
Fターム[3E054GA01]の内容
包装位置への供給−物品の供給 (7,769) | 検知、制御(検知対象、位置) (298) | 物品 (174)
Fターム[3E054GA01]に分類される特許
1 - 20 / 174
物品整列装置
【課題】異なる形状の端部を有する物品を効率よく箱詰めすることを可能にする物品整列装置。
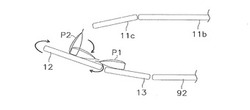
【解決手段】袋P2は、傾斜搬送部11cから停止中の第2の搬送装置12に落下する。袋P2の落下が、落下検知センサによって検知されると、第2の駆動部は制御される(第1の処理)。第2の駆動部は、袋P2が第2の搬送装置12のベルトコンベアに落下した後、第2の搬送装置12を駆動させる。このとき、袋P2は、上端を下流側に倒す。袋P2は、上端が下流側、下端が上流側に位置するように倒れる。これにより、袋P2は、第2の搬送装置12によって第2の平面状態で搬送される。第2の駆動部のモータの回転数が所定値に達すると、袋P2は、第3の搬送装置13に受け渡される。
(もっと読む)
物品搬送装置

【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
円柱体の回転位置決め装置
【課題】横倒させた円柱体Wを移動及び回転させながら、円柱体Wの回転位置決めを行うに際して、摩耗粉の発生を防止し、摩耗粉を原因としていた各種不具合を防止する。
【解決手段】レール部材3上の円柱体Wに当接する回転ローラ20と、回転ローラ20を回転駆動するローラ回転機構21と、回転ローラ20をレール部材3上の円柱体Wに接離させるローラ接離機構22と、回転ローラ20を送り爪5に同調させつつレール部材3に沿って移動させるローラ移動機構23とを有し、ローラ移動機構23には、回転ローラ20が円柱体Wに当接するよりも先に円柱体Wの一端部に当接して円柱体Wを送り爪5よりも搬送方向の下流側へ離反させる先行送り爪53が設けられており、この先行送り爪53には、回転ローラ20で回転される円柱体Wから転動力を受けて従動回転するロータ54が設けられている。
(もっと読む)
丁合い封書作製装置
【課題】封書を簡単に製造できる丁合い封書作製装置を提供する。
【解決手段】縦方向搬送部30は、下表紙3の左側縁部3Lに、接着材3aを縦方向Yに沿って塗布する下表紙−封入物接着材塗布部34と、接着材3aによって、下表紙3及び封入物4を接着して積層体5を作製する下表紙−封入物積層部35と、積層体5の下表紙3の右側縁部3Rに、接着材3bを縦方向Yに沿って塗布する第1下表紙−上表紙接着材塗布部37と、積層体5の封入物4の左側縁部4Lに、接着材4bを縦方向Yに沿って塗布する封入物−上表紙接着材塗布部38とを備え、左右方向搬送部40は、積層体5の下表紙3の縦方向Yの上下縁部3D,3Uに、接着材3cを左右方向Xに沿って塗布する第2下表紙−上表紙接着材塗布部43と、接着材3a,4b,3c,3dによって、上表紙2及び積層体5を接着して封書1を作製する積層体−上表紙積層部44とを備える。
(もっと読む)
選果システム
【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
搬送装置、カートニングマシン及び対象物入りカートンの製造方法
【課題】対象物の向きを調節可能な搬送装置、カートニングマシン及び対象物入りカートンの製造方法を提供する。
【解決手段】搬送装置20は、円筒状の対象物Rを軸線Rxまわりに回転可能に支持しながら搬送する対象物コンベア21と、対象物コンベア21に搬送されている対象物Rを軸線Rxまわりに回転させる回転手段25と、回転手段25による対象物Rの軸線Rxまわりの回転量を制御する制御装置60とを備える。カートニングマシンは、搬送装置20と、対象物Rを収容するカートンを搬送するカートンコンベアと、対象物Rの表面の基準位置が所定の方向を向くように調節された対象物コンベア21上の対象物Rを、カートンコンベア上のカートンに挿入する挿入装置とを備える。
(もっと読む)
カートニングマシン及び被収容物入りカートンの製造方法
【課題】被収容物が収容されていないカートンが流通してしまうことを阻止する。
【解決手段】カートニングマシンは、カートンCを搬送するカートンコンベア31と、カートンコンベア31に沿って被収容物Rを搬送する被収容物コンベア21と、被収容物RをカートンCに挿入する挿入装置41と、被収容物RのカートンCへの挿入完了地点EPよりも上流側に設けられてカートンC及び被収容物Rの検知を同時に行う相互検査センサ51と、仮想直交線VSLから挿入完了地点EPまでのカートンCの有無を検知するエリアセンサ55と、一旦停止した後はエリアセンサ55でカートンCが無いことが検知されるまではカートンコンベア31及び被収容物コンベア21の再起動を許可しない制御をする制御装置とを備える。而して、カートンCに対応する被収容物Rが被収容物コンベア21に存在しない状態でラインが稼働することを確実に回避できる。
(もっと読む)
果実保持装置
【課題】イチゴを吸着保持する際のイチゴの損傷を抑制する。
【解決手段】制御部が、吸着前画像取得部により取得されたイチゴの画像から、イチゴの向きと吸着位置とを検出し(ステップS10,S12)、移動部を介して、一端部にイチゴと接触する接触部を有する筒状の吸着管を移動して、接触部をイチゴの吸着位置に接近させ、接触部がイチゴの吸着位置に接触する前に、吸着管の内部を負圧にする負圧発生機構の動作を開始する(ステップS18)。これにより、イチゴの方が、イチゴが載置されている面(載置面)から離れて吸着管に吸い寄せられるようになる。
(もっと読む)
果実の容器詰め装置
【課題】出荷パック内に見栄え良くイチゴを整列する。
【解決手段】制御部は、マシンビジョン62が取得した収穫箱70に収容されたイチゴの画像に基づいてイチゴの吸着位置を検出し、イチゴ搬送装置10に、収穫箱70に収容されたイチゴを吸着保持させるとともに、中継コンベア40上にイチゴを一旦載置させる処理と、マシンビジョンが取得した中継コンベアに載置されたイチゴの画像に基づいてイチゴの向き及び吸着位置を検出し、イチゴ搬送装置に、中継コンベアに載置されたイチゴを吸着位置にて吸着保持させるとともに、イチゴの向きに基づいて出荷パック52A〜52Dにイチゴを搬送させる処理とを実行させる。
(もっと読む)
整合装置及び封入封緘装置
【課題】用紙の幅寸法に対して封筒の幅寸法に余裕があるときに整合動作を省略して生産性を向上させる。
【解決手段】搬入した用紙の両側端を整合する整合部4を備えた整合装置1において、用紙を封入する封筒の封筒サイズ情報から得られる幅寸法から整合対象となる用紙の用紙サイズ情報から得られる幅寸法を差し引いた差分値と、予め設定された整合動作実行判別用閾値とを比較し、前記閾値を超えたときに整合動作を行わないように制御する制御部7を備えた。
(もっと読む)
箱詰め装置
【課題】装置の大幅な改造を行わずに、物品変則詰め作業を自動化できる箱詰め装置を提供する。
【解決手段】箱詰め装置100の整列コンベア20の無端ベルト2Vは、駆動装置31、32を用いて独立して駆動される第1無端ベルト2VAおよび第2無端ベルト2VBを備える。そして、箱詰め装置100は、整列コンベア20の物品収容部2C、2C’が、第1無端ベルト2VA上に立設する第1仕切部材2Aの連なり、および、第2無端ベルト2VB上に立設する第2仕切部材2A’の連なりによって形成され、第1仕切部材2Aの連なりと、第2仕切部材2A’の連なりと、が、無端ベルト2Vの移動方向において交互に配置され、第1仕切部材2Aの連なりを用いて整列される物品Pの個数が、第2仕切部材2A’の連なりを用いて整列される物品Pの個数と異なるように構成されている。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
物品移載装置および物品移載方法
【課題】箱体への物品の投入時に、物品が箱体の外にこぼれ落ちることを防止できる物品移載装置および物品移載方法を提供する。
【解決手段】箱体17の収納容積の種別を箱センサ36,37により判別し、箱体17に既に収納されている物品16の体積を、箱体17の上方に位置した距離センサ35により検出されるデータにより求め、箱体17内の物品16の容積が箱体17の収納容積の一定の比率以上のとき、ベルト送り装置28によるベルト体27の送り出しが終了する前にチェーン駆動モータ24を駆動してチェーン23a,23bの移動を開始し、それに伴うベルト体27の一方の端辺部27aの周回を開始する。これにより、ベルト体27が箱体17内の一定の比率以上の物品16の上に載ることに起因して、ベルト体27に支持された物品16が箱体17の外部に放り出されることが回避される。
(もっと読む)
箱詰め装置の運転方法
【課題】 物品収容部外へと物品を飛び出させるリスクおよび無端ベルトへの過剰負荷が、従来例よりも低減する箱詰め装置の運転方法を提供する。
【解決手段】 箱詰め装置100の運転方法は、整列コンベア2の運転パターンが、物品1の受け渡しにおける整列コンベア2での物品の処理能力に応じて区分けされている。そして、制御装置30が、検出手段20を用いて物品供給コンベア3での物品1の供給能力のサンプリングを行い、このサンプリングデータに基づいて物品1の供給能力の最大値を抽出し、この最大値に適合する運転パターンの設定値を用いて整列コンベア2での物品1の処理能力を調整する方法である。
(もっと読む)
箱詰め装置の運転方法
【課題】 箱詰め装置の電力消費量を従来よりも抑制できる箱詰め装置の運転方法を提供する。
【解決手段】 箱詰め装置100の運転方法は、検出手段20の出力信号に基づいて物品1の供給が一定の監視時間を超えて検出されない場合、箱詰め装置100の自動運転モードから一時停止モードへの切り替えが行われ、監視時間は、ユーザーにより任意の値に設定される方法である。
(もっと読む)
ワーク箱詰め装置
【課題】ワーク2を保持してケース6内に挿入するワーク保持挿入手段10が旋回する際に、センサの配線等が邪魔にならないようにする。
【解決手段】ワーク搬送バケットコンベヤ4によって搬送されてきたワーク2を、ワーク保持挿入手段10によって保持し、ケースコンベヤ8によって搬送されてきたケース6内に挿入する。ケース6内にワーク2を複数段積み重ねて挿入する場合、1段ずつ逆向きにして重ねるためにワーク保持挿入手段10を180度旋回させる。ワーク2が保持されているか否かを検知するためのセンサとして、光電管48を固定側のケースコンベヤ8の側方に設け、反射ミラー90をワーク保持挿入手段10側に設ける。ワーク2を保持しているときは光電管48からの光がワーク2によって拡散され、保持していないときには、ミラー90によって反射されるので、ワーク2の有無を検知できる。
(もっと読む)
位置補正装置、電気部品収納装置および電気部品検査装置
【課題】登録するために製品を正しい姿勢にする必要がない位置補正装置、電気部品収納装置および電気部品検査装置に関する。
【解決手段】ターンテーブルTの接線方向をX軸、半径方向をY軸としXY軸との原点O’と、搬送された電子部品の中点とのずれを検出する第1の検出手段と、XY軸の原点O’とターンテーブルの中心とを結ぶθ基準線に対する電子部品Wの角度のずれを検出する第2の検出手段と、前記搬送された電子部品を載置するステージSと、第1の検出手段及び第2の検出手段で検出したズレを戻す方向にステージSを移動させることにより、電子部品Wの姿勢を補正する移動手段と、を備える。
(もっと読む)
搬送装置
【課題】物品群の前後端を効率よく揃えて当該物品群を搬送する搬送装置を提供する。
【解決手段】物品群Zを搬送する搬送装置1であって、物品群Zが滑動するシュート2と、シュート2の下方端に近接配置され、滑動した物品群Zが載置される載置台3と、載置台3の上方に配置されるコンベヤ4と、を備え、コンベヤ4は、載置台3上における物品群Zの搬送方向後端を押圧搬送可能な搬送片54を所定間隔で複数配設した無端索体51、及び、無端索体51を回転させる駆動手段6aを有する無端搬送手段を備えており、搬送片54は、シュート2の滑動面21上において物品群Zを受け止めて該物品群Zの搬送方向前端を揃えることを特徴とする搬送装置1。
(もっと読む)
選果システム
【課題】表面が柔らかい青果物でも容易に箱詰めできる選果システムを提供する。
【解決手段】青果物6を載置した載置台5を上流側から下流側に搬送する主搬送手段が備えられ、主搬送手段には上流側から青果物6を載置台5上に載せる載置工程と、前記青果物6の品質を測定する品質計測工程と、前記品質計測工程の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程とが設けられる選果システムにおいて、パック詰め工程は、主搬送手段の下流部で等級や階級別に分岐して搬送する複数の選別ライン30が設けられ、各選別ライン30の側方には、載置台5上に載置された青果物6のがく片側を吸着してパック48まで搬送し、整列させて吸着を解除してパック48内に詰めるパック詰めロボット33を備えるものとする。
(もっと読む)
物品分離装置
【課題】物品を連続して搬送しながら、物品を傷めることなく、後続の物品から分離させる物品分離装置を提供する。
【解決手段】物品を列をなした状態で搬送する搬送コンベヤ手段10と、先頭の物品に当接係合する係合部材51と、係合部材を移動させる係合部材駆動手段50と、隣接する物品同士間に進入そして脱出する分離部材31と、分離部材を移動させる分離部材駆動手段30を備え、係合部材駆動手段50が係合部材を先頭の物品P1の前面に当接した状態で前進せしめ、かかる状態で分離部材駆動手段30が分離部材を物品間に入り込ませて物品の搬送速度より遅い速度で前進移動させると共に、係合部材駆動手段50は、係合部材を先頭の物品P1の前面への当接を解除した後に、分離部材31が入り込んでいる物品P1,P2間に進入せしめ、分離部材31の移動速度より速い速度で係合部材を前進させて物品P1を前方へ押し出し、後続の物品P2から分離させる。
(もっと読む)
1 - 20 / 174
[ Back to top ]