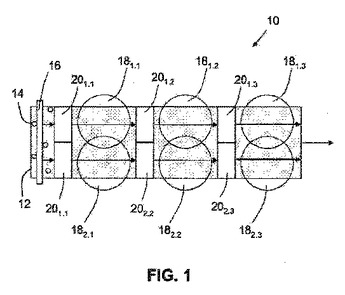 (もっと読む)
(もっと読む)
海苔束90度回転・整列方法及び装置
【課題】簡単な構造で海苔束90度回転動作と整列動作の速度を上げて高速処理に対応する。
【解決手段】集束装置から落下した海苔束8を受けて90度回転する受け板10と、上死点から下降する受け板10から90度向きを変えた海苔束8の積載時に停止し、載置後に始動して搬出する第1の搬送コンベヤ9を備えた海苔束90度回転装置と、搬送コンベア9で搬出される海苔束8を搬送し、整列時に停止し、整列後に海苔束を搬出する第2の搬送コンベヤ27と、進入する海苔束8を停止させるストッパ29と、海苔束8を叩いて整列する揃え板28と、進入してくる海苔束8を検知する進入センサ30を備えた整列装置と、第1の搬送コンベア9及び受け板10の停止動作及び始動動作の開始時間を計時する第1のタイマと第2の搬送コンベア27、ストッパ29及び揃え板28の停止動作及び始動動作の開始時間を計時する第2のタイマを備える。
(もっと読む)
箱詰装置
【課題】本発明は、個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に詰める箱詰装置において、袋の厚みの偏りによる不都合に対応することを目的とする。
【解決手段】個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に繰り返し詰める箱詰装置であって、前記各個別の袋の厚みを検出する厚み検出手段と、前記検出手段により検出される厚みに基づいて、前記一群の袋を前記規定サイズの箱に詰めることの適否を判断する判断手段と、記判断手段によって不適と判断される場合に、前記一群の袋のうち交換すべき袋を選択する選択手段と、を備えることを特徴とする。
(もっと読む)
選果施設
【課題】
フリートレイ式の選果施設において、箱詰め部で果実を取り出した空トレイを循環コンベアに排出しやすくすることを課題とする。
【解決手段】
果実トレイt2から果実fを取り出された空トレイt2を等階級選別コンベア部6の後工程の空トレイ受けコンベア部7の空きスペースに供給する構成にすることで、空トレイ受けコンベア部7はスペースが多く空いているため空トレイ搬送コンベア22から空トレイt2を円滑に供給しやすくすることができる。
(もっと読む)
農産物供給装置
【課題】第1のコンベアから仕分け排出された農産物が第2のコンベアに落下するときに、農産物に衝撃が加わるのを防止する。
【解決手段】第1のコンベア1と、この第1のコンベアの下方に設置された第2のコンベア2との間に配置され、前記第1のコンベア1から落下排出された農産物を一時的に貯留した後に前記第2のコンベア2に落下排出する農産物供給装置であって、前記第1のコンベア1から落下排出された農産物を貯留する貯留状態と該貯留した農産物を落下排出する排出状態とに切替可能な貯留部41と、前記貯留部から落下排出された農産物に当接した際に開拡するスリット部46cが形成された緩衝シート体46と、を有することを特徴とする農産物供給装置。
(もっと読む)
農産物箱詰め用の供給装置
【課題】搬送コンベアから搬送される所定個数の農産物を傷めることなく確実に収容できる箱詰め用コンベアを提供する。
【解決手段】搬送コンベア5から間欠的に進入する所定個数の農産物を箱詰め待機位置にて箱詰め装置に供給する箱詰め用コンベア6を備えた農産物箱詰用の供給装置6等であって、前記箱詰め用コンベア6は、水平位置と、搬送方向上流側を傾斜上方位置として傾斜する傾斜位置との間を移動可能とし、且つ該傾斜位置において前記搬送コンベアより進入した所定個数の農産物の搬送動作を停止させて収容可能する
(もっと読む)
整列装置
【課題】多数の農産物を1列に整列する際に、充填不足の解消を図ることができる整列装置を提供する。
【解決手段】供給コンベヤ2から供給される農産物A…を、第1の速度可変コンベヤ3と第1の整列コンベヤ4で前後に分散させながら1列に整列して搬送する。第1の整列コンベヤ4上を搬送される農産物A…間の間隔が所定間隔以下であることを第1の検出センサS1で検出している間は、第1の速度可変コンベヤ3を所定の搬送速度で駆動させておき、農産物A…間の間隔が所定間隔よりも長いことが検出された場合に、第1の速度可変コンベヤ3の搬送速度を第1の整列コンベヤ4よりも高速に増速して、農産物A…を、第1の速度可変コンベヤ3により第1の整列コンベヤ4上に押し込むようにして供給し、充填不足を解消する。
(もっと読む)
搬送体分岐装置
【課題】隣接する搬送体に載置された農産物同士を互いに干渉させることなく、所定の向きに保ったまま搬送することができる搬送体分岐装置を提供する。
【解決手段】搬送コンベヤ2が所定の向きに保って搬送するトレーBに載置された長物農産物Aの所定項目を計測領域bの計測装置4で計測し、その計測情報に基づいて、判定装置5で確定した農産物Aの仕分け先情報をトレーBの固有情報と関連付けて記憶する。その仕分け先情報に基づいて、農産物Aが載置されたトレーBを、選別領域cの搬出装置6により所定の向きに保ったまま分岐コンベヤ7aに搬出し、所定の向きに保ったまま搬送する。分岐コンベヤ7aから連絡コンベヤ7cに搬送されたトレーBから農産物Aを取り出して箱詰めした後、空のトレーBを連絡コンベヤ7cから帰還コンベヤ7bに搬出し、所定の向きに保ったまま搬送して、トレーBが載置されていた搬送コンベヤ2の周回経路上の場所に搬入する。
(もっと読む)
卵の定重量包装方法
【課題】 全ての規格卵、すなわち、MSサイズからLLサイズまでの規格卵を無駄にすることなく、必要数の定重量包装の卵パックを生産することができる卵の定重量包装方法を提供する。
【解決手段】 複数のグレード毎に選別された卵Eを選別容器Vに収容したのち、これをいったん一時ストック場所に一時ストックするとともに、卵Eの一包装単位の総重量が所定の重量範囲となるグレードの組み合わせと、そのグレード毎の卵Eの個数を決定して所定重量範囲の定重量包装の卵パックを生産するようにした。
(もっと読む)
搬送装置
【課題】 簡易な構成でありながら、複数の袋を整列させると同時に密封状態の検査も行うことが可能な搬送装置を提供する。
【解決手段】 箱詰め装置1では、受入装置4において、新たに搬入された最後端の物品X1を第2後端保持部材64の保持プレート64a・64bによって挟み込んで縦向きの状態で整列させながら、物品X1に圧力をかけている。コントロールユニット92が、保持プレート64aの吊り下げ部分に取り付けられた圧力センサ65における検出結果に基づいて物品X1のシール不良の検査を行う。圧力センサ65における検出結果が、所定の値よりも小さい場合、あるいは徐々に検出される圧力が低下していく場合には、この物品X1をシール不良と判定する。一方、所定の値を上回っており、検出圧力が低下していかない場合には、この物品X1を正常品として判定する。
(もっと読む)
集積梱包システム
【課題】 生産形態の切り換えが最小限の投資で可能な物品の集積梱包システムを提供する。
【解決手段】 上流側のシールチェッカ100から受け取った袋詰物品X
を複数個集積して梱包する集積梱包システムにおいて、手動タイプの集積装置200と同じく手動タイプの梱包装置300とをそれぞれモジュール化して結合する。結合に際しては、少なくとも一方が交換可能となるように、結合部が相手方の交換時にも物品X及び電気信号の受け渡しができる構成とする。
(もっと読む)
農産物箱詰用包装資材の供給装置および農産物の箱詰装置
【課題】農産物の箱詰の際に、トレイパックと緩衝シートを供給するのに一つの動作を行うと退避位置まで戻り、次の動作指令を待つというシーケンスでは休止時間が多くなるという問題があった。
【解決手段】受渡空間25内において、箱詰ロボット30の吸着式移載機構33の移動領域を仮想受渡位置25Aよりも上方とし、中仕切27及びトレイパック26を仮想受渡位置25Aに移動させる中仕切搬送装置36及びトレイパック取出吸着パッド34Eの移動領域を仮想受渡位置25Aよりも下方とし、吸着式移載機構33と中仕切搬送装置36及びトレイパック取出吸着パッド34Eが干渉しないようにした。
(もっと読む)
農産物の箱詰システム
【課題】箱詰のために指定された配列パターンのトレイパックに合わせて農産物を箱詰できる農産物の箱詰システムを提供する。
【解決手段】 排出・箱詰制御部1521が箱詰送出指示信号をトレイ送出制御装置18に出力すると、1包装単位をなす複数の農産を載せた受皿が箱詰待機位置に向け搬送し、1包装単位の農産物を箱詰めするトレイパックを指定するトレイパック指定信号も箱詰装置に出力する。箱詰装置は、複数種類のトレイパック中から指定された特定のトレイパックが箱詰位置の包装箱に装入されている状態で、作業ロボットが前記箱詰待機位置に一列に待機している複数の農産物を吸着保持して該トレイパックの列態様に合わせて移載する作業を当該トレイパックの列数分行い、その際作業ロボットが一度に吸着保持する農産物の個数を選択し、トレイパックに箱詰する際に吸着保持した複数の農産物の間隔を調整する。
(もっと読む)
1 - 20 / 28
[ Back to top ]